4653
Prospective motion correction with 3D Orbital Navigators for robust and rapid susceptibility weighted imaging1German Center for Neurodegenerative Diseases (DZNE), Bonn, Germany, 2Institute for Biomedical Engineering, ETH Zurich and University of Zurich, Zurich, Switzerland, 3Commissariat à l’Energie Atomique, CNRS, NeuroSpin, BAOBAB, Université Paris-Saclay, Gif sur Yvette, France, 4Department of Physics and Astronomy, University of Bonn, Bonn, Germany
Synopsis
Keywords: Motion Correction, Motion Correction
Motivation: The quality of susceptibility weighted images may deteriorate under subject motion, especially at high fields, impairing further data analysis.
Goal(s): To mitigate motion artifacts through prospective motion correction(PMC) by employing 3D orbital navigators and real-time processing of a linear perturbation model.
Approach: Orbital navigators were integrated into a high-resolution 3D EPI sequence for rapid susceptibility-weighted imaging at 7T, and a real-time motion estimation pipeline was established. The impact of prospective correction for large instructed motion on the resulting images was investigated.
Results: Prospective motion correction successfully preserved the image quality of susceptibility weighted images, yielding results comparable to a scan without instructed motion.
Impact: The improvements in image quality of the susceptibility weighted images underline the high potential of a linear perturbation model with Orbital Navigators for precise and rapid prospective motion correction in ultra-high field gradient echo imaging and potentially many more applications.
Introduction
Head motion is a major challenge for susceptibility weighted imaging (SWI) at high fields. When aiming for high resolutions, even small involuntary motions can degrade image quality – particularly at long TE optimal for SWI – and impede further analysis. Orbital Navigators (Onavs) with a linear perturbation model have been shown to be a promising prospective motion correction (PMC) method for highly precise and rapid geometry updates with minimal calibration[1]. Here, Onavs have been integrated into a high-resolution 3D-EPI gradient echo sequence. Although such fast acquisitions reduce the impact of intra-scan motion, images can still suffer due to the multi-shot acquisition, especially if large or sudden movements occur during scanning. This work demonstrates the benefit of the Onavs PMC method for SWI.Methods
A navigator trajectory[1,2] (k-space radius = 400 rad/m, TA = 2.3 ms) was integrated into a segmented whole-brain 3D-EPI [3] (0.6 mm3, FOV = 240 x 240 x 156 mm, 2 volumes, TR-shot = 40 ms, TAvol = 52s, 2x2z1 skipped-CAIPI with segmentation factor 10, EPI factor = 20, TE = 22 ms) right after the water-selective excitation pulse. A short pre-scan consisting of a reference navigator and three rotated navigators was acquired to calibrate a linear perturbation model[1]. Due to the limited linearity of this model for large motions, the navigator predictions were used to update its gradients and demodulation frequency to stay in the frame of reference during prospective motion correction[2]. The navigator data was sent in real-time to a server, which was used for processing the data in order to calibrate the model first (~ 60 ms) and subsequently sent motion updates to the scanner. The scan geometry was updated in real-time[4] before every EPI shot and the processing on the server was fast enough (~ 3 ms) to apply motion updates in every shot. One healthy subject was scanned at a MAGNETOM 7T Plus scanner (Siemens Healthineers, Erlangen, Germany) equipped with a 32 channel Rx (1Tx) head coil (Nova Medical Inc, Wilmington, Delaware). The subject was instructed to keep the head still during the first volume acquisition and to move the head slightly at a certain time in the subsequent volume acquisition (approximately during k-space center acquisition). This experiment was repeated with and without PMC. For a rough estimation of the noise standard deviation of the motion parameters, the volume with small involuntary motions was high-pass filtered (5 Hz). For each case, SWIs were calculated from the online reconstructed magnitude and phase images using the CLEAR-SWI method[5]. Subsequently, minimum intensity projections (MIP) across 12 sagittal slices (7.2mm) were computed.Results
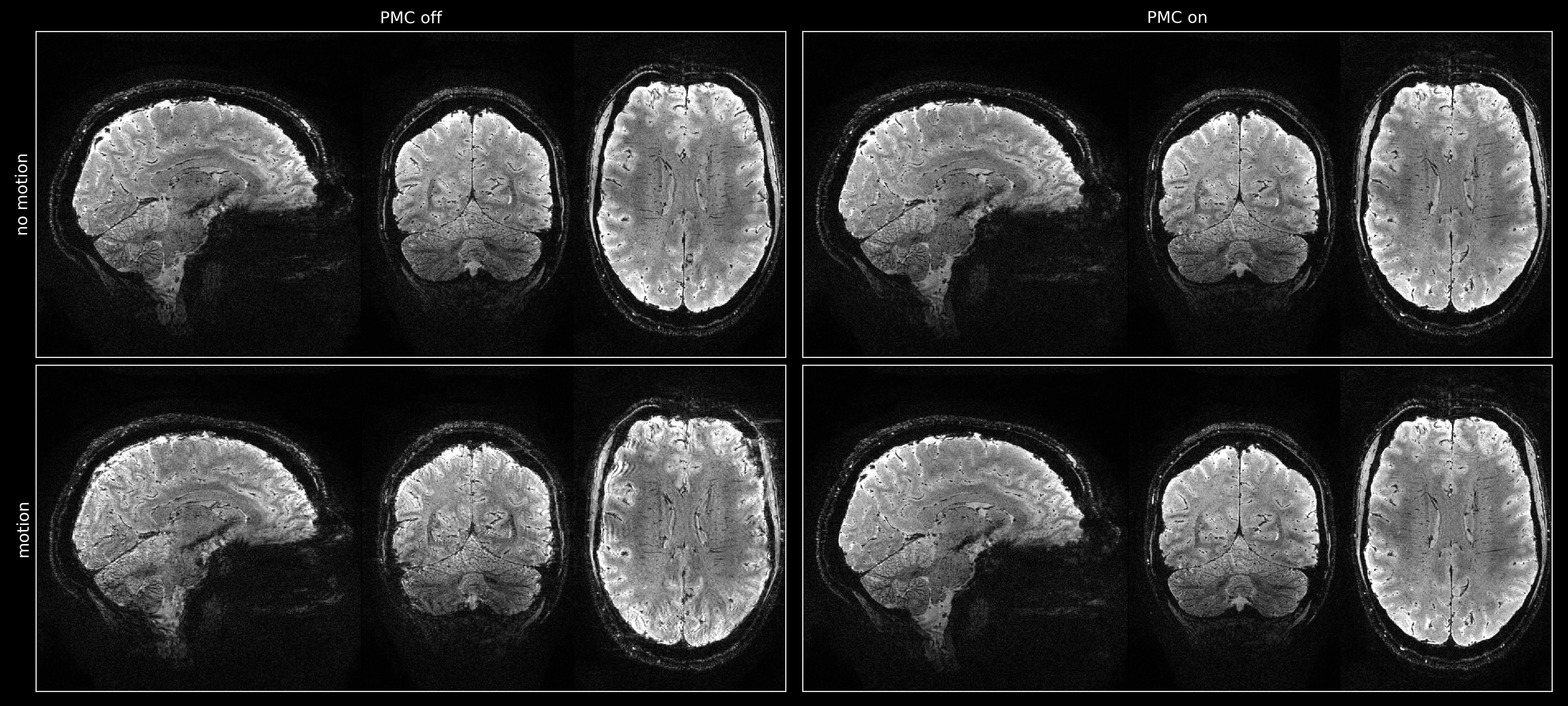
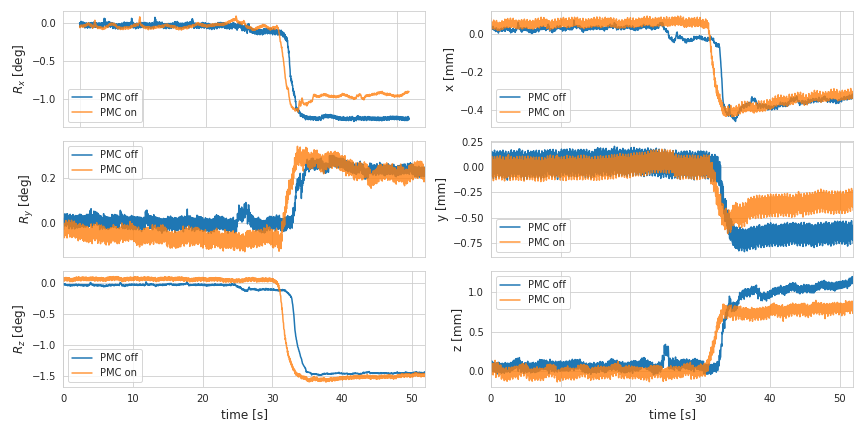
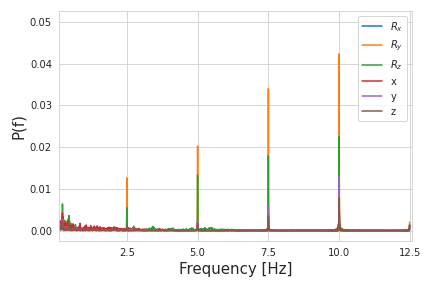
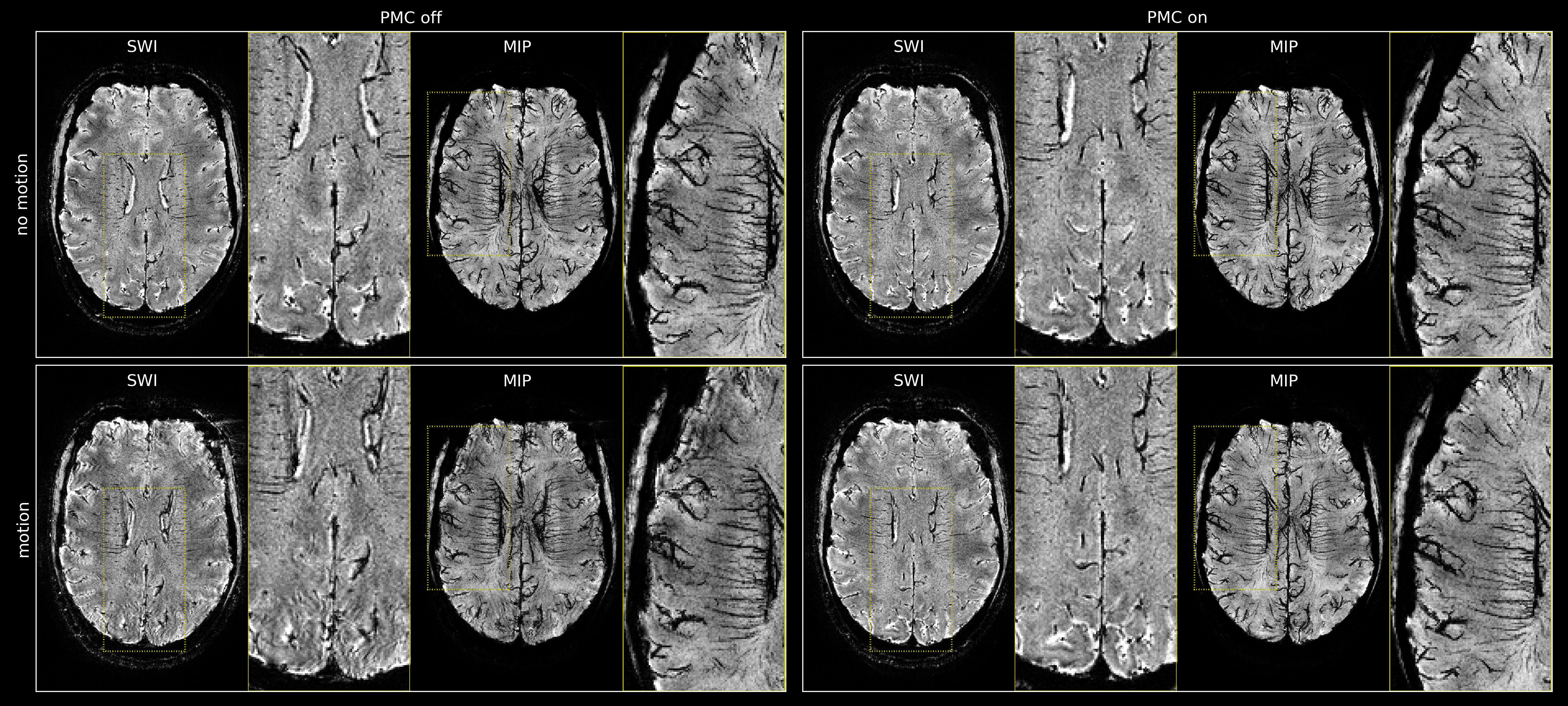
Fig. 1 compares the prospectively corrected magnitude images to its uncorrected counterparts without (top) and with (bottom) instructed motion. The image quality is not degraded by PMC when the subject holds still. However, it significantly improves for the motion case. Fig. 2 shows motion trajectories for the corrected and uncorrected scan, demonstrating that the instructed motion was similar in both scans. The motion parameter noise was in the order of 18 mdeg and 50 µm. Figure 3 shows the frequency spectrum of the motion parameters. The peaks appear at 2.5 Hz and at higher harmonics for all motion parameters.Fig. 4 shows axial views of the SWIs and the derived MIPs for all cases. The two times magnified views highlight particularly strong motion artifacts and their mitigation by PMC.
Discussion and Conclusion
The reduction in motion artifacts in both magnitude and SWI images underlines that employing 3D Orbital Navigators with a linear perturbation model is an appropriate motion correction method for high-resolution EPI. Although the navigator was not updated during the uncorrected scan, motion parameters between both experiments show high similarity, indicating that the linear range of the model was not exceeded. The precision in the motion updates is reduced by apparent noise that is, however, not purely random but seems to be dominated by eddy currents (repeating with the in-plane segmentation factor every 400ms). Such eddy currents can be corrected for in the future to achieve single-digit µm precision, as previously reported for this method[2]. Since Onavs have also proven to be capable of measuring and correcting B0 fields up to the 1st order[6], image quality could be further increased by implementing dynamic shimming which would be especially useful in SWI applications and other long TE scans. In conclusion, this work demonstrates the benefit of PMC with an Onav-based linear perturbation model for SWI applications.Acknowledgements
This work received financial support from the European Union Horizon 2020 Research and Innovation program under grant agreement 885876 (AROMA).References
[1] Ulrich T, Pruessmann KP. Detection of Head Motion using Navigators and a Linear Perturbation Model. In: Proceedings of the 2021 ISMRM & SMRT Annual Meeting & Exhibition. Virtual Event; 2021.
[2] Ulrich T, Riedel M, Pruessmann KP. K-space navigators with linear control: Step response, precision and reference options. In: Proceedings of the ISMRM Workshop on Motion Detection & Correction. Oxford, England, UK; 2022.
[3] Stirnberg, R. et al., Segmented K-space blipped-controlled aliasing in parallel imaging for high spatiotemporal resolution EPI. MRM 85.3 (2021): 1540-1551.
[4] Zaitsev M et al., Magnetic resonance imaging of freely moving objects: prospective real-time motion correction using an external optical motion tracking system. Neuroimage (2006) 31:1038-50.
[5] Eckstein, K. et al., Improved Susceptibility Weighted Imaging at Ultra-High Field Using Bipolar Multi-Echo Acquisition and Optimized Image Processing: CLEAR-SWI. NeuroImage 237 (August 15, 2021): 118175.
[6] Riedel M, Ulrich T, Pruessmann KP. Real-time correction of rigid motion and 1st-order shims using rapid 3D orbital navigators. In: Proceedings of the 2023 ISMRM & SMRT Annual Meeting & Exhibition; 2023
Figures