4950
Open-Source Algorithm for 3D Gradient Nonlinearity Characterization Using a Rigid Arrangement of NMR Field Probes1Division of Medical Physics, Department of Diagnostic and Interventional Radiology, University Medical Center Freiburg, Faculty of Medicine, University of Freiburg, Freiburg, Germany, 2MR Research Collaboration Team, Siemens Healthineers Ltd., Shanghai, China
Synopsis
Keywords: Gradients, Gradients
Motivation: MRI users rely on vendor-specific means to correct for distortions due to gradient nonlinearity. This study endeavors to measure gradient nonlinearities without a dedicated phantom for MR systems where accurate correction parameters are unavailable.
Goal(s): Develop a nonproprietary gradient nonlinearity measurement procedure.
Approach: We conduct NMR field probe measurements to determine the gradient nonlinearity. A dedicated algorithm detects inconsistencies between the apparent probe positions and seeks the optimal spherical harmonic coefficients correcting for distortions.
Results: We demonstrate the feasibility of the proposed measurement and a reduction of distortions in MR images.
Impact: The proposed nonproprietary approach for measuring gradient nonlinearity induced distortions without a dedicated phantom has the potential to promote accuracy and reproducibility of imaging studies across different MRI systems, if the sites are equipped with a field camera.
Introduction
Fourier-based MR image reconstruction assumes the linearity of gradient fields during signal acquisition, leading to image distortions when gradient nonlinearity (GNL) is present. Correcting these distortions requires a prior knowledge of GNL parameters, typically defined by MR vendors using spherical harmonic (SH) coefficients based on electromagnetic simulations or measurements. However, on many vendor platforms the GNL parameters are not disclosed to the MRI users. To determine GNL on site via measurements, Tao et al. introduced an algorithm utilizing fiducial markers with predetermined real positions [1,2]. However, such approaches are constrained by calibration phantom accuracy, measurement limitations, and utilization of low-order SH. This work utilizes an array of NMR field probe in a rigid probe head to measure probe coordinates in the imaging domain. Field probes provide micrometer precision spatial information [3]. We therefore propose a measurement procedure and a novel optimization algorithm for calibrating GNL distortions using NMR field probe measurements. The feasibility of the proposed algorithm is demonstrated by the improved distorted images.Methods
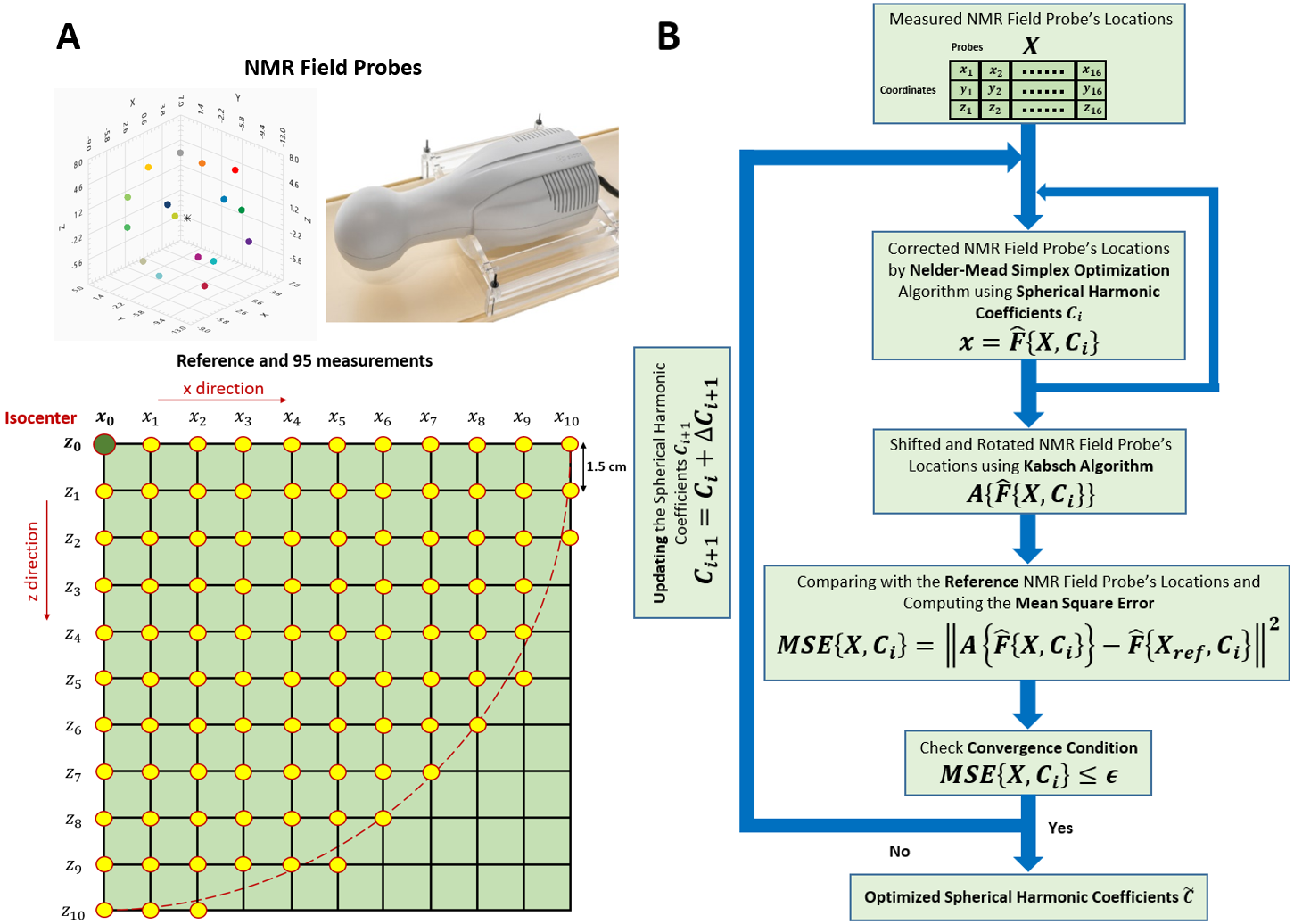
The Dynamic Field Camera (Skope, Zurich, Switzerland) was used to assess the GNL. It consists of 16 proton-based NMR field probes rigidly arranged within a probe head. Coordinates of the individual NMR field probes in the MRI frame of reference were measured for varying positions of the probe head in a 3T MAGNETOM PrismaFit (Siemens Healthineers, Erlangen, Germany) MR scanner. The first measurement was acquired in the isocenter, while subsequent 95 measurements were taken at positions with different shifts, as depicted in Figure 1.A, yielding 1696 = 1536 measurement points. The inability to align probe coordinates from 95 measurements to the first measurement using only translations and rotations reflects the GNL and was used in our algorithm to drive the optimization. The MRI-to-laboratory coordinate frame transformation is parameterized by SH expansion coefficients. On each iteration the current MRI-to-LAB transform is applied to all measured probe coordinates, thereafter the first probe head position is considered as a reference to which all other positions are aligned. An optimization algorithm iteratively updates SH coefficients to reduce the residual distances between the corresponding realigned probes. These optimized coefficients were then employed to correct the Fourier-reconstructed image of a custom grid phantom for evaluation.Let $$$X=f\{x,C\}$$$ represent the LAB-to-MRI transform parameterized by a chosen number of SH coefficients $$$C$$$. The size of $$$C$$$, 43 in our experiments, is determined by the order of the SH coefficients for all three gradients, while excluding certain parameters based on the symmetry considerations. In contrast to the direct transform, the MRI-to-LAB transform $$$x=\hat{F}\{X,C\}$$$ has no closed form representation and is solved in our proof-of-concept implementation using the Nelder-Mead Simplex optimization algorithm [4]. Next, we apply the Kabsh algorithm to translate and rotate corrected point coordinates to reference point coordinates: $$$A\{\hat{F}\{X,C\}\}$$$. We then calculate deviations in the coordinates of the probes compared to the reference probe: $$$MSE\{X,C\}=||A\{\hat{F}\{X,C\}\}-\hat{F}\{X_{ref},C\}||^2$$$, and use this information to update the SH coefficients: $$$C_{i+1}=C_{i}+ΔC_{i+1}$$$. This iterative process was performed in parallel on 96-CPUs until the error convergence (for~24h). An overview of the proposed algorithm is depicted in Figure 1.B. A link to the Matlab (MathWorks, Natick, USA) implementation can be found in the Acknowledgment. The optimized SH coefficients were then used to correct for distortions in obtained MR images. A PMMA grid phantom with a 5-mm channel filled with doped water was scanned with a 3D-GRE Pulseq [5] sequence in coronal orientation. (Nx=Nz=500, Ny=192, Δx=Δz=1mm, Δy=7mm).
Results
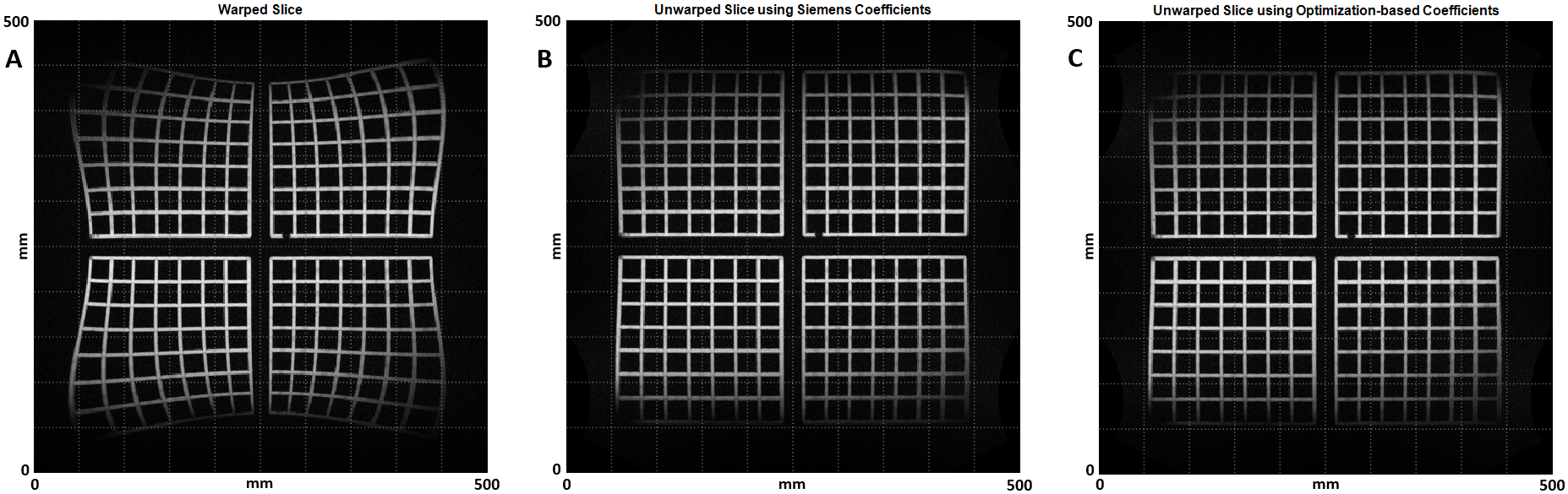
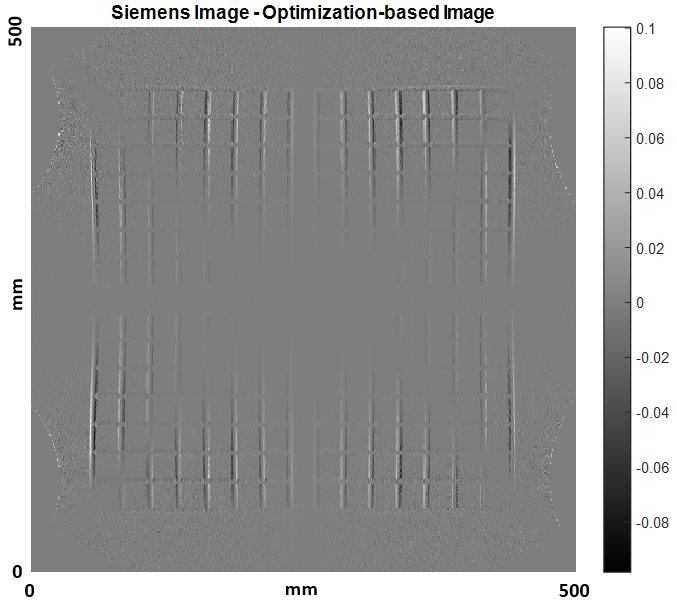
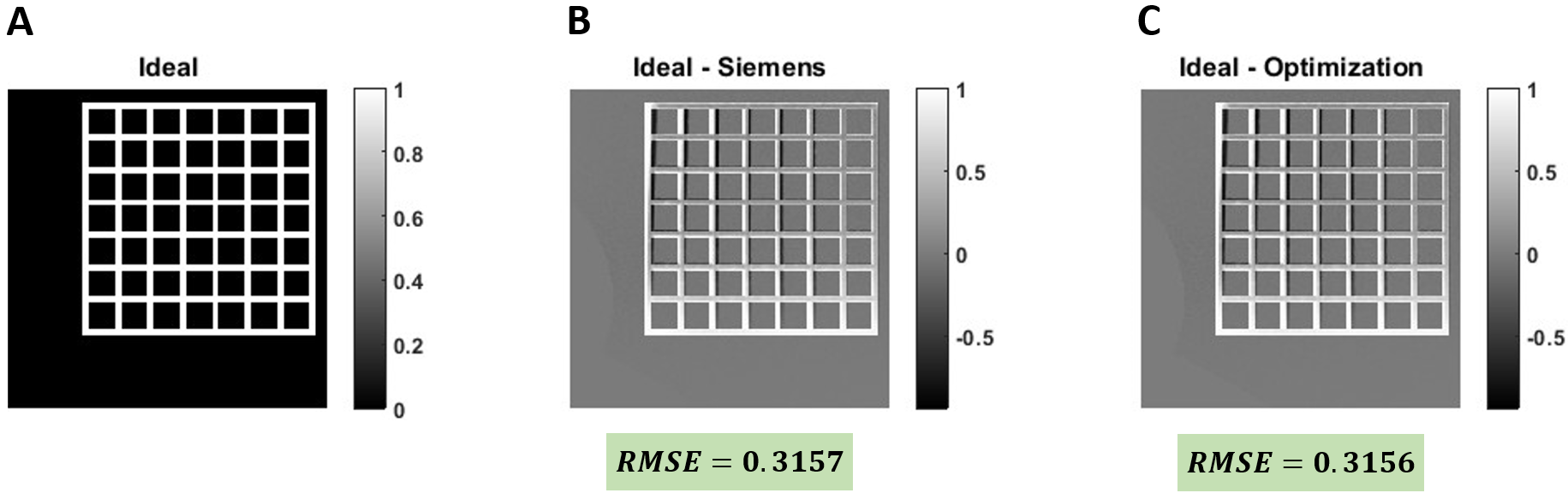
Warped image without GNL correction, unwarped image using the Siemens and optimization-based coefficients are illustrated in Figure 2.A, 2.B and 2.C, respectively. The difference between Siemens and optimization-based corrected images is represented in Figure 3. For a more precise comparison, an ideal phantom was simulated according to Figure 4.A and the difference between this phantom and Siemens and optimization-based corrected images are demonstrated in Figure 4.B and 4.C, respectively, along with the Root-Mean-Square-Error to compare the results quantitatively. Based on the results, the images corrected using this algorithm are geometrically comparable and slightly outperform the images corrected using Siemens-provided coefficients.Discussion
Our proposed method calibrates GNL without using dedicated phantoms, making it suitable for research sites equipped with Dynamic Field Camera or NMR probe array. This enables distortion correction in custom image reconstructions without the proprietary knowledge of gradient coil design. Future work includes optimizing probe head positions to streamline the calibration experiments and accelerating the numerical optimization algorithm.Conclusion
We have experimentally measured gradient distortion parameters by using an array of NMR field probes instead of a dedicated geometric phantom and used those parameters to reduce image distortions.Acknowledgements
This work was funded in part through the German Federal Ministry of Education and Research under grant number 13GW0356B. And in part through the National Institute of Health under grant Nr. NIH R01 EB032378 and NIH U24 NS120056. The author is responsible for the content of this publication. Frank Zijlstra and Marko Reisert for excellent debugging advise. The code to reproduce this work can be fund at: “https://github.com/Nikbert/gradient_nonlinearity_correction”.
References
[1] Tao, S., Trzasko, J.D., Gunter, J.L., Weavers, P.T., Shu, Y., Huston, J., Lee, S.K., Tan, E.T. and Bernstein, M.A., 2016. Gradient nonlinearity calibration and correction for a compact, asymmetric magnetic resonance imaging gradient system. Physics in Medicine & Biology, 62(2), p.N18.
[2] Trzasko, J.D., Tao, S., Gunter, J.L., Shu, Y., Huston, J., Weavers, P.T. and Bernstein, M.A., 2015. Phantom-based iterative estimation of MRI gradient nonlinearity. In Proceedings of the 23rd Annual Meeting of the ISMRM (p. 3735). Toronto, Canada: Proceedings of ISMRM.
[3] Aranovitch A, Haeberlin M, Gross S, Dietrich BE, Reber J, Schmid T, Pruessmann KP. Motion detection with NMR markers using real‐time field tracking in the laboratory frame. Magnetic resonance in medicine. 2020 Jul;84(1):89-102.
[4] Lagarias, J.C., Reeds, J.A., Wright, M.H. and Wright, P.E., 1998. Convergence properties of the Nelder--Mead simplex method in low dimensions. SIAM Journal on optimization, 9(1), pp.112-147.
[5] Layton et al. Pulseq: A rapid and hardware-independent pulse sequence prototyping framework. Magn Reson Med 2017;77:1544-1552.
Figures