5105
Correction of Eddy Current Induced Phase Variations between Imaging and Navigator Echoes in High Angular Resolution Diffusion Imaging1The Department of Biomedical Engineering, The Chinese University of Hong Kong, Hong Kong, Hong Kong, 2Multi-scale Medical Robotics Center, Hong Kong, Hong Kong
Synopsis
Keywords: Diffusion Reconstruction, Diffusion Tensor Imaging, 2D navigator, eddy current, phase correction, High Angular Resolution Diffusion Imaging
Motivation: The time-varying eddy current caused by diffusion gradient can induce additional phase difference between imaging and navigator echoes. These inaccurate measurements may cause residual artifacts in the subsequently reconstructed data.
Goal(s): This study aims to verify the presence of the eddy-current-induced phase differences in navigator echoes and the phase correction can improve reconstruction performance on in-vivo DTI and HARDI.
Approach: We proposed a procedure to calibrate eddy-current-induced phase difference from a phantom and considered the additional phase difference when using k-d SVD method for reconstruction.
Results: The robust reconstruction performance can be achieved by using phase-corrected navigator data to recover highly-undersampled data.
Impact: This study demonstrates that the eddy-current-induced phase differences between imaging and navigator echoes can be calibrated in advance, and then corrected during the k-d SVD reconstruction method to enable highly-accelerated multi-shot high angular resolution diffusion imaging (HARDI).
Introduction
The successful reconstruction of multi-shot diffusion tensor imaging (DTI) relies on proper correction of inter-shot phase variations, and 2D navigator echo is commonly used in multi-shot DTI for measuring this type of data inconsistencies(1,2). However, the time-varying eddy current associated with diffusion gradient(3) can induce additional phase difference between imaging and navigator echoes, leading to inaccurate measurement of inter-shot phase variations that may cause residual artifacts in the reconstructed diffusion-weighted images. In this study, we first verified the presence of eddy-current-induced phase difference between imaging and navigator echoes and its dependency on diffusion direction. Then, we proposed a procedure to calibrate the eddy-current-induced phase difference from a phantom for each diffusion direction. Finally, the k-d SVD reconstruction method(4) was further modified to take into account the pre-calibrated phase differences for reconstructing highly-accelerated multi-shot high angular resolution diffusion imaging (HARDI) data without any residual artifacts.Methods
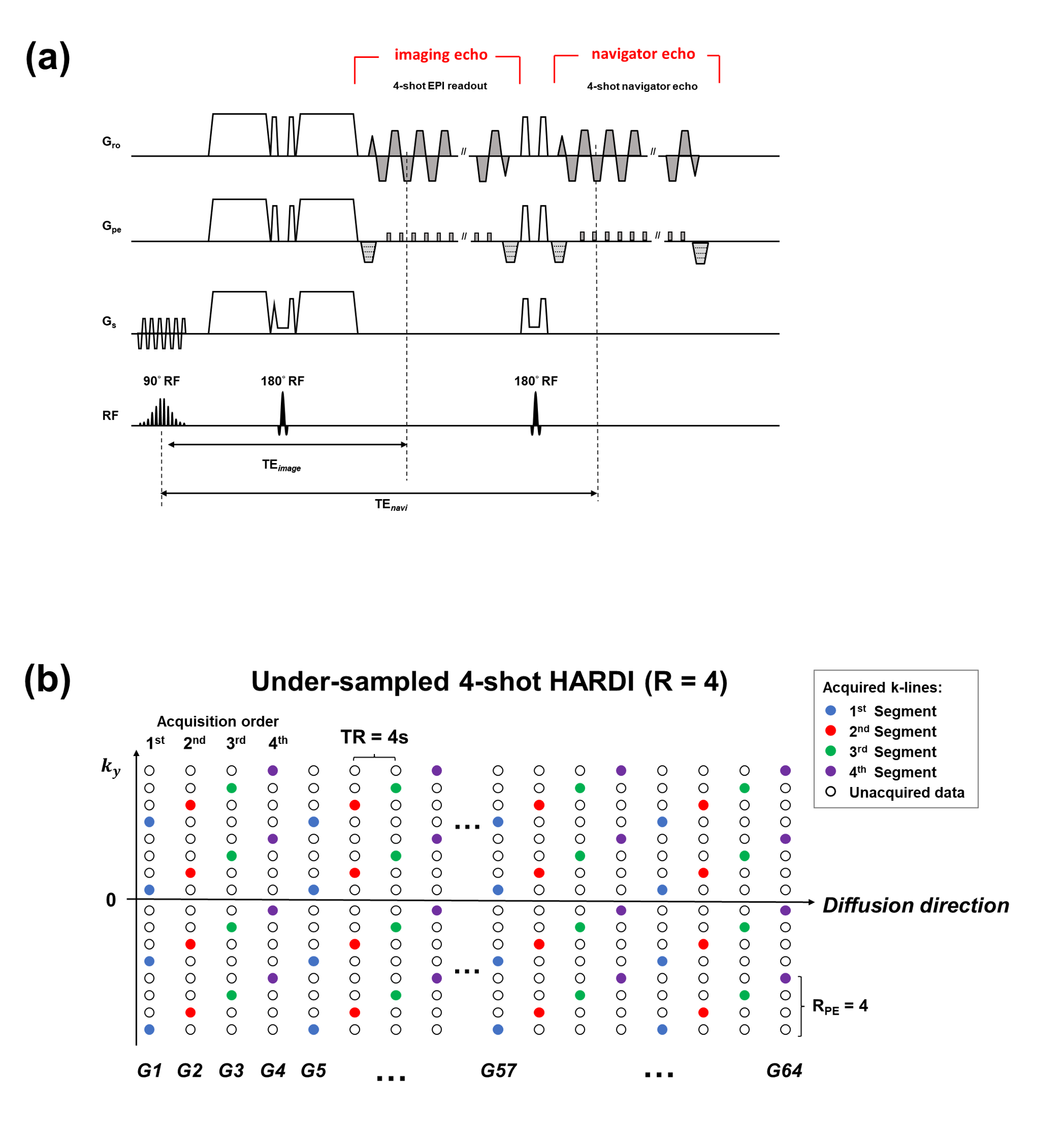
Design of pulse sequenceThe 2D navigator echo was implemented into an interleaved diffusion-weighted EPI sequence (Fig.1a). For investigating the presence of eddy-current-induced phase differences between imaging and navigator echoes, the Gro and Gpe gradients (grey-shaded in Fig.1a) were turned off and only the FID signal was acquired for each EPI readout.
Data acquisition
Three sessions of data were collected on a 1.5T GE MRI scanner using the proposed pulse sequence (Fig.1a) with a 12-channel head coil. In Session 1, a series of FID signals between imaging and navigator echoes at different diffusion directions were obtained by turning off the Gro and Gpe gradients. In Sessions 2&3, two HARDI datasets were respectively collected from a phantom and a healthy volunteer with the identical scan parameters as follows: matrix size=128$$$\times$$$128, FOV=24cm, b-value=0/800 s/mm2, number of shots=4, 64 diffusion directions with a spherical ordering(5). Four-fold undersampled dataset was simulated by selecting one of k-space segments for each diffusion direction in a cyclical manner (Fig.1b).
Data reconstruction and analysis
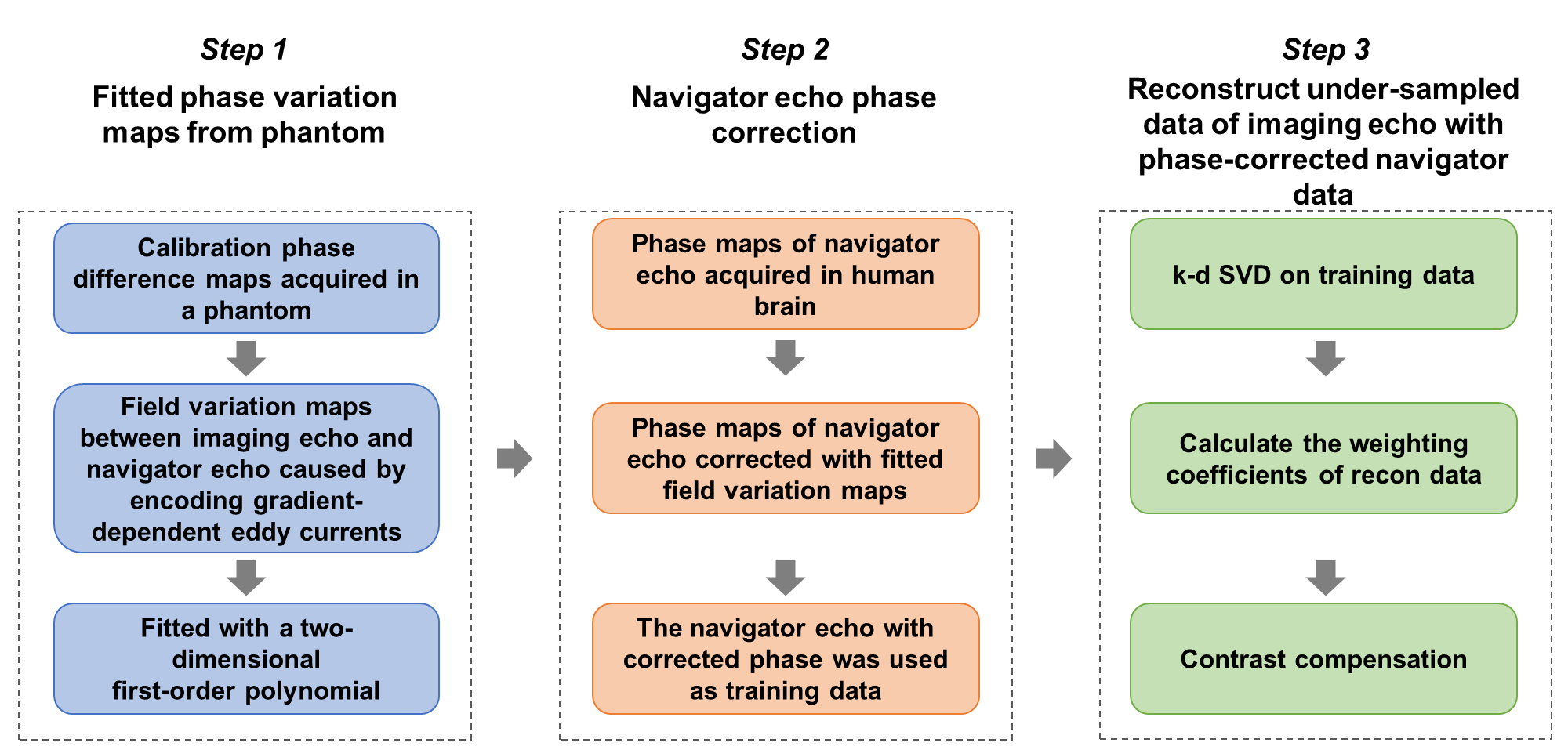
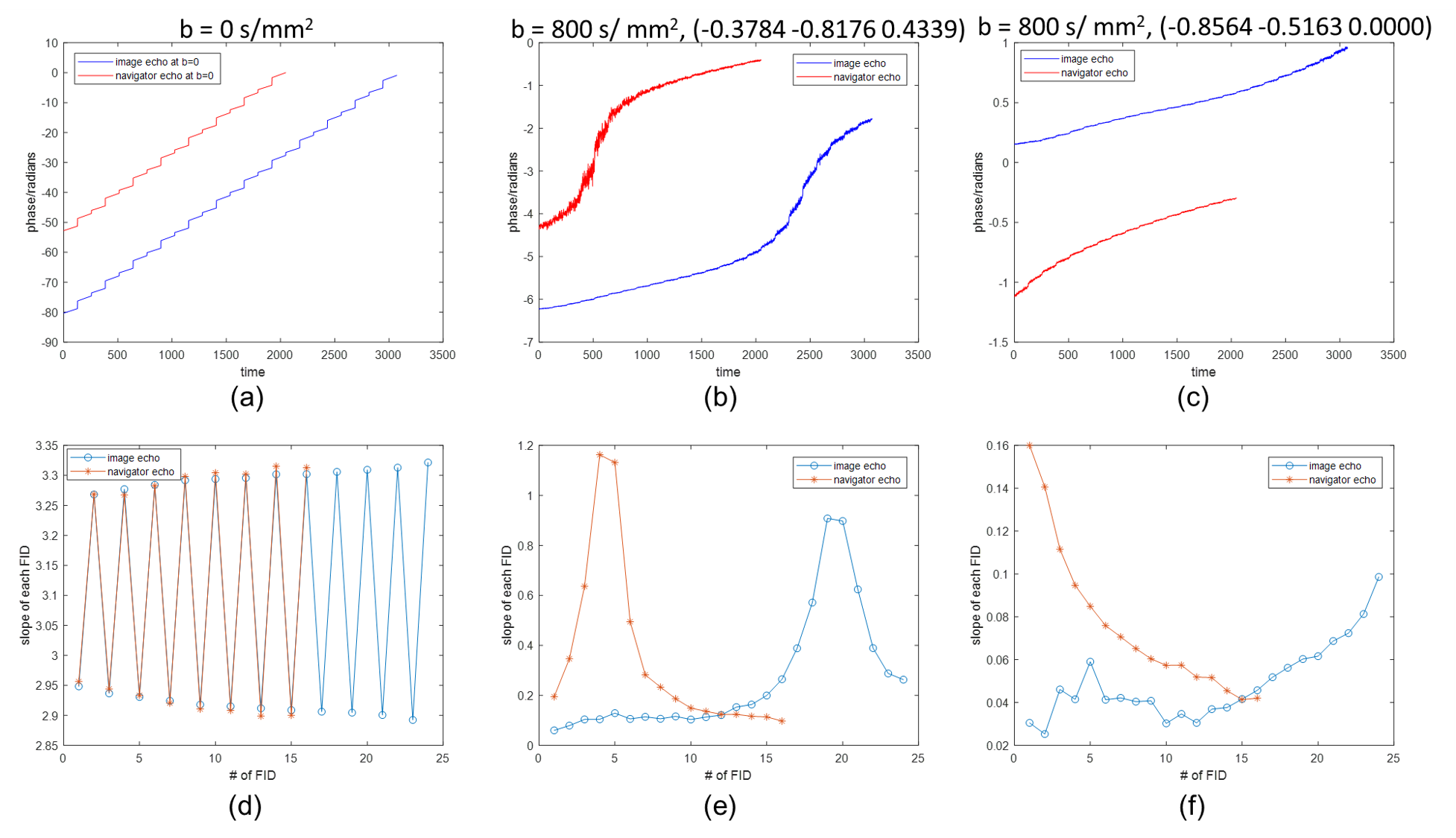
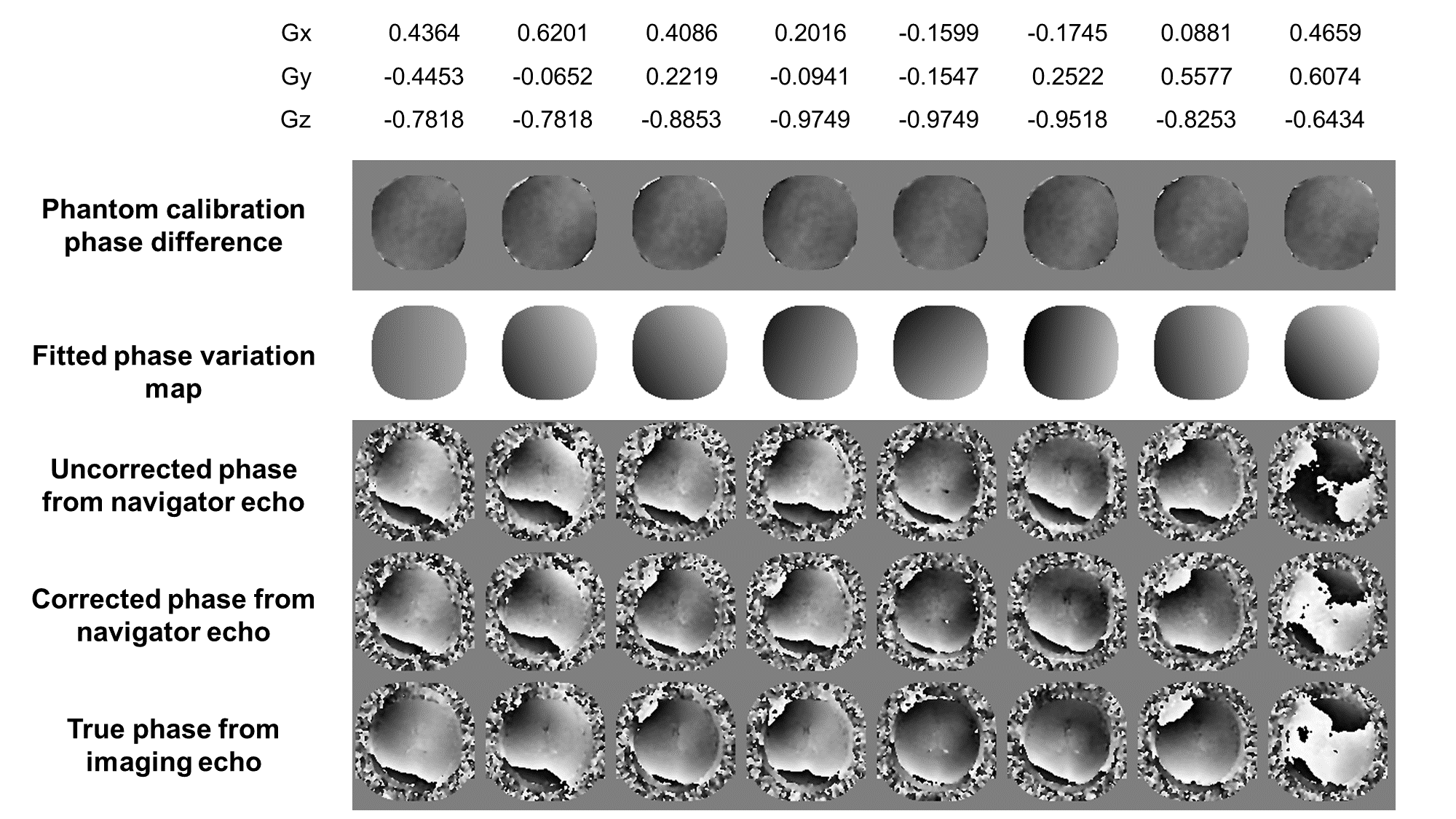
For a series of acquired FID signals (Session 1), the phase change slope of each FID was derived after applying 1D phase unwrapping. Then all slopes at different time points were compared between imaging and navigator echoes to verify the presence of time-varying eddy current. For the phantom data (Session 2), different k-space segments were individually reconstructed with SENSE(6) for both imaging and navigator echoes. The baseline phase was removed by applying the coil sensitivity profiles derived from imaging and navigator data at b = 0 s/mm2 respectively. The phase difference between imaging and navigator echoes at each specific diffusion direction was fitted with a first-order 2D polynomial function. For the in-vivo brain data (Session 3), the fitted phase difference maps were used to remove the additional phase variations due to eddy current effect for all navigator echoes. Afterward, the navigator echoes of different diffusion directions with corrected phase were used as the training data for k-d SVD reconstruction(4), and recovered the highly-undersampled HARDI data (Fig.2). For comparison, the imaging data was reconstructed using MUSE(7) with the inter-shot phase variations measured from either imaging or navigator echoes.
Results
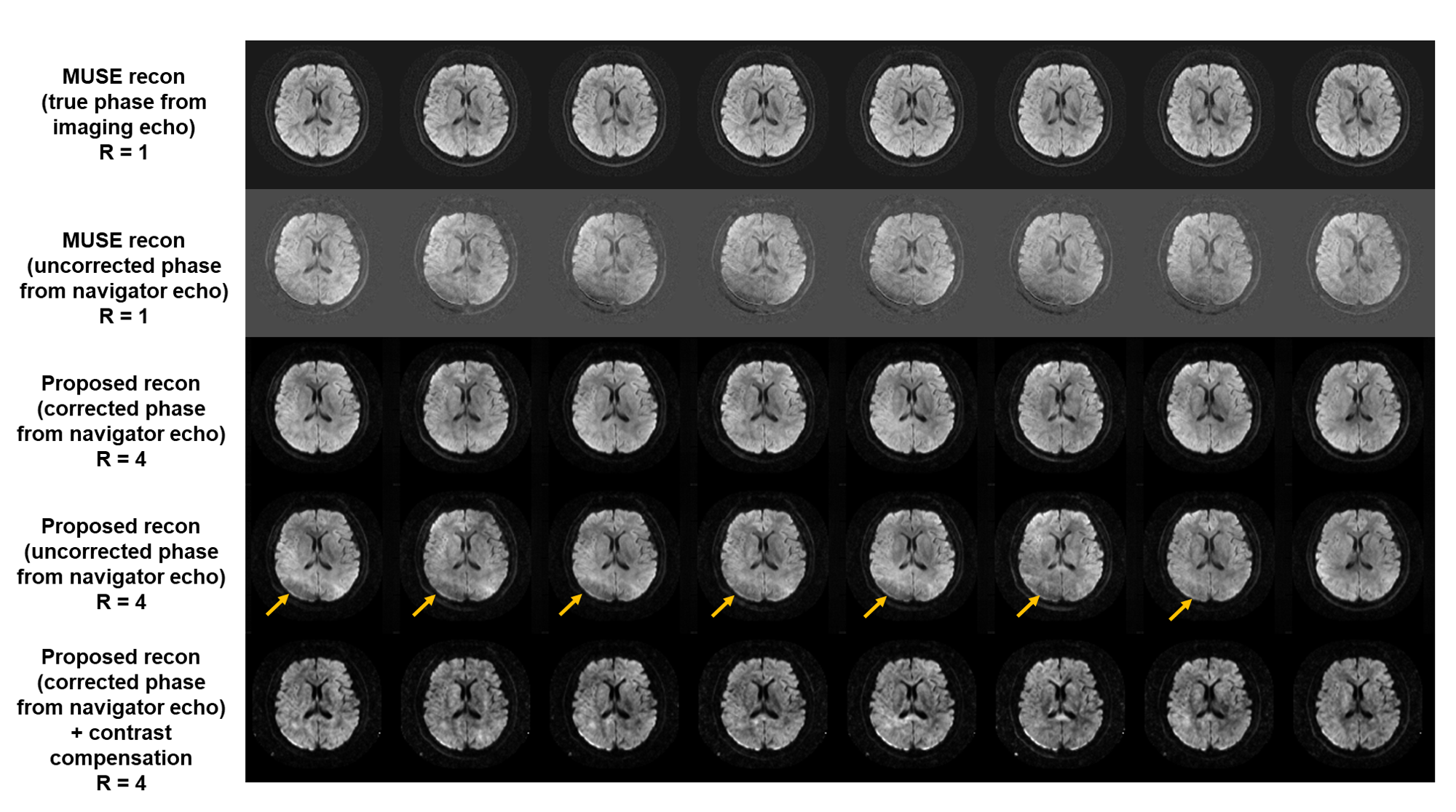
Fig.3 shows the comparison of phase change slopes across time in imaging and navigator echo at b = 0/800 s/mm2 with two different diffusion directions. Fig.4 shows the phase difference maps acquired from phantom and the corresponding fitted maps across eight different diffusion directions. Fig.4 also shows the phases of navigator echoes with and without phase correction, and the true phase maps measured from imaging echo in human brain for comparison. Fig.5 shows the reconstructed diffusion-weighted images of eight diffusion directions using MUSE and our proposed method with and without applying phase correction in navigator data.Discussion
Our study has verified that the presence of phase difference between imaging and navigator echoes were caused by the time-varying eddy current of diffusion gradients. The eddy-current-induced phase variations can be calibrated from a phantom in advance, and no extra calibration scan is required for in-vivo HARDI application with k-d SVD method. For conventional MUSE with linear reconstruction model, the residual phase difference between imaging and navigator echoes only caused incomplete phase correction on the real image data. However, the proposed k-d SVD method required a training data acquired from navigator echoes with reliable phase information to recover image from highly-undersampled data. Therefore, the correction for phase difference between imaging and navigator echo is a crucial step for achieving robust reconstruction performance.Conclusion
Our study demonstrates the presence of eddy-current-induced phase difference between imaging and navigator echoes, and applying the phase correction for navigator data can improve the reconstruction performance of highly-accelerated HARDI data using k-d SVD method.Acknowledgements
The work was in part supported by grants from Hong Kong Research Grant Council (GRF17106820, GRF17125321, GRF14206723, and ECS24213522).References
1. Jeong HK, Gore JC, Anderson AW. High‐resolution human diffusion tensor imaging using 2‐D navigated multishot SENSE EPI at 7 T. Magnetic resonance in medicine 2013;69(3):793-802.
2.Jeong HK, Dewey BE, Hirtle JA, Lavin P, Sriram S, Pawate S, Gore JC, Anderson AW, Kang H, Smith SA. Improved diffusion tensor imaging of the optic nerve using multishot two‐dimensional navigated acquisitions. Magnetic resonance in medicine 2015;74(4):953-963.
3.Truong T-K, Chen N-k, Song AW. Dynamic correction of artifacts due to susceptibility effects and time-varying eddy currents in diffusion tensor imaging. NeuroImage 2011;57(4):1343-1347.
4.Chen S, Chang H-C. Highly-Accelerated Multi-shot Diffusion Imaging with High Angular Resolution Enabled by kd SVD.
5.Chao TC, Chiou JyG, Maier SE, Madore B. Fast diffusion imaging with high angular resolution. Magnetic resonance in medicine 2017;77(2):696-706.
6.Pruessmann KP, Weiger M, Scheidegger MB, Boesiger P. SENSE: sensitivity encoding for fast MRI. Magnetic resonance in medicine 1999;42(5):952-962.
7.Chen N-k, Guidon A, Chang H-C, Song AW. A robust multi-shot scan strategy for high-resolution diffusion weighted MRI enabled by multiplexed sensitivity-encoding (MUSE). Neuroimage 2013;72:41-47.
Figures