4784
Repeatability and reproducibility report on a novel gravitational MR Elastography device1MR Application Predevelopment, Siemens Healthineers AG, Shenzhen, China, 2MR Application Predevelopment, Siemens Healthineers AG, Erlangen, Germany, 3School of Biomedical Engineering and Imaging Sciences, King’s College London, London, United Kingdom, 4Laboratory for Vascular Translational Science, INSERM U1148, Paris, France, 5Quality Electrodynamics LLC, Mayfield, OH, United States
Synopsis
Keywords: Elastography, Elastography, MRE, Liver, Stiffness, Repeatability, Reproducibility
Motivation: We want contribute to establish MR Elastography as a reliable imaging technique for liver characterization.
Goal(s): To validate the repeatability and reproducibility of a novel, gravitational hepatic MRE system using a generalized multi-shot GRE-MRE sequence.
Approach: 57 health volunteers underwent 2D and 3D hepatic MRE scans on a 3T Siemens scanner. The repeatability was evaluated through repeated volunteer scans without repositioning, while reproducibility was performed by re-positioning the volunteer after each acquisition.
Results: The repeatability and reproducibility coefficients of 2D-MRE were 0.11, 0.20 and for 3D-MRE, 0.21, 0.24, respectively. Repeatability and reproducibility for the 2D-MRE to 3D-MRE cases were 0.44 and 0.45, respectively.
Impact: We evaluated a new MRE system provides sufficient mechanical vibration which results in high repeatability and reproducibility. This, in combination with the fast GRE-MRE sequence providing sufficient SNR and PNR, serves as a valuable solution.
Introduction
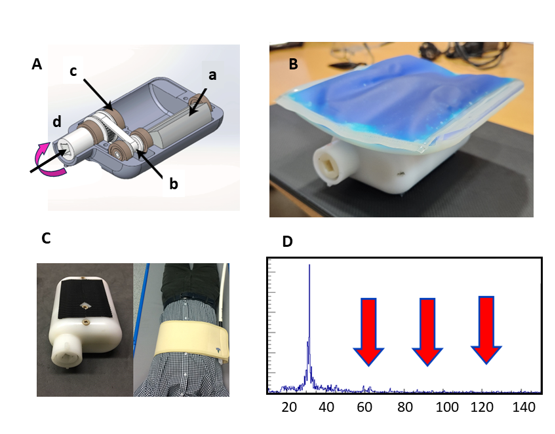
Magnetic Resonance Elastography (MRE) provides an estimation of the stiffness of soft tissues1 and is valuable for the assessment of liver fibrosis. In this study, we employ a novel MRE device based on a gravitational transducer concept2-6, shown in Figure1, together with a generalized multi-shot GRE-MRE Sequence (Ristretto MRE)7-8. Unlike other existing solutions that generate mono-frequency vibration by employing a pneumatic unit connected to a passive acoustic driver, the gravitational device generates vibrations by rotating an eccentric mass inside the transducer. It produces a sharp frequency spectrum due to the vibration amplitude independent of the frequency (Figure1(D))7, resulting in enhanced image quality. The Ristretto sequence is GRE-based and incorporates fractional encoding scheme, resulting in time savings of approximately 3 to 4-fold8-9. Furthermore, it provides feasible phase-to-noise ratio and flexible TR/TE times compared to common GRE based sequence. Moreover, this sequence enables 3D MRE exams within four breathholds, which yields more robust and accurate results10. This study aims to validate the aforementioned system on human volunteers by evaluating its repeatability and reproducibility.Method
This study included 57 healthy volunteers (9 females) without known liver disease. The average BMI was 24.6 (range 18.56 to 44.44). Imaging was performed using 2D-MRE and 3D-MRE protocols on a 3T scanner (MAGNETOM Vida, Siemens Healthineers, Erlangen, Germany). To assess repeatability, the scans were repeated consecutively two times without repositioning the volunteers. To assess reproducibility, the scans were repeated two times with a break in between where the volunteers were asked to get up and move and were then repositioned in the scanner. In total, 456 scans were acquired. The 2D Ristretto sequence encodes the wave field within the liver along the z-direction, depicting the wave-field in a 96x78x4 encoding matrix with resolution 3mmx3mmx8mm and 4 slices. TE=7.38,TR=45.87ms. The scan was completed within a single breath-hold. The 3D Ristretto sequence encodes the wave field along the x, y and z-directions. The encoding matrix is 96x78x4 with resolution 3mmx3mmx3.5mm and 8 slices. With GRAPPA acceleration factor 2, the acquisition was done in 4 breath-holds. The inversion method for data reconstruction employed is detailed in reference11. In addition, the nonlinearity of the waves was used to evaluate the quality of the MRE scans.Results
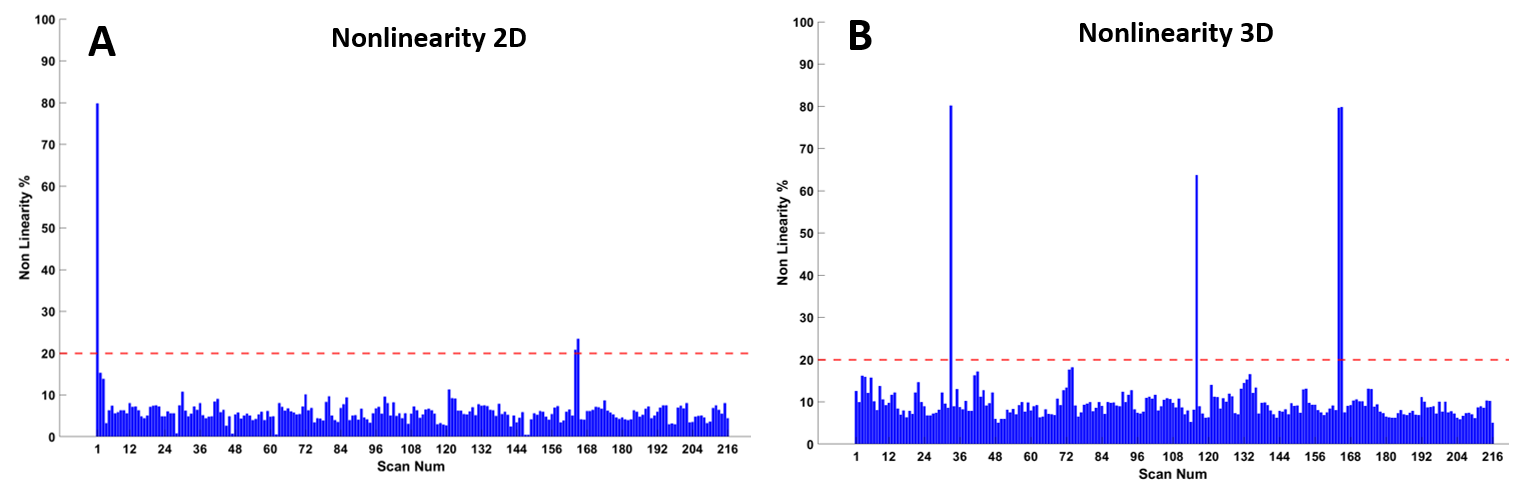
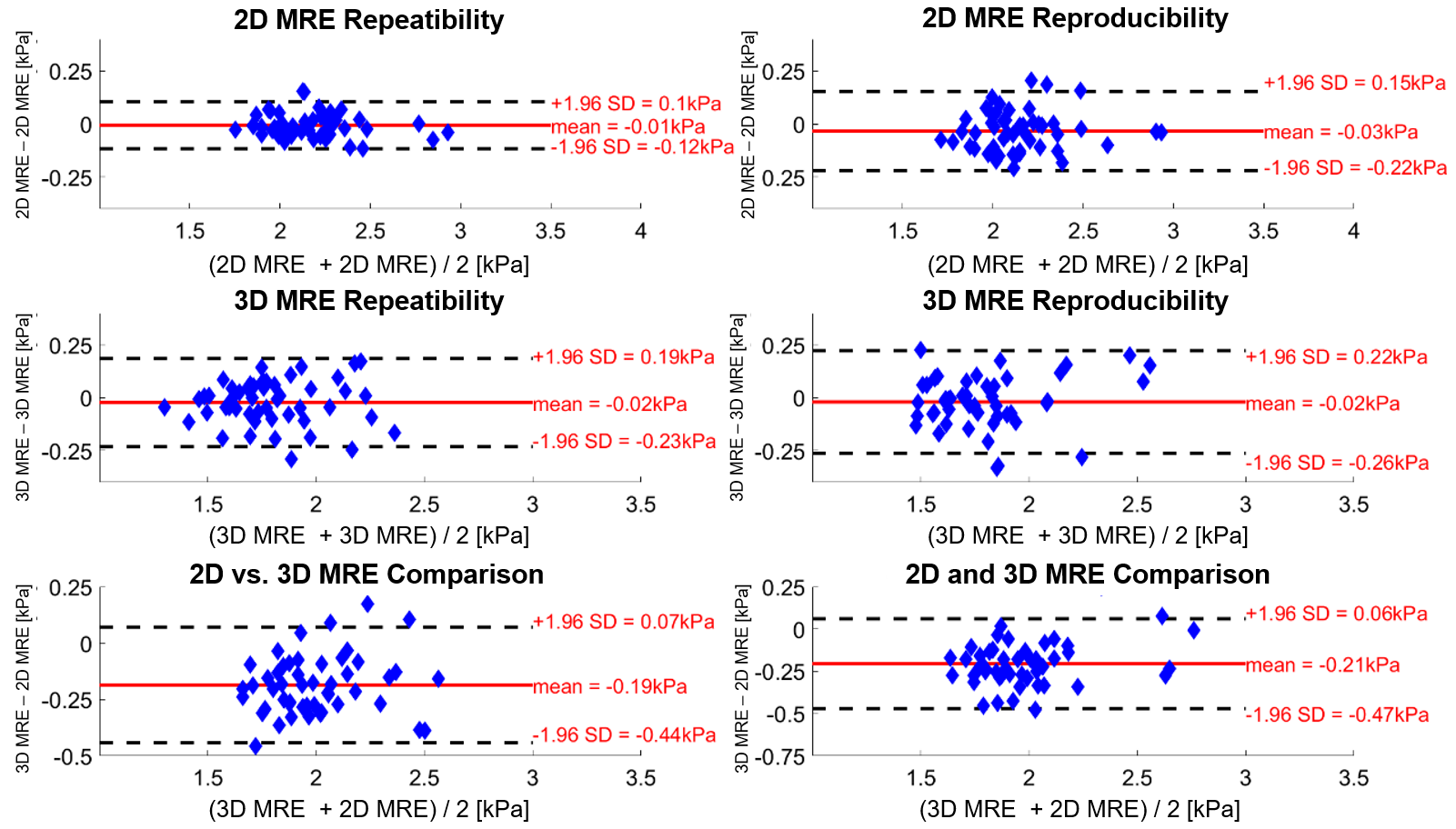
Figure2 shows the nonlinearity of all 2D and 3D MRE scans. All values were below 20%, which is considered as good MRE data quality, except for three 2D and four 3D-MRE scans. This reflects a total failure ratio of only 4%. The repeatability coefficients (RCs) of the 2D scans were 0.11 and 0.20 for the repeatability and reproducibility experiments, respectively, and the coefficients of variation (CVs) were 4.0% and 7.1% (Figure 3). The RCs of 3D scans were 0.21 and 0.24, and the CVs were 7.6% and 8.7%. The RCs between 2D and 3D were 0.44 and 0.46, and the CVs were 16% for both repeatability and reproducibility. The Bland-Altman plot shows a bias of -0.19kPa.Discussion
The repeatability and reproducibility coefficients were consistent with results from a previous report employing GRE (2D) and SE-EPI (3D) MRE sequences using an acoustic driver12. The reported RCs of 2D and 3D demonstrated robust repeatability and reproducibility of the sequence and the MRE device. A bias of 0.19kPa was observed between 2D and 3D stiffness, with the stiffness of 2D scans being higher than that of 3D scans. This means the 2D scans overestimate stiffness., which could potentially be attributed to the oblique propagation of the share waves within the organ, in alignment with the motion encoding direction13,14, leading to higher observed stiffness values. Additionally, the overestimation could also be caused by the parameter optimization employed in the 2D inversion process.Conclusion
This study in healthy adult volunteers using the novel MRE system based on a gravitational transducer and the Ristretto MRE sequence showed good repeatability and reproducibility for application in the liver.Acknowledgements
No acknowledgement found.References
1. Muthupillai R, Lomas DJ, Rossman PJ, Greenleaf JF, Manduca A, Ehman RL. Magnetic resonance elastography by direct visualization of propagating acoustic strain waves. Science 1995;269(5232):1854-1857.
2. Huwart L, Sempoux C, Vicaut E, Salameh N, Annet L, Danse E, Peeters F, ter Beek LC, Rahier J, Sinkus R, Horsmans Y, Van Beers BE. Magnetic resonance elastography for the noninvasive staging of liver fibrosis. Gastroenterology 2008;135(1):32-40.
3. Sack I, Rump J, Elgeti T, Samani A, Braun J. MR elastography of the human heart: noninvasive assessment of myocardial elasticity changes by shear wave amplitude variations. Magn Reson Med 2009;61(3):668-677.
4. Asbach P, Klatt D, Hamhaber U, Braun J, Somasundaram R, Hamm B, Sack I. Assessment of liver viscoelasticity using multifrequency MR elastography. Magn Reson Med 2008;60(2):373-379.
5. Bernstein MA, King KF, Zhou XJ. Handbook of MRI pulse sequences: Elsevier; 2004.
6. Yin M, Talwalkar JA, Glaser KJ, Manduca A, Grimm RC, Rossman PJ, Fidler JL, Ehman RL. Assessment of hepatic fibrosis with magnetic resonance elastography. Clin Gastroenterol Hepatol 2007;5(10):1207-1213 e1202.
7. Runge JH, Hoelzl SH, Sudakova J, Dokumaci AS, Nelissen JL, Guenthner C, Lee J, Troelstra M, Fovargue D, Stoker J, Nederveen AJ, Nordsletten D, Sinkus R. A novel magnetic resonance elastography transducer concept based on a rotational eccentric mass: preliminary experiences with the gravitational transducer. Phys Med Biol 2019;64(4):045007.
8. Guenthner C, Sethi S, Troelstra M, Dokumaci AS, Sinkus R, Kozerke S. Ristretto MRE: A generalized multi-shot GRE-MRE sequence. NMR Biomed 2019;32(5):e4049.
9. Garteiser P, Sahebjavaher RS, Ter Beek LC, Salcudean S, Vilgrain V, Van Beers BE, Sinkus R. Rapid acquisition of multifrequency, multislice and multidirectional MR elastography data with a fractionally encoded gradient echo sequence. NMR Biomed 2013;26(10):1326-1335.
10. Forsgren MF, Noren B, Kihlberg J, Dahlqvist Leinhard O, Kechagias S, Lundberg P. Comparing hepatic 2D and 3D magnetic resonance elastography methods in a clinical setting - Initial experiences. Eur J Radiol Open 2015;2:66-70.
11. Sinkus R, Tanter M, Xydeas T, Catheline S, Bercoff J, Fink M. Viscoelastic shear properties of in vivo breast lesions measured by MR elastography. Magn Reson Imaging 2005;23(2):159-165.
12. Wang K, Manning P, Szeverenyi N, Wolfson T, Hamilton G, Middleton MS, Vaida F, Yin M, Glaser K, Ehman RL, Sirlin CB. Repeatability and reproducibility of 2D and 3D hepatic MR elastography with rigid and flexible drivers at end-expiration and end-inspiration in healthy volunteers. Abdom Radiol (NY) 2017;42(12):2843-2854.
13. Hamhaber U, Sack I, Papazoglou S, Rump J, Klatt D, Braun J. Three-dimensional analysis of shear wave propagation observed by in vivo magnetic resonance elastography of the brain. Acta Biomater 2007;3(1):127-137.
14. Shi Y, Glaser KJ, Venkatesh SK, Ben-Abraham EI, Ehman RL. Feasibility of using 3D MR elastography to determine pancreatic stiffness in healthy volunteers. J Magn Reson Imaging 2015;41(2):369-375.
Figures