4430
A Single Oscillating Waveform-based Gradient Delay Estimation1Department of Diagnostic Radiology and Nuclear Medicine, University of Maryland, Baltimore, Baltimore, MD, United States, 2Siemens Healthineers, Philadelphia, PA, United States, 3Department of Neurology, University of Pennsylvania, Philadelphia, PA, United States
Synopsis
Keywords: Data Acquisition, Gradients, Gradient delay estimate
Motivation: The study was motivated by substantially reducing the calibration scan time for gradient delay estimation in spiral imaging.
Goal(s): we only acquire a single spiral readout along each channel for delay estimation, which enables a substantial reduction in the calibration scan time.
Approach: Our proposed method of SODA estimates the delay by calculating the relative shift between the MR spectrums required in a single scan as the k-space trajectory progresses from the negative kx direction to the positive kx direction and vice versa, i.e., from +kx to -kx.
Results: The delay values demonstrated robust agreement and consistency between SODA and the reference.
Impact: The SODA method delivers accurate delay estimates within extremely short scan time (about 50 ms). This technique can seamlessly integrate with any host sequence to correct k-space location errors stemming from gradient delays.
Introduction
When employing rapid acquisition techniques involving time-varying gradients, such as spiral imaging (1), the actual trajectory is prone to deviate from its theoretical k-space positions (2). Robison et al. (3) introduced a technique for quantifying time delays by employing two sequential oscillating gradient waveforms within each gradient channel, each with a sign reversal. However, the method prolongs scan time. In this study, we here improved that method to only acquire a single spiral readout for delay estimation, which enables a substantial reduction in the calibration scan time.Materials and Methods
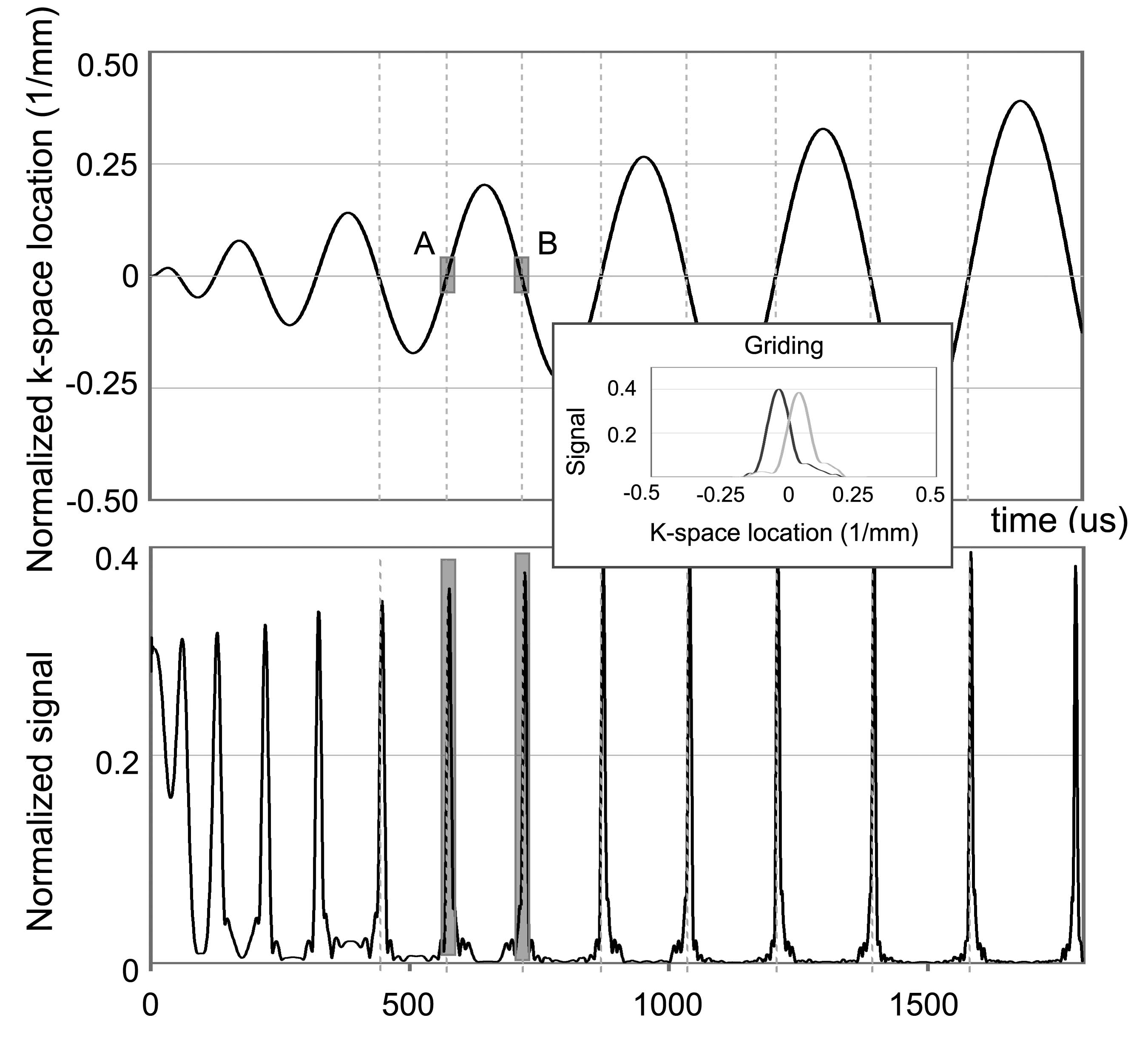
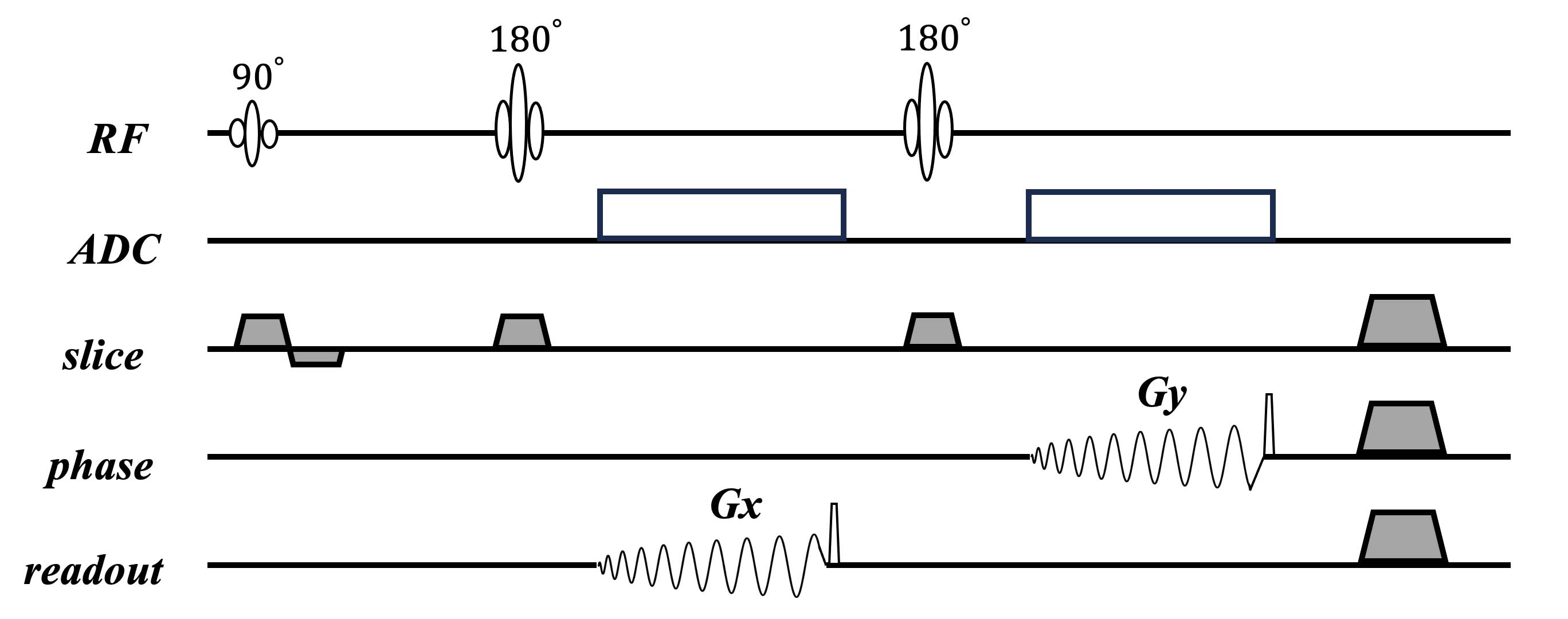
Our Single Oscillating waveform-based gradient Delay estimation Algorithm (SODA) estimates the delay by calculating the relative shift between the MR spectrums required in one single scan as the k-space trajectory progresses from the negative kx direction to the positive kx direction and vice versa. Figure 1 illustrates the SODA process. The k-space location is shown in the top panel. After a few cycles, the two neighboring zero-crossing k-space segments, e.g., the two small gray regions marked with A and B regions in Fig. 1 exhibit nearly linear behavior. The bottom panel shows the two k-space data segments corresponding to the A and B regions in the top panel. In the absence of time delay, the peaks of such data segments coincide with the zero k-space location. However, when a time delay is introduced, the k-space data segments acquired during the transition from negative to positive or vice versa exhibit shifts in opposite directions. These shifts occur in proportions defined by ∆k = γG∆t, where γ is the gyromagnetic ratio, G is the gradient amplitude, and ∆t is the time delay to be estimated. These shifts become apparent when the data segments are gridded to their theoretical positions (see the inset panel of Fig. 1). Consequently, a gap is observed between the two gridded data due to the opposing shifts, and this gap can be quantified by calculating the peak correlation value between them, and the gap equals 2∆k. Therefore, one can accurately obtain the gradient delay with the known values of γ and G. In addition, it is necessary to perform interpolations for k-space locations as well as k-space data to ensure the consistency of k-space coverage for the two data segments. The sequence diagram to collect k-space data for SODA is illustrated in Figure 2. It employs 3D FSE spiral acquisition with kz=0 partition encoding and Gx&Gy spiral gradients for the first and the second spin echoes.To assess the effectiveness of gradient delay estimation using SODA, MRI studies were performed on a 3 T Prisma scanner. We used a spherical phantom for the delay estimate. The spiral readout trajectories were generated with a maximum slew rate of 120 mT/m/ms and nine distinct maximum gradient amplitudes ranging from 20 to 36 mT/m at 2 mT/m intervals. Delay estimations for x and y gradients were carried out using Robison's method. The scan time was 18 s for the nine scans (2 s for one scan). Then the SODA sequence was implemented as depicted in Figure 1. We maintained identical spiral readout settings for the experiment. The scan time was 0.48 s for the nine scans (0.05 s for one scan).
Finally, the SODA sequence was integrated into the first interleave of each repetition within a pCASL sequence (4,5). This integration enabled us to monitor changes of the x&y gradient delay over the whole scan time.
Results
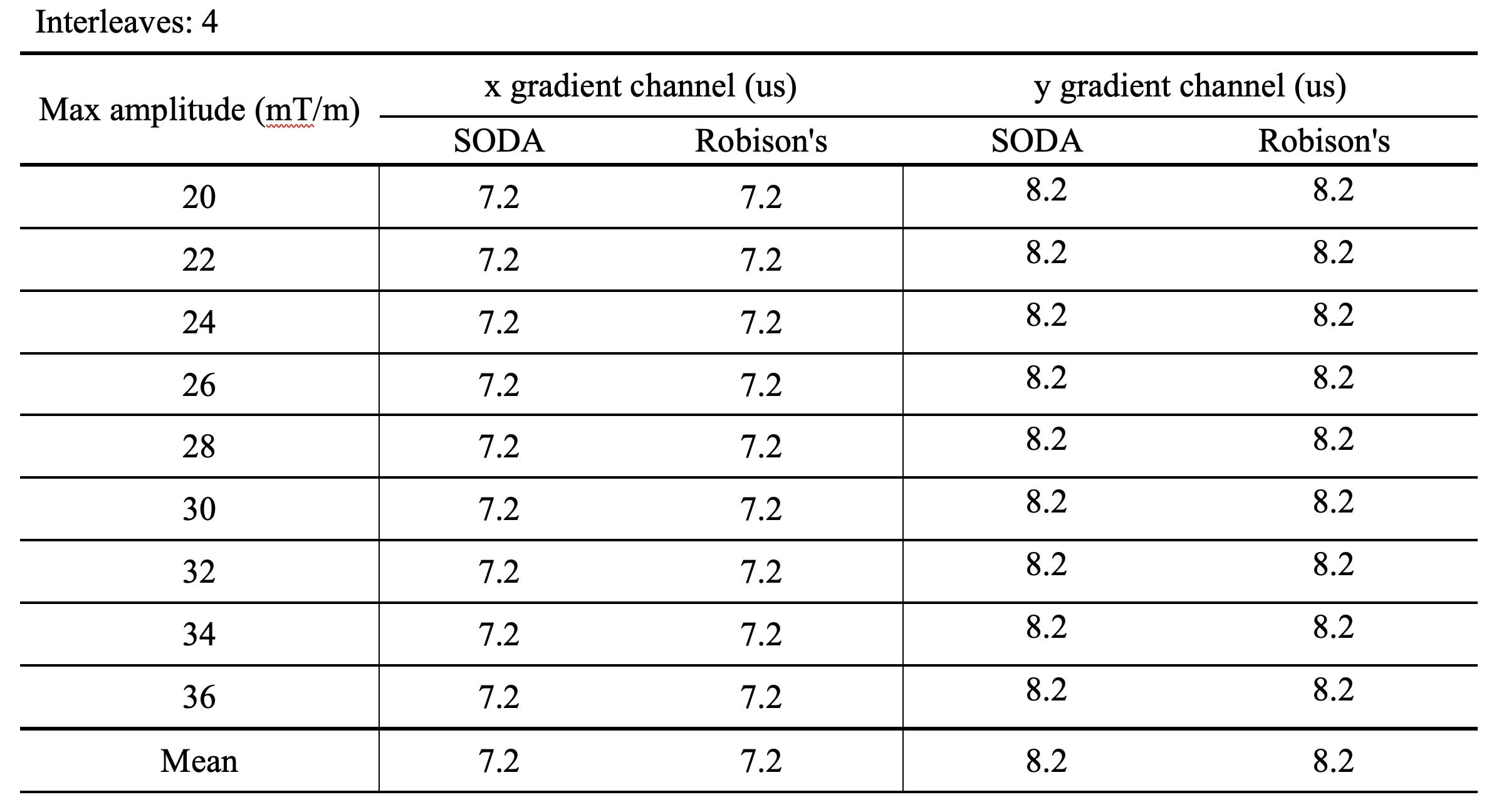
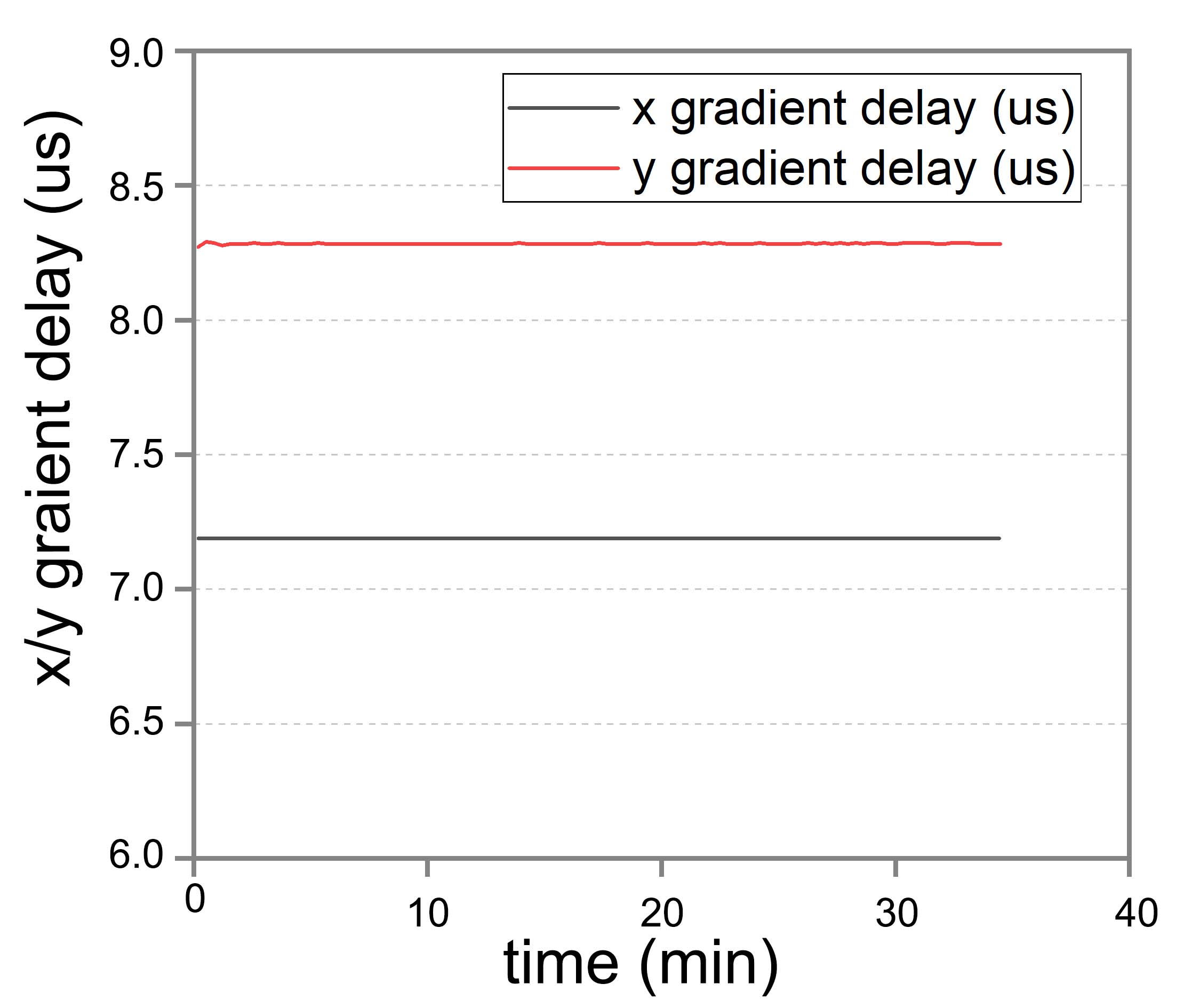
The x and y gradient delay estimates obtained by SODA and the reference method are summarized in Figure 3. The delay values for the x and y gradient channels remained consistently measured at 7.2 and 8.2 us, both in the SODA sequence and in the reference for all scans. These findings indicated the strong agreement and consistency in the estimated delays between the two methods. Figure 4 shows the changes in gradient delay for the x and y channels. The x channel exhibit remarkable time-course stability, and the y channel displays minimal fluctuations, with a standard deviation of just 0.002 us. This demonstrates the stability of gradient delays within both the x and y gradient channels in a sequence featuring large gradient slew-rate and amplitude throughout the entire scan.Discussion
The SODA method delivers accurate delay estimates within extremely short scan time (about 50 ms). This technique can seamlessly integrate with any host sequence to correct k-space location errors stemming from gradient delays. Furthermore, its capability extends to the gradient delay correction to real-time sequences, rendering it a valuable and indispensable tool for enhancing gradient delay correction procedures.Acknowledgements
This work was supported by NIH grants: R01AG060054, R01AG070227, R01EB031080-01A1, R21AG082345, R21AG080518, P41EB029460-01A1 and 1UL1TR003098.References
1. Ahn CB, Kim JH, Cho ZH. High-speed spiral-scan echo planar NMR imaging-I. IEEE Trans Med Imaging 1986;5(1):2-7.
2. Addy NO, Wu HH, Nishimura DG. Simple method for MR gradient system characterization and k-space trajectory estimation. Magn Reson Med 2012;68(1):120-129.
3. Robison RK, Devaraj A, Pipe JG. Fast, simple gradient delay estimation for spiral MRI. Magn Reson Med 2010;63(6):1683-1690.
4. Vidorreta M, Wang Z, Chang YV, et al. Whole-brain background-suppressed pCASL MRI with 1D-accelerated 3D RARE Stack-Of-Spirals readout. PLoS One 2017;12(8):e0183762.
5. Vidorreta M, Wang Z, Rodriguez I, et al. Comparison of 2D and 3D single-shot ASL perfusion fMRI sequences. Neuroimage 2013;66:662-671.
Figures