4432
Improved 3D-EPI with motion and FID-navigated field correction1Radiology, Harvard Medical School, Boston, MA, United States, 2Computational Radiology Laboratory, Boston Children's Hospital, Boston, MA, United States, 3Siemens Medical Solutions USA, Inc., Boston, MA, United States, 4Advanced Clinical Imaging Technology, Siemens Healthcare International AG, Lausanne, Switzerland, 5Radiology, Lausanne University Hospital and University of Lausanne, Lausanne, Switzerland, 6LTS5, Ecole Polytechnique Fédérale de Lausanne, Lausanne, Switzerland
Synopsis
Keywords: Artifacts, Neuro
Motivation: Previous studies have demonstrated field correction with 3D-EPI for fMRI and SWI, but ideal correction would account for both field inhomogeneities and motion.
Goal(s): We aimed to investigate the limits of simultaneous motion and field correction with 3D-EPI.
Approach: Our approach was to acquire in vivo data with controlled head motion. Volunteers were directed to rotate their heads 4-8 degrees and move left/right during scanning. We performed correction for field inhomogeneities using FID navigators after rigid motion registration.
Results: Analysis across varying rotation degrees showed the ability to successfully correct both motion and field distortions in 3D-EPI using FID navigators.
Impact: This simultaneous motion and field correction technique could enable high-resolution artifact-free 3D-EPI for fMRI studies. By correcting head motion and field inhomogeneities concurrently, the approach opens possibilities for investigating new research questions dependent on artifact-free imaging with substantial subject motion.
Introduction
FID navigators have been utilized for real-time measurement of spatiotemporal B0 field changes, with retrospective correction enhancing image quality, especially in the presence of significant B0 field modulations such as deep breathing at 7T [1]. Motion-induced alterations in the B0 field introduce additional artifacts, particularly in susceptibility-weighted contrast imaging [2]. Correcting for motion without accounting for related B0 effects proves inadequate, especially in scans sensitive to susceptibility artifacts. While previous studies demonstrated FIDnavs' effectiveness in estimating and correcting rigid-body motion in MRI scans [3], inhomogeneities in external and subject-specific fields may influence FIDnavs, impacting derived motion measurements. In this study, we explored whether FID navigators could measure and rectify motion-related field changes when external motion information is available. We employed a 3D EPI sequence [4,5] previously employed in FID-navigated fMRI [6] and SWI studies [7].Methods
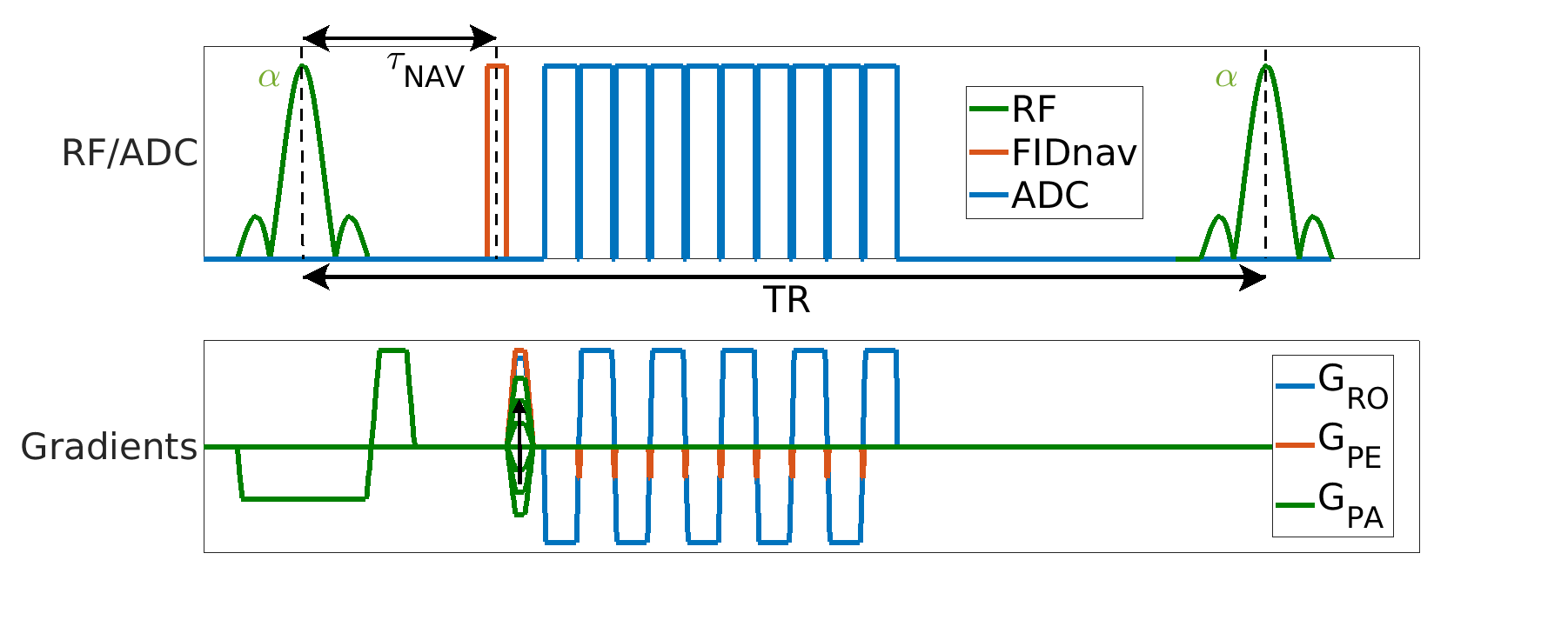
TheoryAn FIDnav module with a duration of 0.4 ms was inserted after each slab-selective excitation pulse of a multi-shot 3D EPI sequence as shown in Figure 1. Two low-resolution calibration scans with reversed gradient polarities were used to create a forward model of FIDnav signal changes [1]. This model used a B field map that was approximated using zeroth- and first-order 3D spherical harmonic functions with four coefficients. For image reconstruction, the corrected k-space positions were reconstructed with an iterative nonuniform FFT (NUFFT) algorithm [8].
Motion Experiments
In our study, scans were conducted on a phantom and two volunteers using a similar motion paradigm. Five volumes were acquired with an FID-navigated 3D EPI sequence, where a single motion event (rotation) was induced in the middle of the second and fourth volumes. Motion information between the first, third, and fifth reconstructed volumes was measured by rigid registration toolkit (ITK) [9]. Field information was calculated using the forward model described previously by Wallace et al. [1].
Phantom Study
An ADNI phantom was scanned at 3T (MAGNETOM Prisma, Siemens Healthcare, Erlangen, Germany) using a 20-channel head/neck coil. The imaging protocol consisted of two low-resolution calibration scans (with 3.5 mm isotropic resolution, TA=0:48 min, TE=5 ms, TR=60 ms, FA=20°, matrix size=64x64x36) followed by two high-resolution scans (with 1 mm isotropic resolution, TA=35 sec per volume, TE=30 ms, TR=60 ms, FA=20°, matrix size=256x256x176, ETL=64).
Volunteer Study
Following written informed consent, two subjects were scanned at 3T (same as above) using the same coil following the same protocol as in the phantom scans. Volunteers were asked to either nod (rotation around x) or shake (rotation around y).
Evaluation
We utilized the first volume as the ground truth and calculated the Normalized Root Mean Square Error (NRMSE) in three scenarios: without any motion correction, with motion correction (using parameters from registration), and with both motion and field correction (utilizing parameters from FIDnav-based shim measurements)
Results
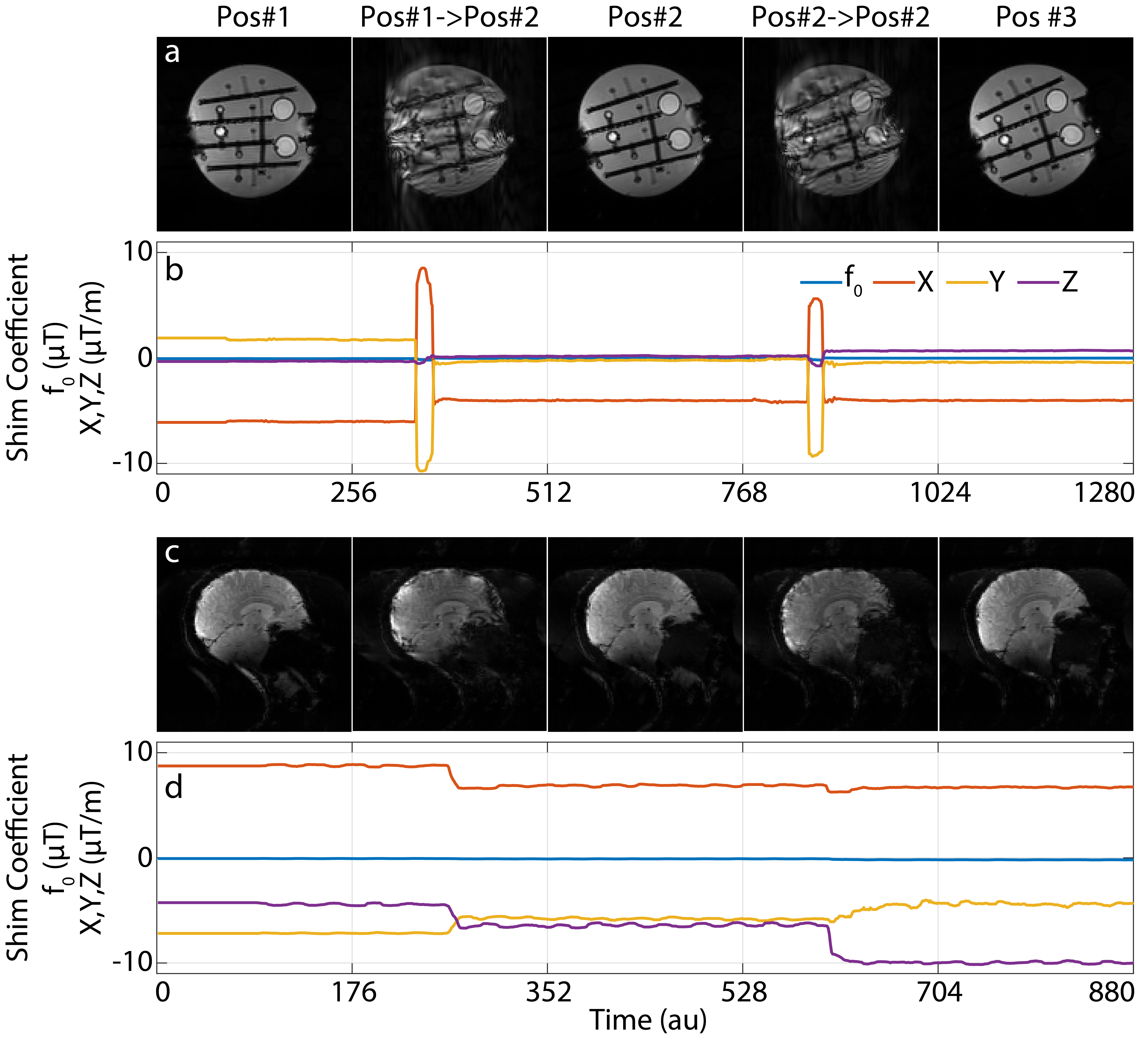
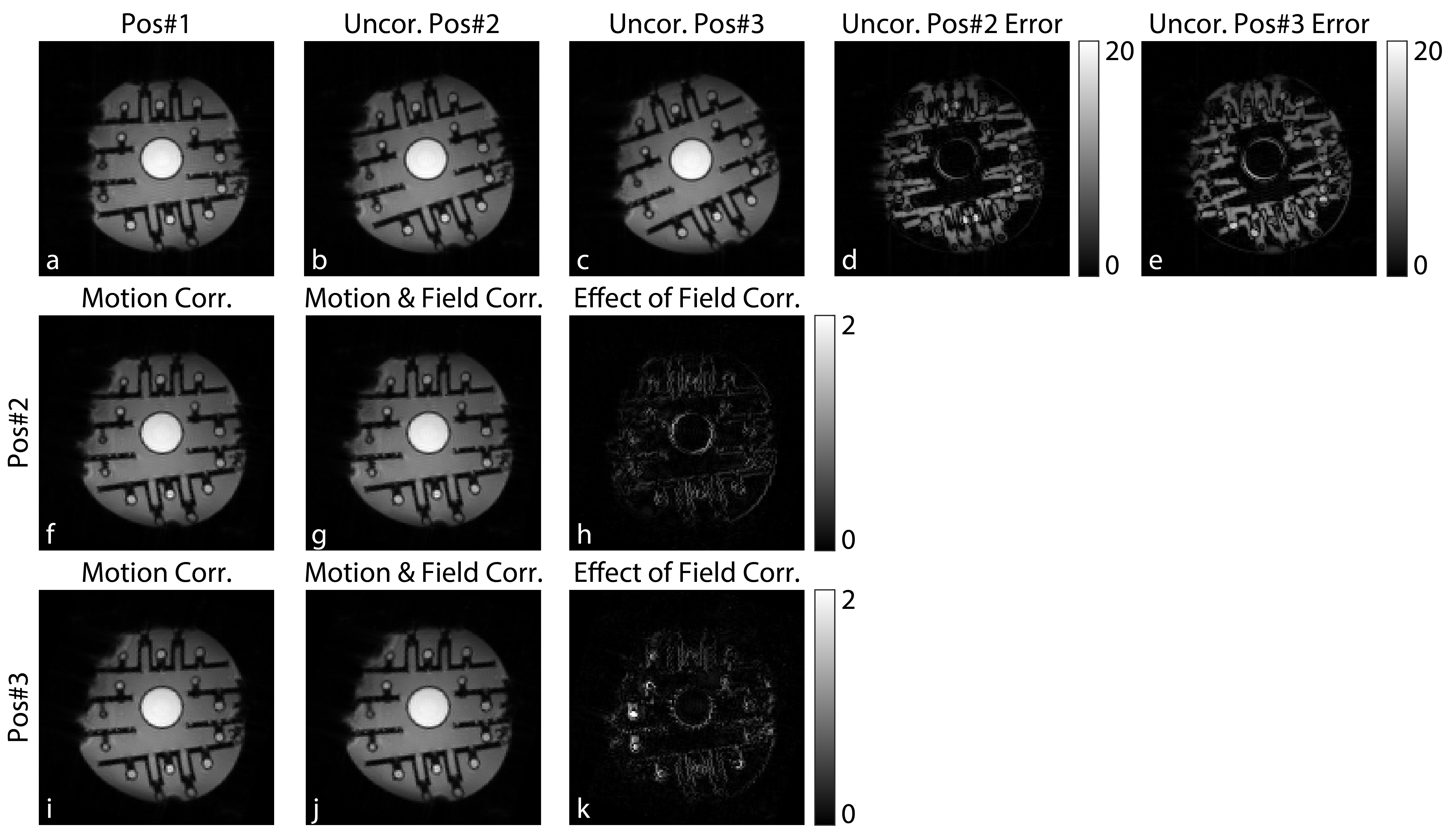
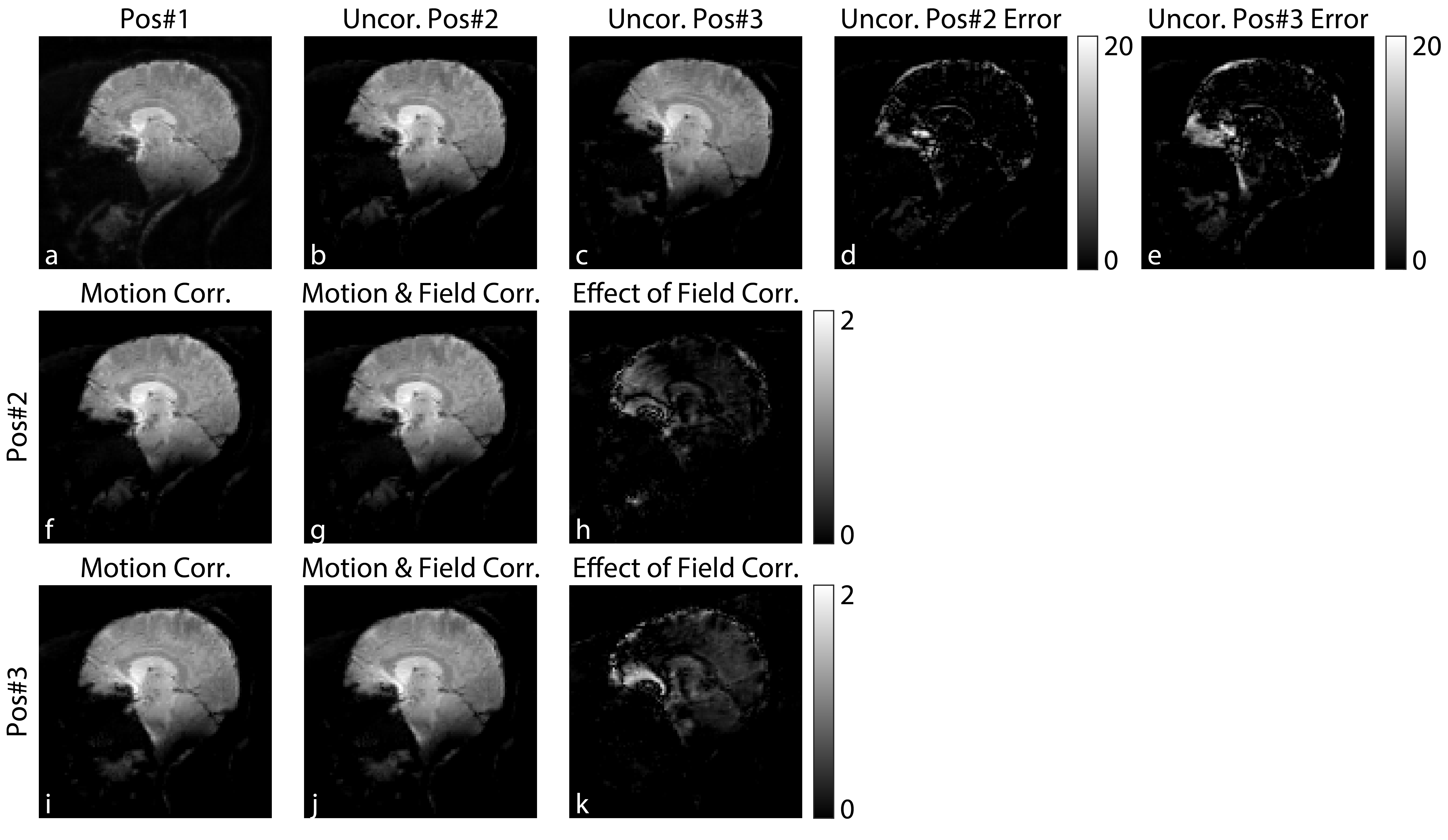
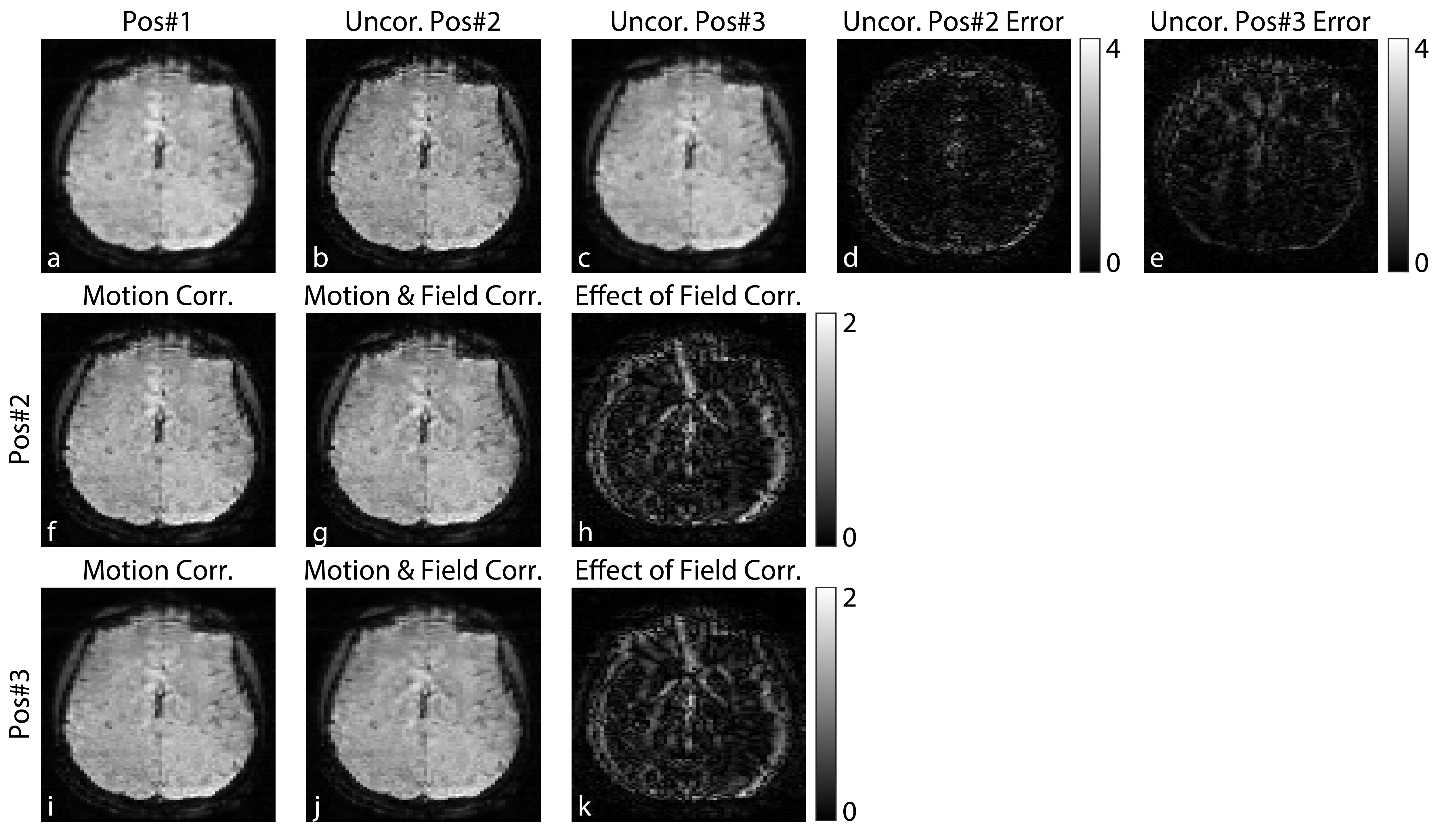
Figure 2 summarizes the field measurements calculated using FID navigators for the phantom and volunteer experiments. Figure 3 shows the results of the phantom experiment, highlighting the reduced errors between position 1 and other positions after applying motion and field corrections. Figure 4 and 5 show the same for the volunteer experiment with sagittal and transverse orientations. In these figures, the subplots (a-e) show the amount of motion occurring between volumes 1 and 3, which was used to correct for motion as shown in the subplots (f,i). First column in subplots (a,f,i) shows motion correction alone, while the second column in subplots (b,g,j) adds field correction. The difference images in subplots (h,k) demonstrate additional improvement by applying FIDnav-based field correction after motion correction.The proposed FID-navigated technique accurately estimated and corrected for the field changes, further improving the alignment between volumes with motion (NRMSE in figure caption) in both volunteer datasets.Discussion and Conclusion
In this work, we investigated using FID navigators to measure and correct for motion-related field changes when external motion information is available. Our results show that for the rotations up to 10 degrees, field correction using FIDnavs improved alignment errors between different volumes after rigid body motion correction was applied. Future work will investigate using FIDnavs to concurrently measure motion and field changes.Acknowledgements
This research was supported in part by NIH grant R01NS121657. Research reported in this publication was supported by the Office Of The Director, National Institutes Of Health of the National Institutes of Health under Award Number S10OD025111.References
- Wallace, T.E., Afacan, O., Kober, T. and Warfield, S.K., 2020. Rapid measurement and correction of spatiotemporal B0 field changes using FID navigators and a multi‐channel reference image. Magnetic resonance in medicine, 83(2), pp.575-589.
- Liu, J., de Zwart, J.A., van Gelderen, P., Murphy‐Boesch, J. and Duyn, J.H., 2018. Effect of head motion on MRI B 0 field distribution. Magnetic resonance in medicine, 80(6), pp.2538-2548
- Wallace, T.E., Afacan, O., Waszak, M., Kober, T. and Warfield, S.K., 2019. Head motion measurement and correction using FID navigators. Magnetic resonance in medicine, 81(1), pp.258-274
- Sati, P., Patil, S., Inati, S., Wang, W.T., Derbyshire, J.A., Krueger, G., Reich, D.S. and Butman, J.A., 2017. Rapid MR susceptibility imaging of the brain using segmented 3D echo-planar imaging (3D EPI) and its clinical applications. Magnetom Flash, 68, pp.26-32.
- Poser, B.A., Koopmans, P.J., Witzel, T., Wald, L.L. and Barth, M., 2010. Three dimensional echo-planar imaging at 7 Tesla. Neuroimage, 51(1), pp.261-266
- Wallace, T.E., Kober T., Warfield S.K., and Afacan O., 2021. FID-navigated phase correction for multi-shot 3D EPI acquisitions. 29th ISMRM, Abstract No:3526.
- Utkur, M, Wallace, T.E, Jaimes, C, Kober T., Warfield S.K., Kurugol, S, and Afacan O., 2021. Dynamic field correction for improved susceptibility weighted imaging with FID-navigated 3D EPI. 31st ISMRM, Abstract No:1155.
- Fessler, J., 2007. On NUFFT-based gridding for non-Cartesian MRI. J. Magn. Reson. Imaging, 188:191-195.
- McCormick M, Liu X, Jomier J, Marion C, Ibanez L. ITK: enabling reproducible research and open science. Front Neuroinform. 2014;8:13. (2014) . https://doi.org/10.3389/fninf.2014.00013
Figures