4987
Scout and guidance line-based retrospective motion correction for susceptibility-weighted-imaging (SWI)1Ruprecht-Karls-Universität Heidelberg, Heidelberg, Germany, 2Siemens Healthineers, Erlangen, Germany, 3Siemens Medical Solutions, Boston, MA, United States, 4Siemens Shenzhen Magnetic Resonance Ltd., Shenzhen, China, 5Massachusetts General Hospital, Boston, MA, United States, 6A. A. Martinos Center for Biomedical Imaging, Boston, MA, United States
Synopsis
Keywords: Motion Correction, Motion Correction
Motivation: Motion artifacts are a common source of artifacts in clinical brain imaging.
Goal(s): To facilitate efficient retrospective motion correction for susceptibility-weighted-imaging (SWI).
Approach: A 2 sec motion-free pre-scan and the repeated acquisition of additional k-space encoding lines (guidance lines) were implemented into an GRE-based SWI. Guidance lines are played as an additional gradient-echo before the imaging echo which retains the original scan efficiency. Scout and guidance lines are then used for very rapid, fully separable motion trajectory estimation and correction.
Results: In vivo, reduced motion artifacts and increased image sharpness is demonstrated across several scans with instructed subject motion.
Impact: Scout and guidance-lines based retrospective motion correction is introduced for SWI. Our approach enables efficient motion artifact mitigation while being minimally disruptive to standard clinical protocols and should improve the robustness and reproducibility of clinical brain imaging.
Introduction
Susceptibility weighted imaging (SWI) is part of routine clinical brain exams but also plays an important role in emerging specialized screening protocols, such as for the detection of ARIA (amyloid related imaging abnormalities) in Alzheimer’s disease patients1. However, the long echo times needed to produce T2*/SWI contrast cause long acquisition times and thus increase the susceptibility to patient motion, possibly leading to significant degradation in image quality.Retrospective motion correction often relies on additional image navigator scans2 (TA ~ 200 ms), however, the continuous data acquisition in SWI without sufficiently high dead times prohibits their use. Navigator-free methods3,4 attempt to estimate the motion trajectory and motion-free image from the acquired k-space itself. This overcomes the need for additional navigator placement, however, long computation times have so far impeded wide-spread clinical adoption. The SAMER5,6 method enables very rapid and fully separable motion trajectory estimation by exploiting a rapid pre-scan and the repeated acquisition of 2-4 additional k-space encoding lines (motion guidance lines). In this work, we extend SAMER to 3D GRE-SWI and propose an efficient strategy for the acquisition of guidance line data in SWI which retains the original scan efficiency.
Methods
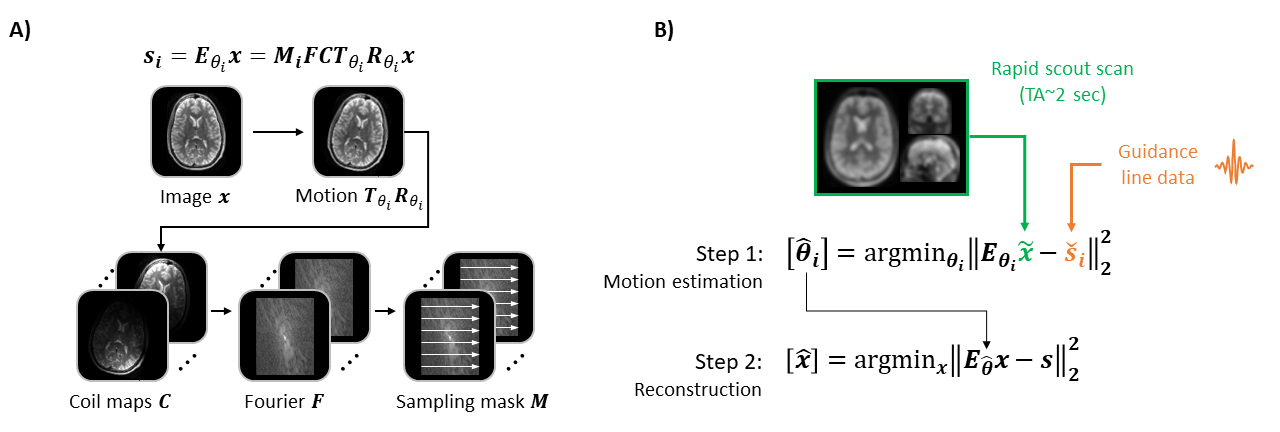
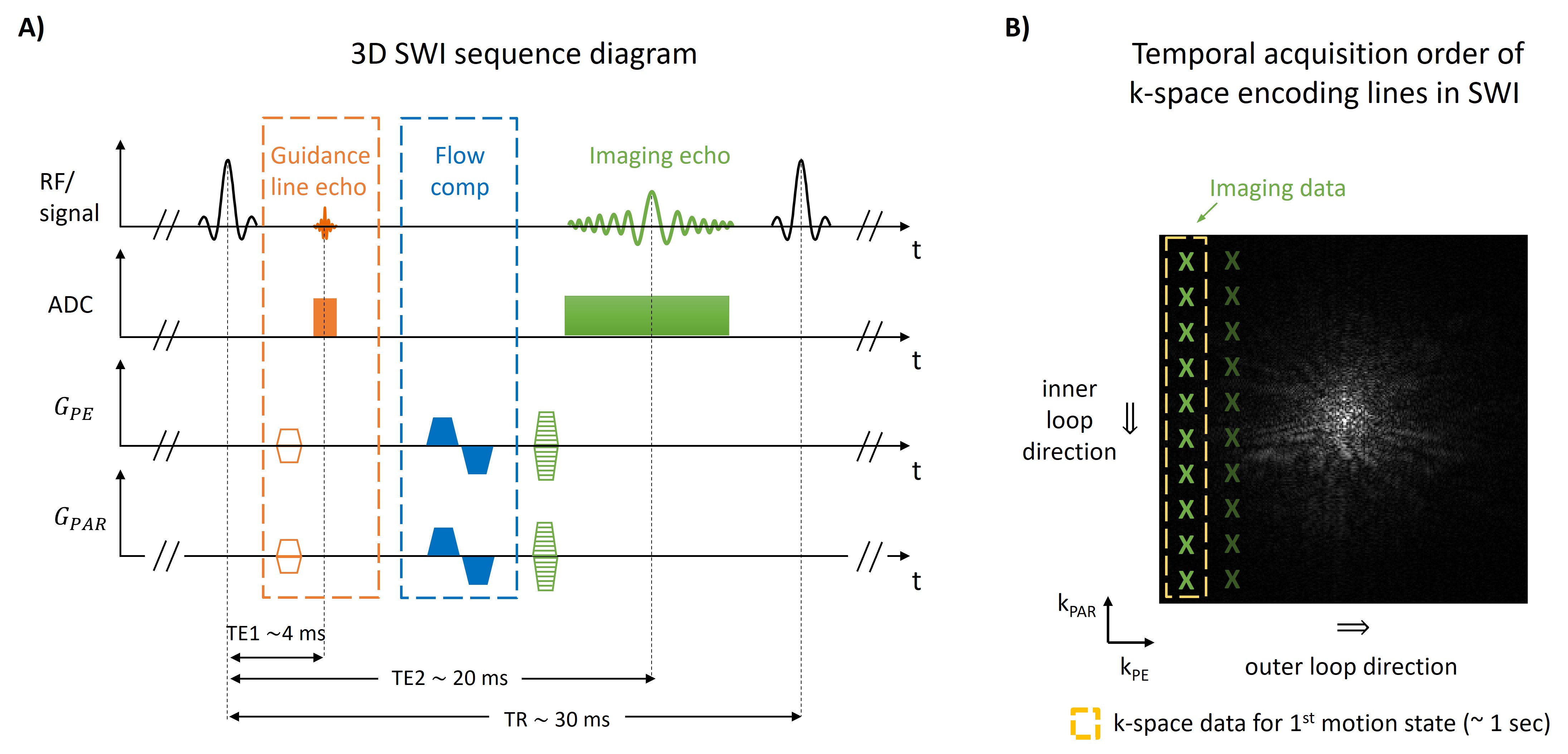
SAMER is an extension of SENSE parallel imaging7 where additional motion operators are included to describe motion within the forward model (Fig. 1A). Using the rapid SAMER scout and the motion guidance lines, SAMER directly estimates the six degrees of subject motion (three in translation and three in rotation direction) by minimizing the data consistency error of this SENSE+motion model (Fig. 1B). This enables fully separable motion optimizations (shot-by-shot) and very rapid compute times (~1 sec/shot).3D GRE-SWI is typically acquired with a long TE (~20 ms) to ensure sufficient T2* contrast. We exploit the dead-time between the RF excitation and the data acquisition by inserting an additional gradient-echo (TE ~4 ms) before the imaging echo (Fig. 2A). Note that guidance lines are acquired close to the center of k-space. The data acquisition in 3D GRE-SWI usually employs a linear reordering scheme (Fig. 2B), i.e., it iterates over all partition encoding lines (inner loop), before continuing with the next phase encoding position (outer loop). To achieve 1-2 sec temporal resolution needed for motion estimation, we collect four motion guidance lines during every run of the inner loop, i.e., roughly once per second. In addition, a contrast-matched low-resolution scout scan (TE ~4 ms; TA ~2 sec) is acquired once before the imaging sequence. Moreover, additional gradients were included to retain compatibility with standard flow-compensation of the imaging data. Note, that flow artifact suppression is only needed for the imaging echo and thus was not implemented for the guidance line echo.
At 3T (MAGNETOM Vida, Siemens Healthcare, Erlangen, Germany), SWI data were acquired with a research sequence at R=2x2 acceleration using a 20-channel head/neck coil. A healthy volunteer was instructed to perform step, breathing, and unsupervised (free) motion during the scans.
Results
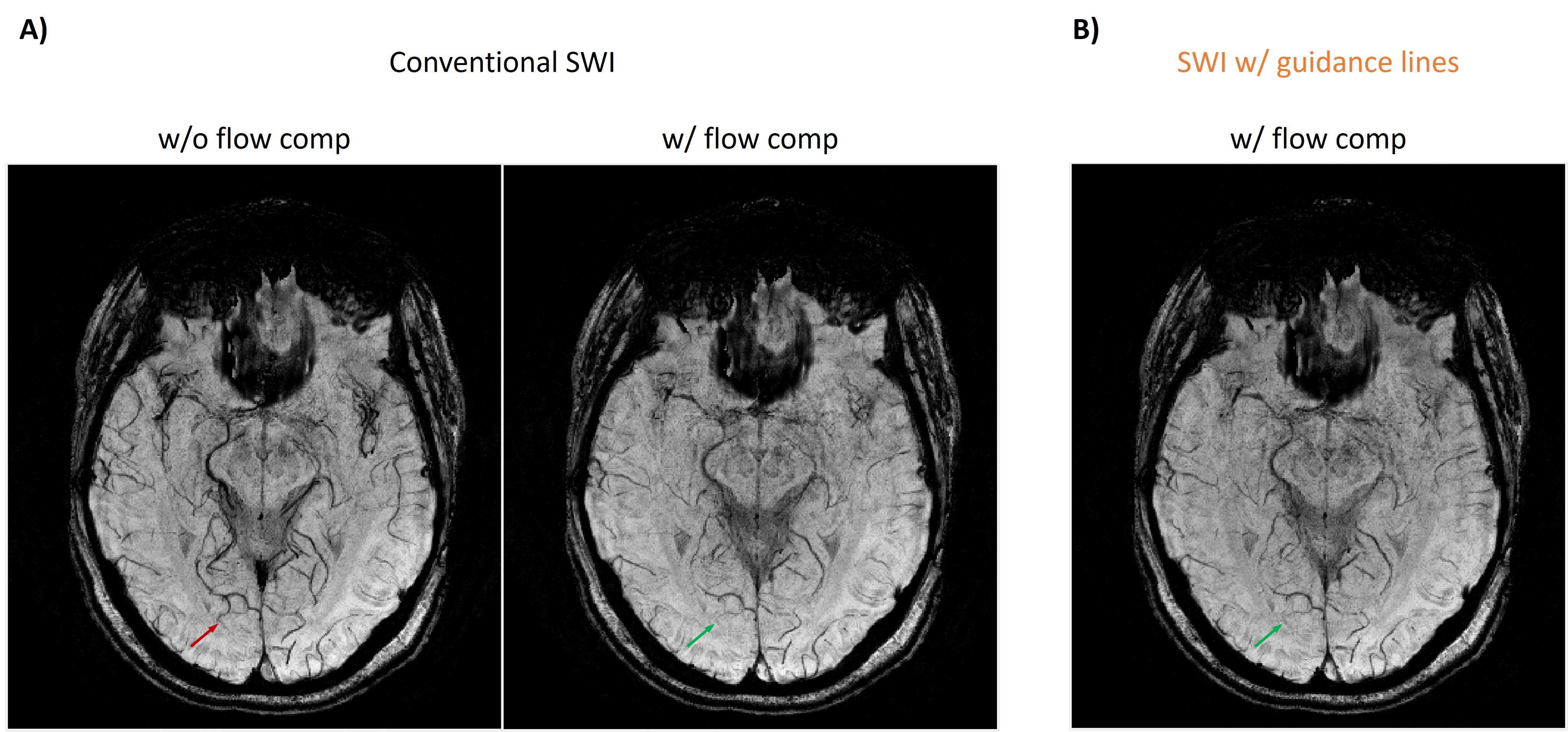
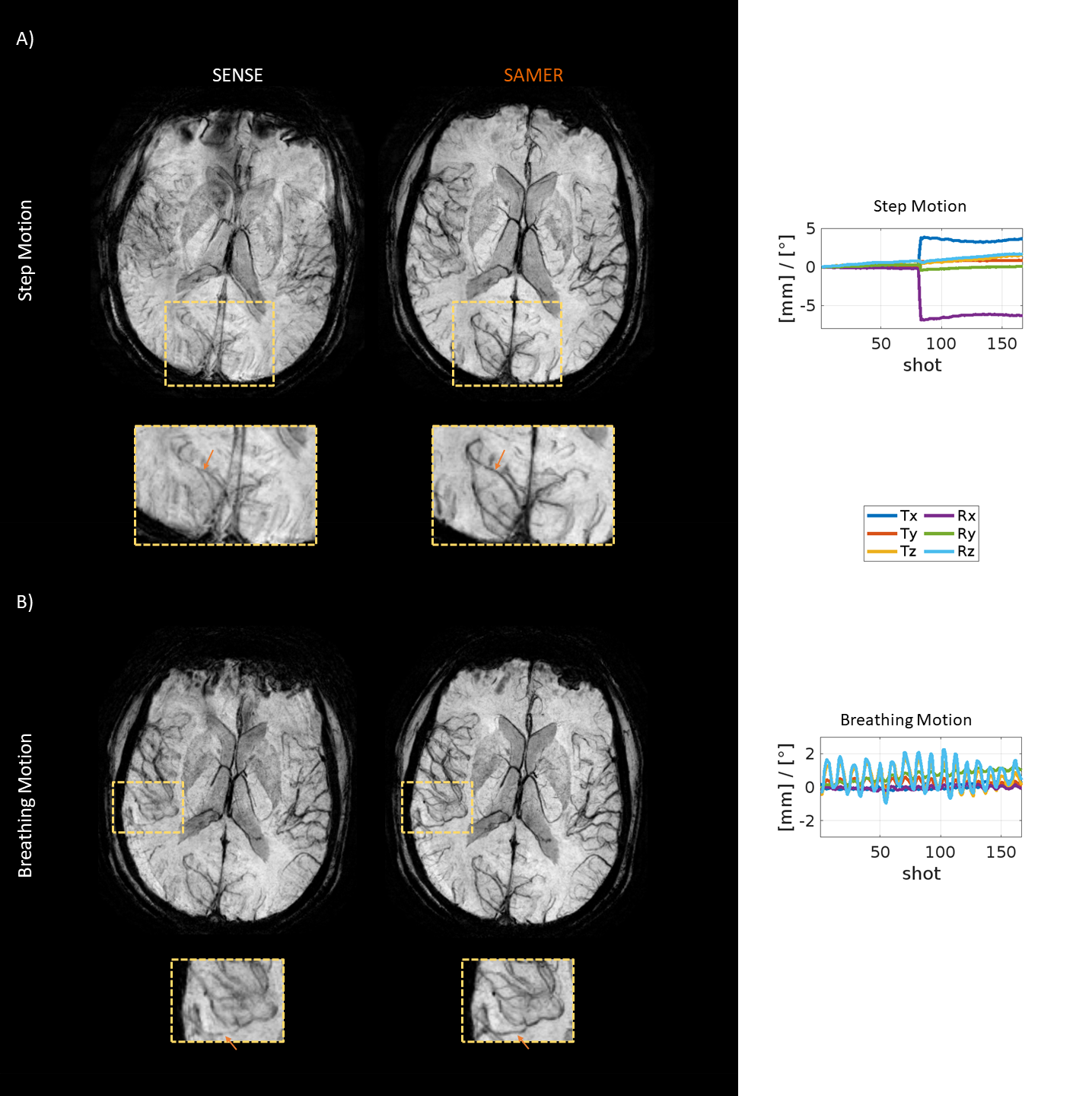
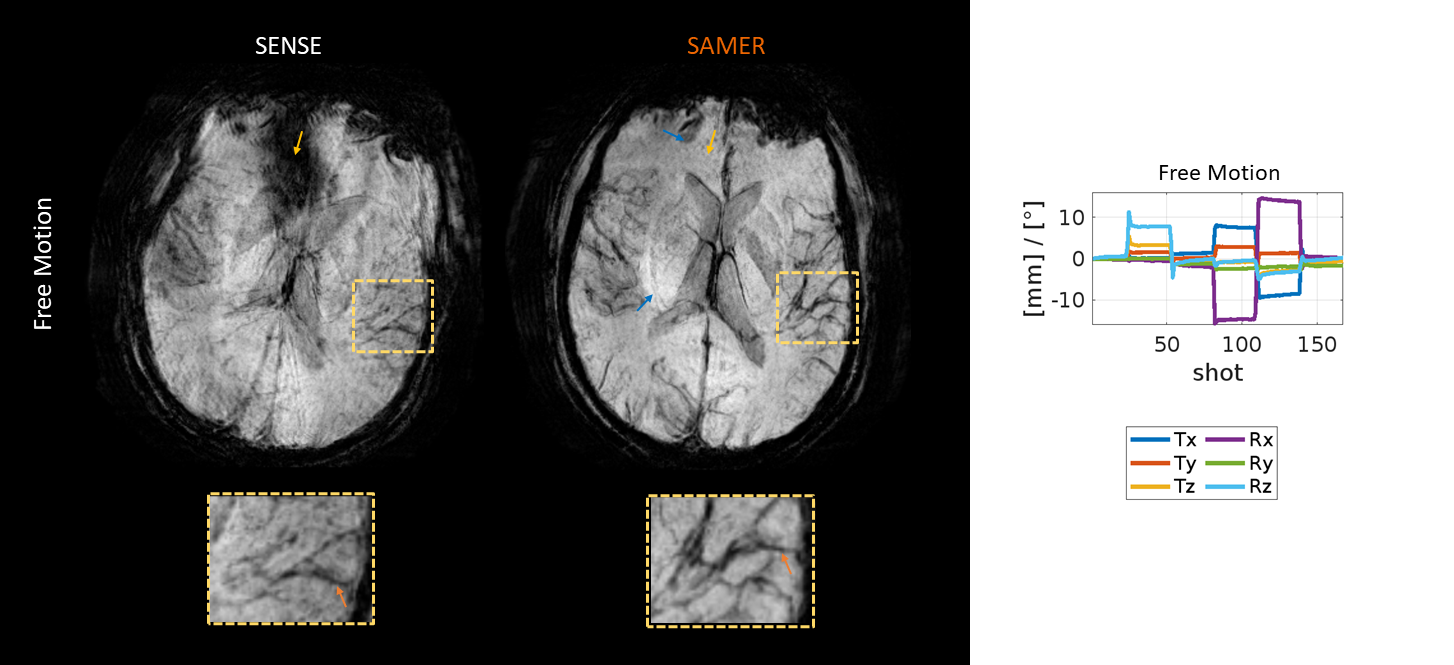
Figure 3 shows comparable image quality and flow-artifact suppression between our proposed GRE-SWI implementation with guidance lines & flow compensation and a conventional GRE-SWI sequence for a case with no motion.Figures 4 and 5 demonstrate reduced motion artifacts and improved visualization of blood vessels in in vivo scans with various instructed motion patterns. However, residual artifacts could be observed, very likely caused by B0 inhomogeneities as seen in Fig. 5.
Discussion
In this work, we extended SAMER to susceptibility-weighted-imaging and demonstrated robust retrospective motion correction. Our efficient strategy for the acquisition of motion guidance line data with integrated flow compensation retained the scan time and image quality/ contrast of a conventional SWI sequence. In scans with instructed subject motion, SAMER SWI enabled very rapid motion trajectory estimation and significant artifact reduction. However, residual artifacts were still seen in some of the scans which are likely caused by susceptibility induced B0 changes across the motion states8. In future work, we will attempt to estimate these phase changes and include them in the SENSE+motion model.Acknowledgements
No acknowledgement found.References
- Cogswell PM, Barakos JA, Barkhof F, Benzinger TS, Jack CR Jr, Poussaint TY, Raji CA, Ramanan VK, Whitlow CT. Amyloid-Related Imaging Abnormalities with Emerging Alzheimer Disease Therapeutics: Detection and Reporting Recommendations for Clinical Practice. AJNR Am J Neuroradiol. 2022 Sep;43(9):E19-E35. doi: 10.3174/ajnr.A7586
- Tisdall MD, Hess AT, Reuter M, Meintjes EM, Fischl B, van der Kouwe AJ. Volumetric navigators for prospective motion correction and selective reacquisition in neuroanatomical MRI. Magn Reson Med. 2012 Aug;68(2):389-99. doi: 10.1002/mrm.23228.
- L. Cordero-Grande, R. P. A. G. Teixeira, E. J. Hughes, J. Hutter, A. N. Price and J. V. Hajnal, "Sensitivity Encoding for Aligned Multishot Magnetic Resonance Reconstruction," in IEEE Transactions on Computational Imaging, vol. 2, no. 3, pp. 266-280, Sept. 2016, doi: 10.1109/TCI.2016.2557069
- M. W. Haskell, S. F. Cauley and L. L. Wald, "TArgeted Motion Estimation and Reduction (TAMER): Data Consistency Based Motion Mitigation for MRI Using a Reduced Model Joint Optimization," in IEEE Transactions on Medical Imaging, vol. 37, no. 5, pp. 1253-1265, May 2018, doi: 10.1109/TMI.2018.2791482
- Polak D, Splitthoff DN, Clifford B, et al. Scout accelerated motion estimation and reduction (SAMER). Magn Reson Med. 2022;87(1):163-178. doi:10.1002/mrm.28971
- Polak, D, Hossbach, J, Splitthoff, DN, et al. Motion guidance lines for robust data consistency–based retrospective motion correction in 2D and 3D MRI. Magn Reson Med. 2023; 89: 1777-1790. doi: 10.1002/mrm.29534
- Pruessmann KP, Weiger M, Börnert P, Boesiger P, Klaas P. Pruessmann. Advances in sensitivity encoding with arbitrary k-space trajectories. Magn Reson Med. 2001;46(4):638-651. doi:10.1002/mrm.1241
- Brackenier, Y, Cordero-Grande, L, Tomi-Tricot, R, et al. Data-driven motion-corrected brain MRI incorporating pose-dependent B0 fields. Magn Reson Med. 2022; 88: 817-831. doi:10.1002/mrm.29255
Figures