4988
Detection and Correction of Spurious Motion Within Overlapped Multi-Slice Prostate T2-Weighted Acquisitions1Radiology, Mayo Clinic, Rochester, MN, United States, 2Century High School, Rochester, MN, United States
Synopsis
Keywords: Motion Correction, Motion Correction
Motivation: Motion frequently impairs T2 weighted prostate imaging; in the multi-pass acquisitions that are common this results in an objectionable stair-step artifact, and can lead to additional scans and increased exam time.
Goal(s): Reduce the impact of motion occurring in a subset of the multi-pass acquisition.
Approach: Automatic detection of motion (through a mutual-information metric) coupled with replacement of corrupted slices via averaging of neighbors. In the described case, adjacent slices are intentionally overlapped, leading to reasonable results from this approach.
Results: Improvements are clearly visible in both motion-controlled phantom and a subset of volunteer examinations.
Impact: The ability to automatically repair a portion of motion-corrupted exams may enable reduction of supplemental / repeat scans, improving overall exam times. The described technique is not computationally complex, and could be performed inline after scan completion.
Introduction
Undesirable voluntary and involuntary patient motion (peristalsis) frequently occurs during prostate imaging1, and even if it is subtle can interfere with the desired sub-mm in-plane resolution of T2-weighted spin-echo (T2SE) imaging. Multi-pass acquisitions of a stack of axial T2-weighted images, for example with first odd and subsequent even slices acquired, can show slice-to-slice jitter axially or a distinct stair-step behavior in sagittal reformats due to individual passes experiencing differing motion states2. This work presents a simple and robust approach for detecting and mitigating these effects in multi-pass overlapping-slice T2-weighted acquisitions of the prostate as used for thin-slice reconstruction3.Methods
Two distinct steps are performed: detection and healing. To detect the presence of motion within a stack of overlapped-by-design axial slices the Rajski distance4 was selected after testing of several metrics as a measure of similarity between adjacent slices via mutual information. The slices are intentionally overlapped during acquisition by 2mm (3mm slices with 1mm slice-to-slice increment). As such, significant portions of the signal in a slice will remain present in successfully acquired (stable) adjacent slices. Due to this overlap we expect the Rajski distance to be lower (more similar) between adjacent slices without motion corruption than between a stable slice and a motion-corrupted neighbor. The Rajski distance is defined as $$$d(x,y)=1-I(x;y)/H(x,y)$$$ where $$$I(x;y)$$$ is the mutual information of signals (here images) $$$x$$$ and $$$y$$$, and $$$H(x,y)$$$ is their joint entropy. The distance $$$d(x,y)$$$ reaches 0 distance for complete mutual information and is maximized at 1 when there is no mutual information.Once corrupted slices have been identified, those slices are replaced by the average of their immediate neighbors. While other approaches, for example curve-fitting, could be considered, this simple averaging approach limits the possibility of over-fitting to noise and generating spurious results.
To evaluate the utility of the technique, experiments using a motion-controlled phantom (lime suspended in several liters of b-gel) and retrospective evaluation of prostate examinations were performed. In both cases the typical T2SE parameters were TR 3800, TEEFF 100, 16 cm FOV, 320 x 280 in-plane sampling, R=2.0 acceleration, 17 slices acquired per 58 sec pass. For the phantom study the lime phantom was moved in the frequency direction during the third of five passes. Motion was continuous 1-3mm in one direction and then 1-3mm back at 0.035 mm/sec. The evaluations of prostate exams were done under an IRB protocol.
Results
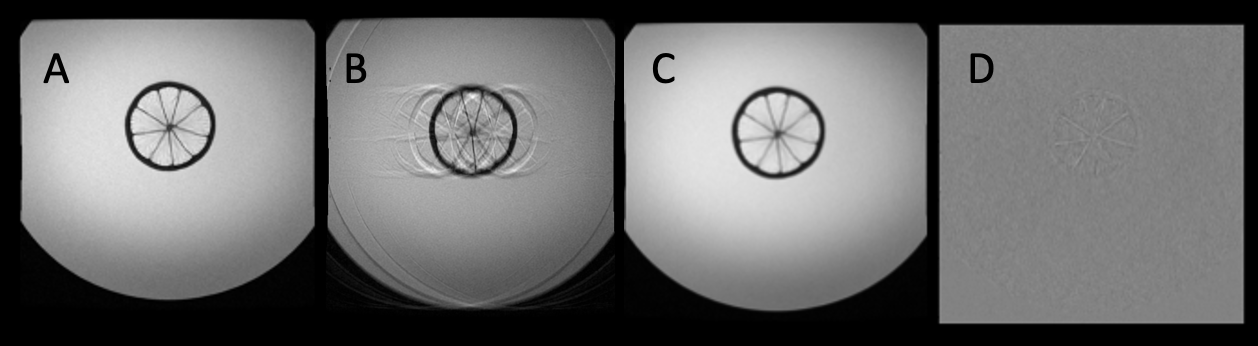
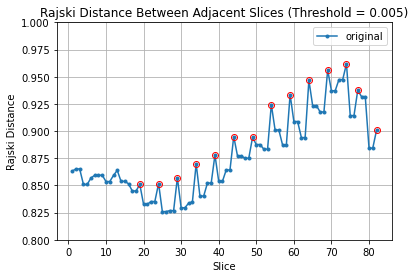
Results from the motion-controlled phantom experiment in Figure 1 show an axial image from a slice imaged in the third pass acquired with no motion, the same slice in the acquisition corrupted by 3mm of motion, its replacement with the described correction and the subtraction with the no-motion result. Frequency encoding (the direction of motion) is up-down in these images.A plot of Rajki distance to nearest-neighbor $$$d_{nn}(n)=min\left(d\left(n-1,n\right),d\left(n,n+1\right)\right)$$$, with $$$d(n,n+1)$$$ the Rajki distance between slices $$$n$$$ and $$$n+1$$$, within a prostate exam is shown in Figure 2. Peaks (values larger than both of its neighbors by some threshold) are readily apparent, with detected slices shown using an example threshold of 0.005.
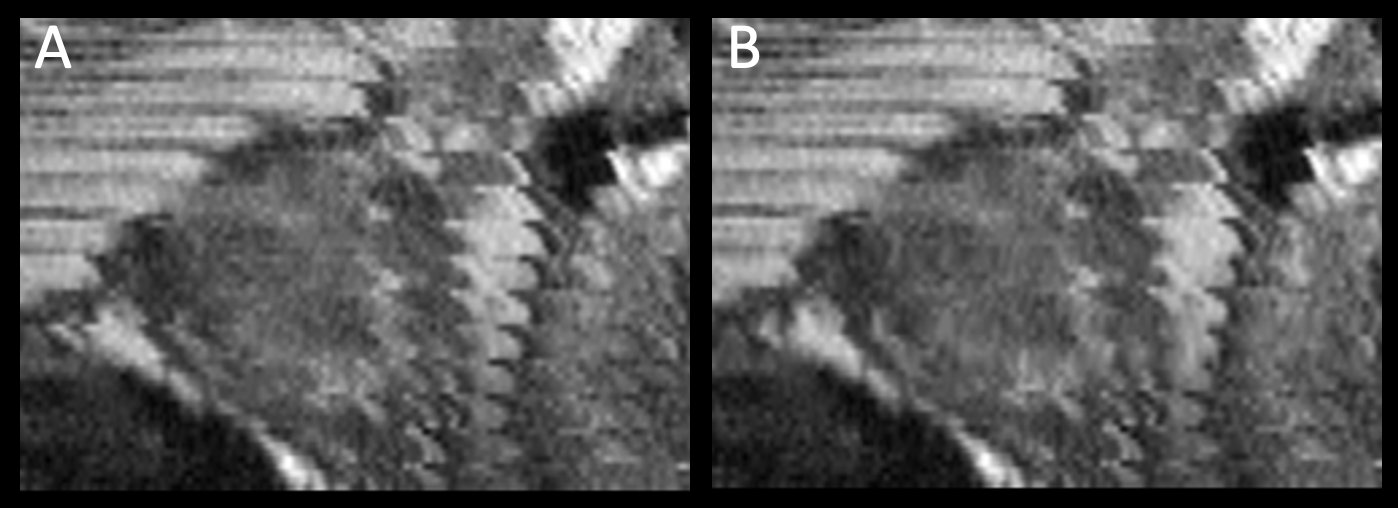
Two examples of reformatted images of motion-corrupted prostate acquisitions without (left) and with (right) the proposed correction are shown in Figure 3. These are all sagittal reformats of the axially acquired images.
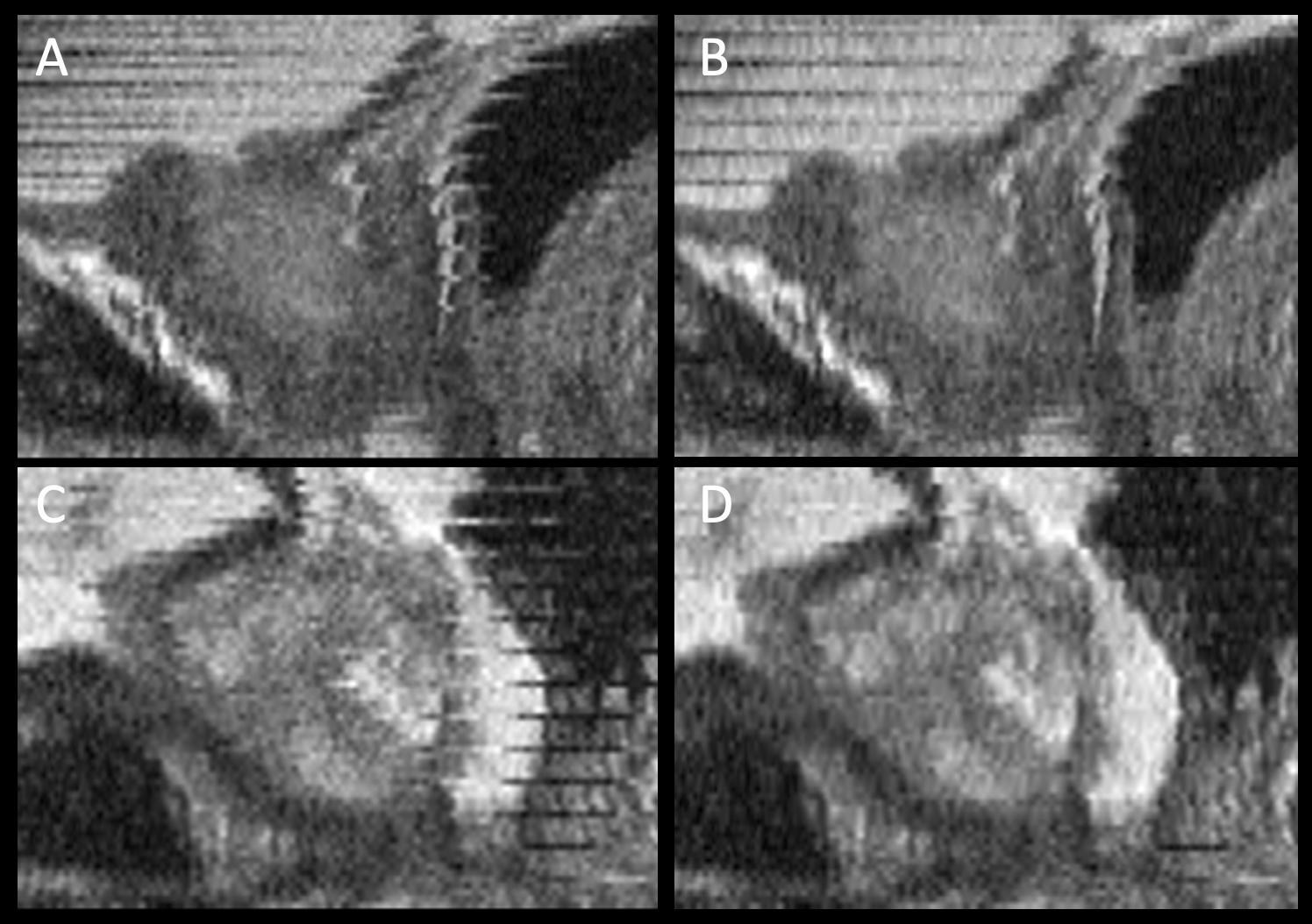
Results from a prostate examination in which motion is not acceptably recovered via this technique are shown in Figure 4.
Discussion
We have shown, experimentally in phantoms and in prostate MRI images, how slices which are motion-corrupted within one pass of a multi-pass, 2D multi-slice acquisition can possibly be corrected using the described method. The method was evaluated for an acquisition in which slices are overlapped, as used for super resolution reconstruction in the slice direction. As the degree of overlap decreases, the robustness of the method will likely diminish. However, even abutting slices have considerable mutual information. This technique relies upon individual passes to experience motion, with the bulk of the remaining passes to be successfully acquired in a nominal position. This is not always the case (Figure 4) but is a behavior that has been frequently observed in our examinations performed without an anti-spasmodic drug.Conclusion
A technique for automatically detecting and replacing motion-corrupted slices in a multi-pass acquisition with overlapping slices has been described and tested in both motion-controlled phantoms and retrospective evaluation of volunteer studies. Potential future work includes further correction of more subtle/gradual motion between passes.Acknowledgements
NIH RR018898, EB031790References
- Padhani A, et al. Evaluating the effect of rectal distension and rectal movement on prostate gland position using cine MRI. International Journal of Radiation Oncology*Biology*Physics. 1999;44(3):525-533.
- Borisch E, et al. Motion Correction of T2SE Multi-Pass Acquisitions for Super-Resolution in the Slice Direction. ISMRM 2020 #3339
- Kargar S, et al. Use of kZ-space for high through-plane resolution in multi-slice MRI: application to prostate. Magnetic Resonance in Medicine 2019;81:3691-3704
- Rajski C. A metric space of discrete probability distributions. Information and Control. 1961;4(4):371–377
Figures