4799
Accelerated 4D Flow MRI with Low-Rank Modeling and A Deep Generative Prior1Oden Institute for Computational Engineering & Sciences, University of Texas at Austin, Austin, TX, United States, 2Department of Biomedical Engineering, University of Texas at Austin, Austin, TX, United States
Synopsis
Keywords: Sparse & Low-Rank Models, Velocity & Flow
Motivation: Conventional 4D flow MRI provides valuable insights into blood flow but suffers from long scan times. Recent machine learning methods improve MRI reconstruction; however, they often require a large amount of training data to achieve desired performance.
Goal(s): This work is aimed to introduce a novel learning-based image reconstruction method to accelerate 4D flow MRI without using training datasets.
Approach: The proposed method integrates low-rank modelling with a deep generative prior by utilizing an untrained generative neural network to represent the spatial subspace of the model.
Results: The effectiveness of the proposed method has been demonstrated with in-vivo aortic 4D flow experiments.
Impact: This work introduced an innovative learning-based image reconstruction method for accelerating 4D flow MRI, which produces accurate velocity measurements even under high acceleration factor, all without the need for training datasets.
Introduction
4D flow MRI is a powerful imaging technique for both visualization and quantification of blood flow hemodynamics [1], facilitating the study of various vascular diseases. Despite the great potential, the clinical utility of 4D flow has been constrained by lengthy scan times. Numerous rapid imaging approaches, such as accelerated data acquisition techniques and image reconstruction methods, have been introduced to accelerate 4D flow MRI [2-5]. In recent years, multiple data-driven deep-learning-based methods have improved image reconstruction performance for 4D flow MRI [6, 7]. Nevertheless, these methods typically require a large amount of training data for desired reconstruction performance. In contrast to supervised learning, alternative unsupervised learning techniques, such as deep image prior (DIP) [8] and deep decoder [9], have demonstrated effectiveness without the need for additional training data, leveraging the inherent architecture of a deep convolutional network. In this work, we present a novel image reconstruction method, which combines a low-rank model with a deep generative prior to accelerate 4D flow MRI. We demonstrate the effectiveness of the proposed method with aortic flow experiments involving healthy subjects.Methods
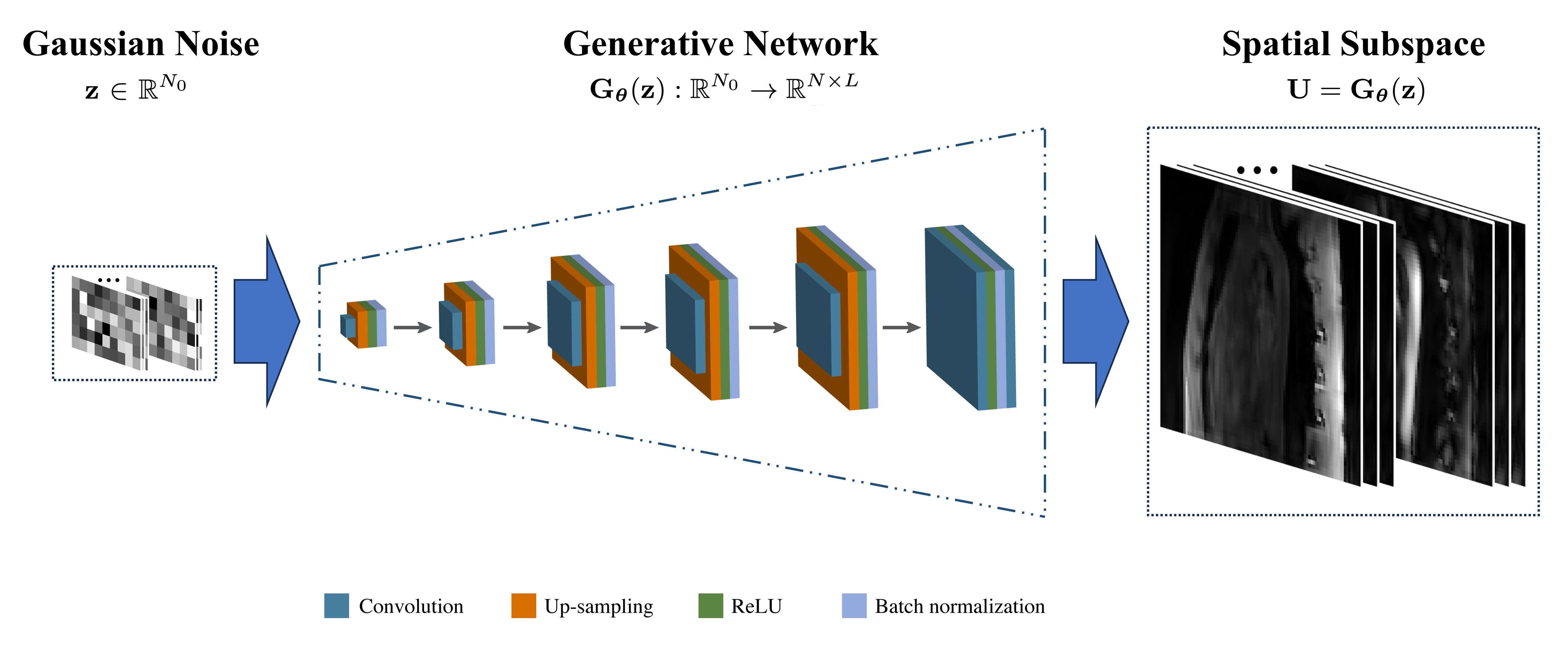
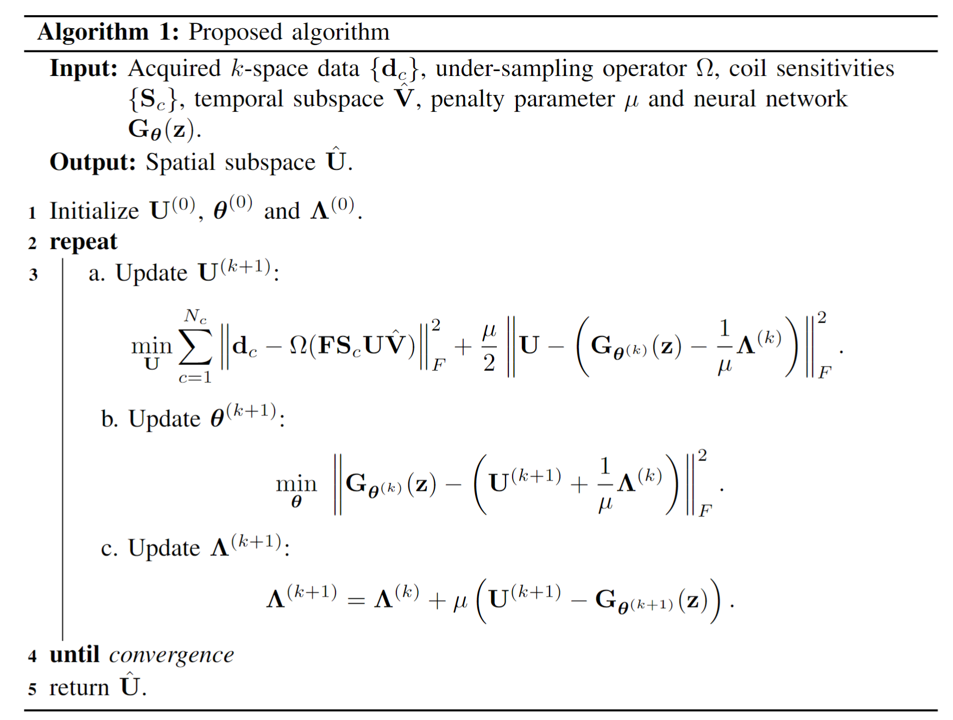
Exploiting the high spatiotemporal correlation among 4D flow imaging data with four velocity encodings, we first employ low-rank modeling for a joint Casorati matrix $$$\mathbf{C}= \left [ \mathbf{C}_{1}\,\, \mathbf{C}_{2}\,\, \mathbf{C}_{3}\,\, \mathbf{C}_{4}\, \right ]$$$ [10, 11], where each Casorati matrix $$$\mathbf{C}_{v} \in \mathbb{C}^{^{N \times M}}$$$ corresponds to a sequence of dynamic flow images for a specific velocity encoding. Then we apply matrix factorization to enforce an explicit low-rank constraint [12-14] on $$$\mathbf{C}$$$, i.e., $$$\mathbf{C}= \mathbf{U} \mathbf{V}$$$, where the temporal subspace $$$\mathbf{V} \in \mathbb{C}^{^{L \times M}}$$$ can be estimated via singular value decomposition based on the fully sampled central ($$$\boldsymbol{k}$$$, t)-space data, and the spatial subspace $$$\mathbf{U} \in \mathbb{C}^{^{N \times L}}$$$ can be subsequently determined by solving a linear least-squares problem. While the conventional low-rank modeling technique performs well at relatively low acceleration factors, it faces challenges with ill-conditioned model-fitting problems as the acceleration factor is high. To address this issue, we incorporate a deep generative prior by exploiting an untrained neural network to regularize the image reconstruction problem. Specifically, we introduce a spatial prior, i.e., $$$\mathbf{U}=\mathbf{G}_{\boldsymbol{\mathbf{\theta}}}\left ( \boldsymbol{\mathbf{z}} \right )$$$, where $$$\mathbf{G}_{\boldsymbol{\mathbf{\theta}}}\left ( \boldsymbol{\mathbf{z}} \right ): \mathbb{C}^{N_{0}}\rightarrow \mathbb{C}^{^{N \times L}}$$$ represents a generative neural network (as shown in Figure 1), $$$\mathbf{z} \in \mathbb{C}^{N_{0}}$$$ is a low-dimensional latent random vector, and $$$\boldsymbol{\theta}$$$ denotes the trainable parameters of this neural network. Accordingly, the image reconstruction problem can be formulated as follows: $$\min_{\mathbf{U}} \sum_{c=1}^{Nc}\|\mathbf{d}_{c} - \Omega(\mathbf{F}\mathbf{S}_c \mathbf{U} {\mathbf{V}} )\|_2^2,\\\textrm{s.t.} \quad \mathbf{U} = \mathbf{G}_{\boldsymbol{\theta}}(\mathbf{z}),$$ where $$$\mathbf{d}_{c}$$$ is the acquired data from the $$$c$$$th coil, $$$\Omega$$$ represents the sampling operator, $$$\mathbf{F}$$$ is the Fourier transform matrix, and $$$\mathbf{S}_{c}$$$ denotes the coil sensitivity map. To solve the above constrained non-convex optimization problem, we adopt an algorithm based on alternating direction method of multipliers (ADMM), as outlined in Figure 2.We evaluated the performance of the proposed method for aortic 4D flow MRI. Fully sampled data were acquired from three healthy volunteers on a 3.0T whole body scanner (Achieva, Philips Medical System, Best, The Netherlands) with a 32-channel cardiovascular coil. The following imaging parameters were used: FOV = 180×270×56 mm3 (FH/RL/AP), spatial resolution = 2.8×2.8×2.8 mm3 (FH/RL/AP), flip angle = 5°, number of cardiac phases = 24, VENC = 150 cm/s (FH/RL/AP).
Results
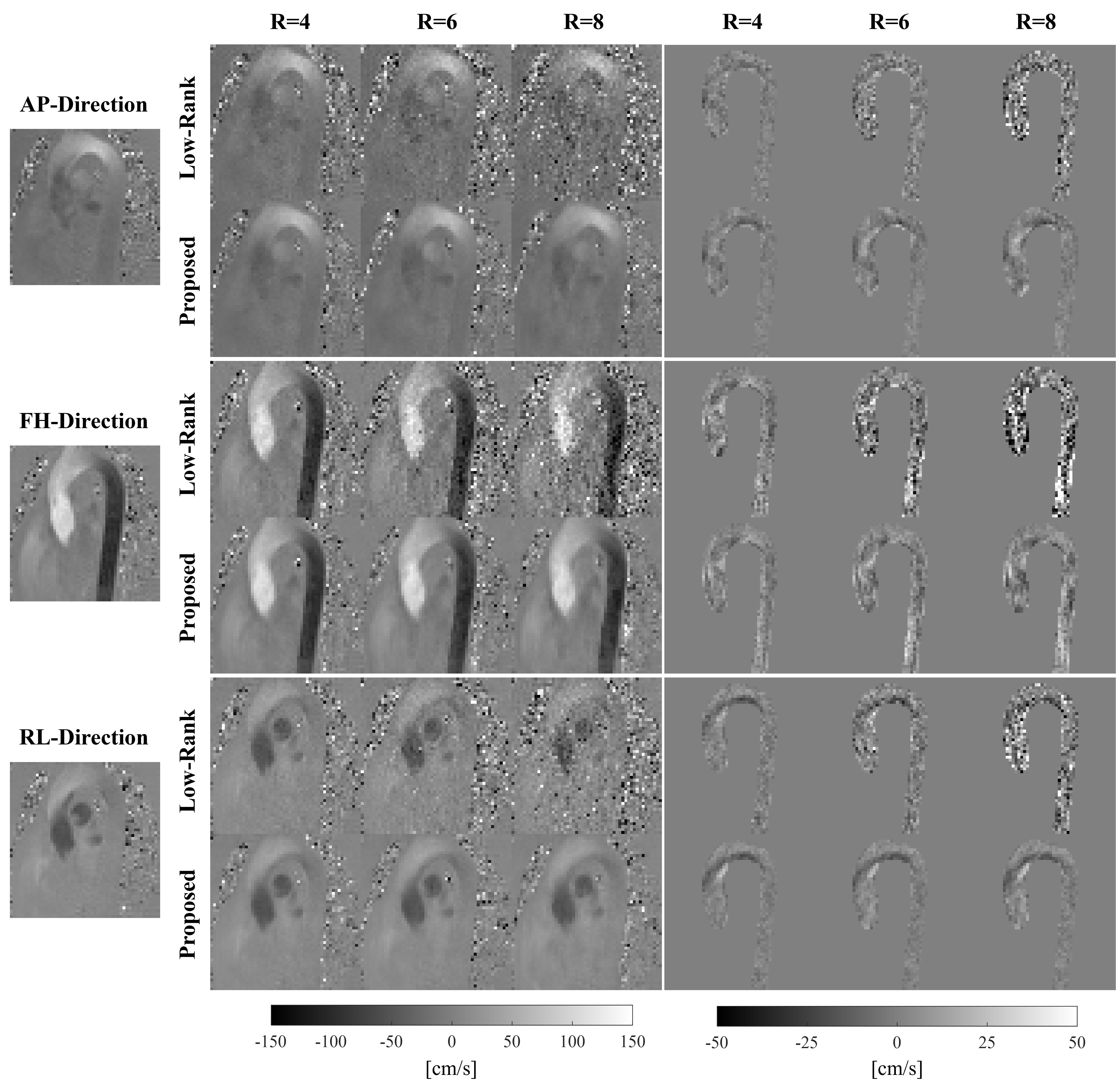
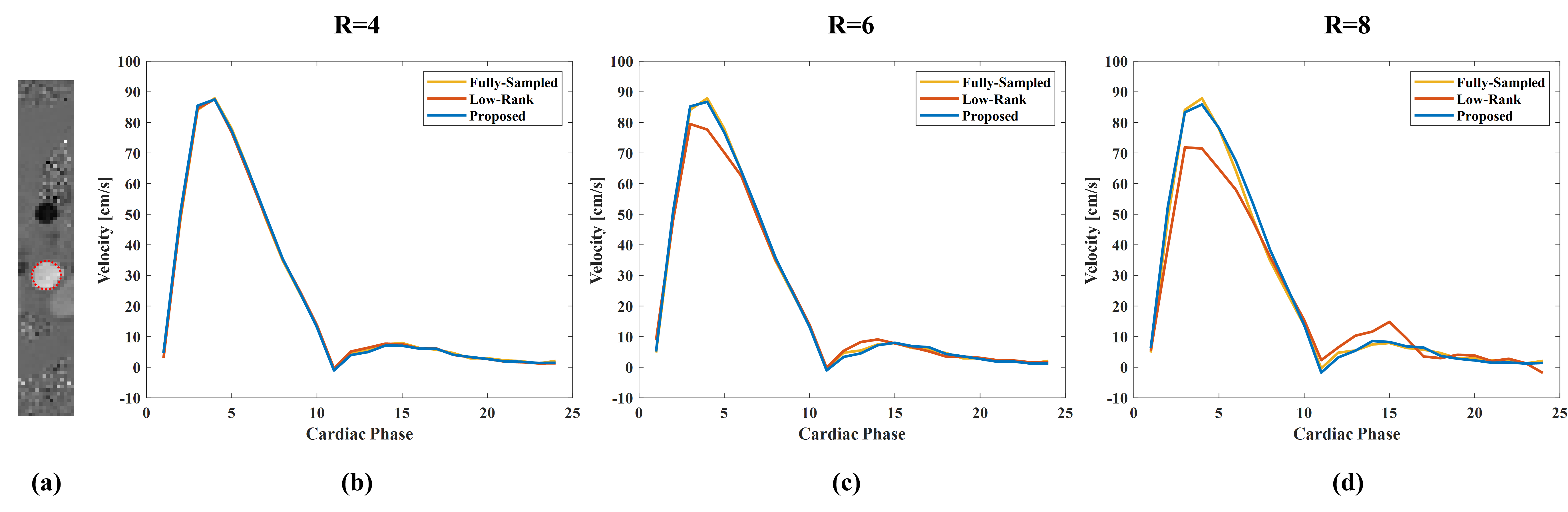
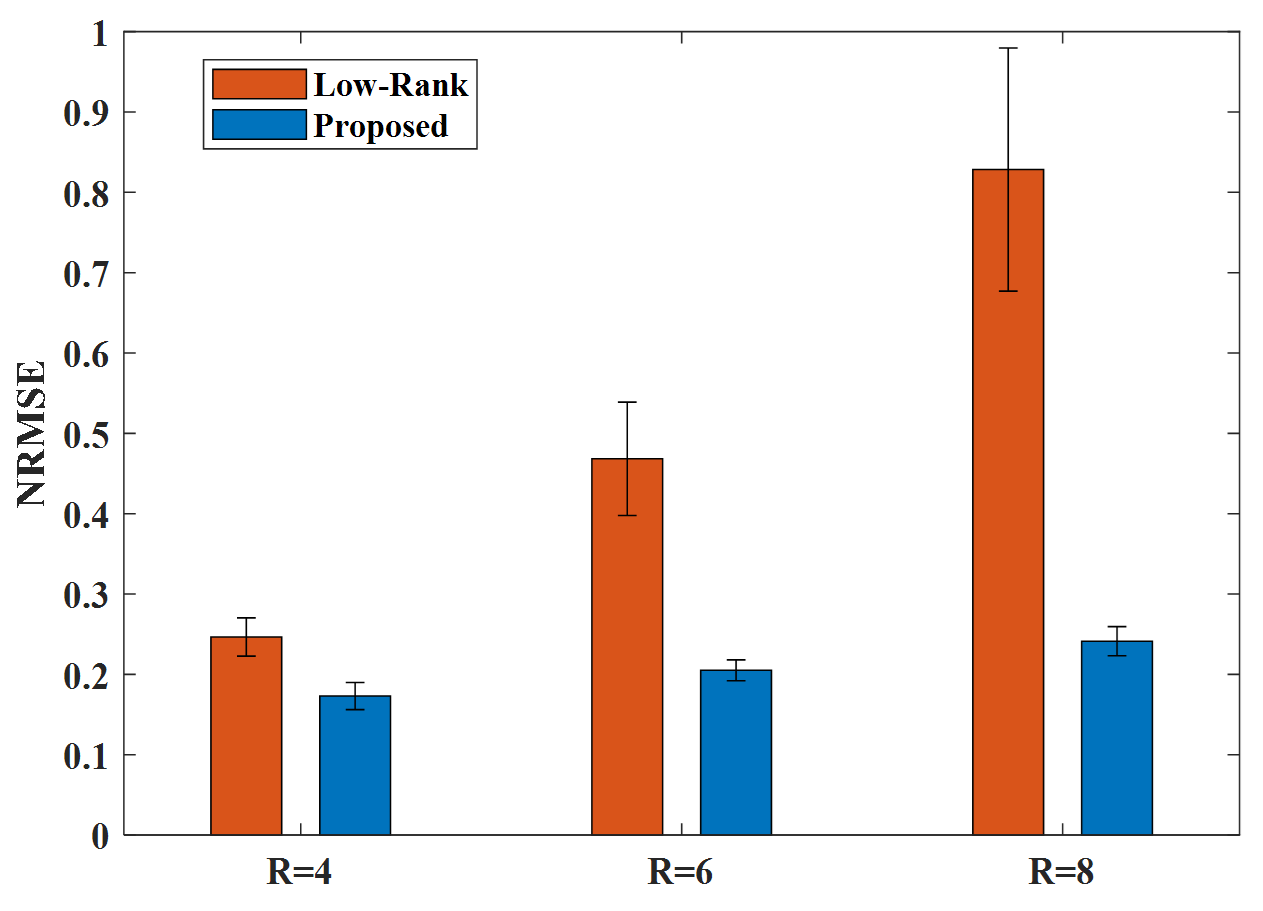
Figure 3 illustrates the reconstructed velocity maps of three directions at the systolic cardiac phase, as well as the associated error maps for three acceleration factors. Notably, the low-rank method exhibits substantial discrepancies, particularly at high acceleration factors, whereas the proposed method produces velocity maps with significantly reduced errors. Figure 4 shows the reconstructed velocity waveforms in the ascending aorta obtained from the fully sampled data and two reconstruction methods with varying acceleration factors. As can be seen, the low-rank method underestimates the peak velocity at high acceleration factors. In contrast, the proposed method yields more accurate velocity waveforms throughout the entire cardiac cycle. Furthermore, we calculated the normalized root-mean-square-error (NRMSE) for the reconstructed velocity vectors across all the three healthy subjects, and the results are shown in Figure 5. It is evident that the proposed method consistently outperforms the low-rank method in terms of deriving velocity vectors with significantly lower errors at different acceleration factors. This further demonstrates the effectiveness of the deep generative prior employed in the proposed method.Discussion and Conclusion
In this work, we developed a new learning-based image reconstruction method for accelerating 4D flow MRI by integrating low-rank modeling with a deep generative prior. We have demonstrated the efficacy of the proposed method through in-vivo experiments that do not require training datasets.Acknowledgements
This work was supported in part by the National Institutes of Health under Grant NIH-R00-EB027181.References
[1] Markl M, Frydrychowicz A, Kozerke S, Hope M, Wieben O. 4D flow MRI. J Magn Reson Imaging. 2012;36(5):1015-36.
[2] Sigfridsson A, Petersson S, Carlhäll CJ, Ebbers T. Four-dimensional flow MRI using spiral acquisition. Magn Reson Med. 2012;68(4):1065-73.
[3] Schnell S, Markl M, Entezari P, Mahadewia RJ, Semaan E, Stankovic Z, Collins J, Carr J, Jung B. k-t GRAPPA accelerated four-dimensional flow MRI in the aorta: effect on scan time, image quality, and quantification of flow and wall shear stress. Magn Reson Med. 2014;72(2):522-33.
[4] Sun A, Zhao B, Ma K, Zhou Z, He L, Li R, Yuan C. Accelerated phase contrast flow imaging with direct complex difference reconstruction. Magn Reson Med. 2017;77(3):1036-1048.
[5] Valvano G, Martini N, Huber A, Santelli C, Binter C, Chiappino D, Landini L, Kozerke S. Accelerating 4D flow MRI by exploiting low-rank matrix structure and hadamard sparsity. Magn Reson Med. 2017;78(4):1330-1341.
[6] Vishnevskiy V, Walheim J, Kozerke S. Deep variational network for rapid 4D flow MRI reconstruction. Nat Mach Intell. 2020;2(4):228–235.
[7] Nath R, Callahan S, Stoddard M, Amini AA. FlowRAU-Net: Accelerated 4D flow MRI of aortic valvular flows with a deep 2D residual attention network. IEEE Trans Biomed Eng. 2022;69(12):3812-3824.
[8] Ulyanov D, Vedaldi A, and Lempitsky V. Deep image prior. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR). 2018:9446-9454.
[9] Heckel R and Hand P. Deep decoder: Concise image representations from untrained non-convolutional networks. Proceedings of International Conference on Learning Representations. 2019.
[10] Sun A, Zhao B, Li Y, He Q, Li R, Yuan C. Real-time phase-contrast flow cardiovascular magnetic resonance with low-rank modeling and parallel imaging. J Cardiovasc Magn Reason. 2017;19(1):1-13.
[11] Sun A, Zhao B, Zheng Y, Long Y, Wu P, Wang B, Li R, Wang H. Motion-resolved real-time 4D flow MRI with low-rank and subspace modeling. Magn Reson Med. 2023;89(5):1839-1852.
[12] Liang ZP. Spatiotemporal imaging with partially separable functions. Proceedings of IEEE International Symposium on Biomedical Imaging. 2007:988-991.
[13] Zhao B, Haldar JP, Christodoulou AG, Liang ZP. Image reconstruction from highly undersampled (k, t)-space data with joint partial separability and sparsity constraints. IEEE Trans Med Imaging. 2012;31:1809-1820.
[14] Christodoulou AG, Zhang H, Zhao B, Hitchens TK, Ho C, Liang ZP. High-resolution cardiovascular MRI by integrating parallel imaging with low-rank and sparse modeling. IEEE Trans Biomed Eng. 2013;60(11):3083-92.
Figures