4333
In vivo data-driven discovery of tissue's constitutive relations: proof of concept on a thigh muscle1Department of Radiotherapy, Computational Imaging Group for MR Therapy and Diagnostics, University Medical Center Utrecht, Utrecht, Netherlands, 2High Field Group, University Medical Center Utrecht, Utrecht, Netherlands, 3Utrecht University, Utrecht, Netherlands, 4Centrum Wiskunde & Informatica, Amsterdam, Netherlands
Synopsis
Keywords: Signal Representations, Tissue Characterization, Muscle, Elastography
Motivation: Over simplified constitutive relations limit the applicability of in vivo biomechanical analysis of tissue.
Goal(s): To develop a data-driven framework for discovering potentially more accurate in vivo constitutive relations using displacement fields and pressure measurements obtained in a simple acquisition/reconstruction setup.
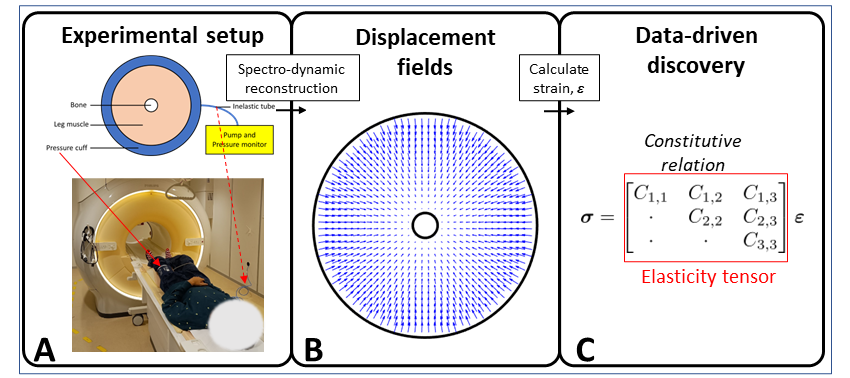
Approach: An inflatable pressure cuff is used to deform the thigh muscle during an MRI scan. Time-resolved images and displacement fields are reconstructed directly from k-space and used to extract strain information. This information allows for the discovery of potentially more accurate constitutive relations.
Results: An anisotropic constitutive relation for the hamstring is found. Numerical tests suggest the validity of the method.
Impact: Data-driven discovery of tissue’s constitutive relations could help to better characterise its mechanical properties. We demonstrated in this proof of concept study that information acquired during simple dynamic loading experiments allows reconstruction of constitutive relations that include muscle anisotropy.
Introduction
Soft tissues are typically highly complex structures that behave in an anisotropic manner1. Appropriate constitutive relations for soft tissues are pivotal in describing their mechanical behaviour. However, obtaining these relations for in vivo soft tissue is challenging, resulting in the use of (over) simplified models. For example, MR elastography generally assumes merely isotropic tissue models with focused but limited diagnostic potential2. Data-driven discovery (DDD), where measurement data is used to distil the underlying physics, could be applied to find more accurate constitutive relations3,4.In this work, we propose an acquisition and reconstruction framework to learn interpretable constitutive relations that are able to capture anisotropic behaviour of human skeletal muscles in vivo, under dynamic conditions. Our data-driven approach: (1)does not require any additional devices besides a pressure cuff to deform the muscle; (2)works with motion at physiological timescales and (3)employs simple, clinically available spoiled gradient echo sequences.
As a proof-of-concept, we infer anisotropic constitutive relations for the hamstring in the thigh muscle of a healthy volunteer. The approach is verified using a numerical phantom.
Theory
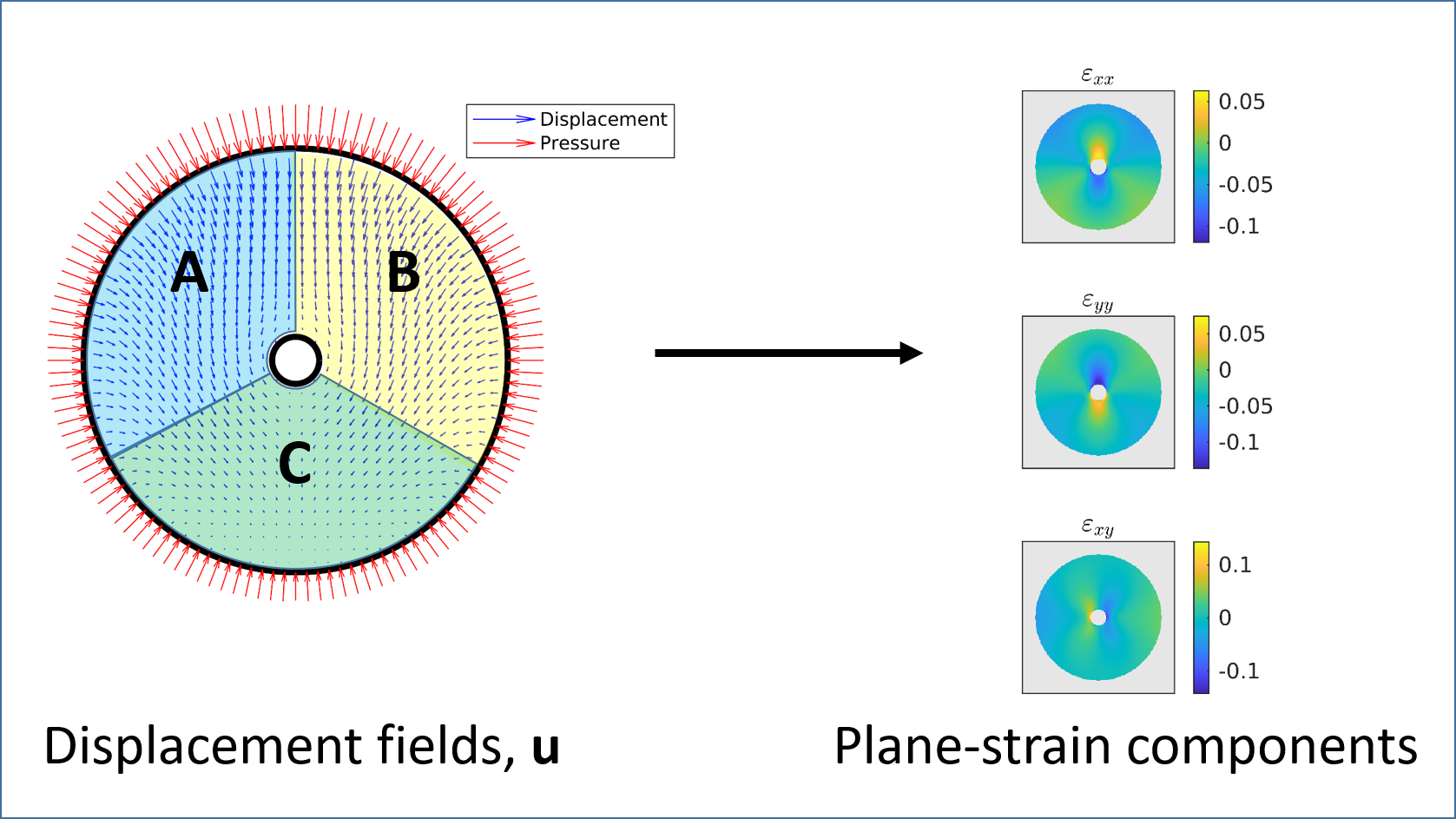
To obtain the in vivo constitutive relations, high-resolution displacement fields are required. These are captured using the novel Spectro-dynamic framework5,6 which is able to infer dynamical information directly from highly undersampled k-space data. The displacement fields are subsequently translated to strain maps that, together with pressure information on the boundaries of the muscle, are used to determine the in vivo constitutive relations by solving the optimization problem derived below.For a 2D cross-section of the muscle studied in this work, we assume a linear plane strain constitutive relation:$$\begin{bmatrix}{\sigma_{xx}\\\sigma_{yy}\\\sigma_{xy}}\end{bmatrix}=\begin{bmatrix}C_{11}&C_{12}&C_{13}\\\cdot&C_{22}&C_{23}\\\cdot&\cdot&C_{33}\end{bmatrix}\begin{bmatrix}{\varepsilon_{xx}\\\varepsilon_{yy}\\\varepsilon_{xy}}\end{bmatrix}\tag{1},$$where the dots are used to indicate the tensor’s inherent symmetry. Note that the second order stress and strain tensors (respectively$$$~\boldsymbol{\sigma}~$$$and$$$~\boldsymbol{\varepsilon}$$$) are written in vector form and that$$$~\boldsymbol{C}~$$$represents the fourth order elasticity tensor. For the physiological time scales on which our experiments are performed, the quasi-static approximation of the Cauchy equations of motion is valid:$$\vec{\nabla}\cdot\boldsymbol{\sigma}=\vec{0}\tag{2}.$$Combining Eq.(1) and (2) we obtain:$$\vec{\nabla}\cdot(\boldsymbol{C}^{(4)}:\boldsymbol{\varepsilon}^{(2)})=\vec{0}\tag{3},$$where the superscripts are used to denote the order of the tensors for clarity. The applied force or pressure acts as a boundary condition and allows for the identifiability of the constitutive relation. This information is added by noting that$$$~\boldsymbol{\sigma}\cdot\hat{n}=\vec{p}~$$$(where$$$~\hat{n}~$$$is the normal to the boundary and$$$~\vec{p}~$$$the measured pressure) and using the expression for$$$~\boldsymbol{\sigma}~$$$from Eq.(1). The tissue's constitutive relation is obtained by combining the information from the interior and the boundaries resulting in the following inverse problem:$$\underset{\boldsymbol{C}}{\arg\min}~||\vec{\nabla}\cdot(\boldsymbol{C}:\boldsymbol{\varepsilon})||_2^2+\lambda||(\boldsymbol{C}:\boldsymbol{\varepsilon})\cdot\hat{n}-\vec{p}||_2^2\tag{4},$$where$$$~\lambda~$$$is the weight of the information at the boundary.
Methods
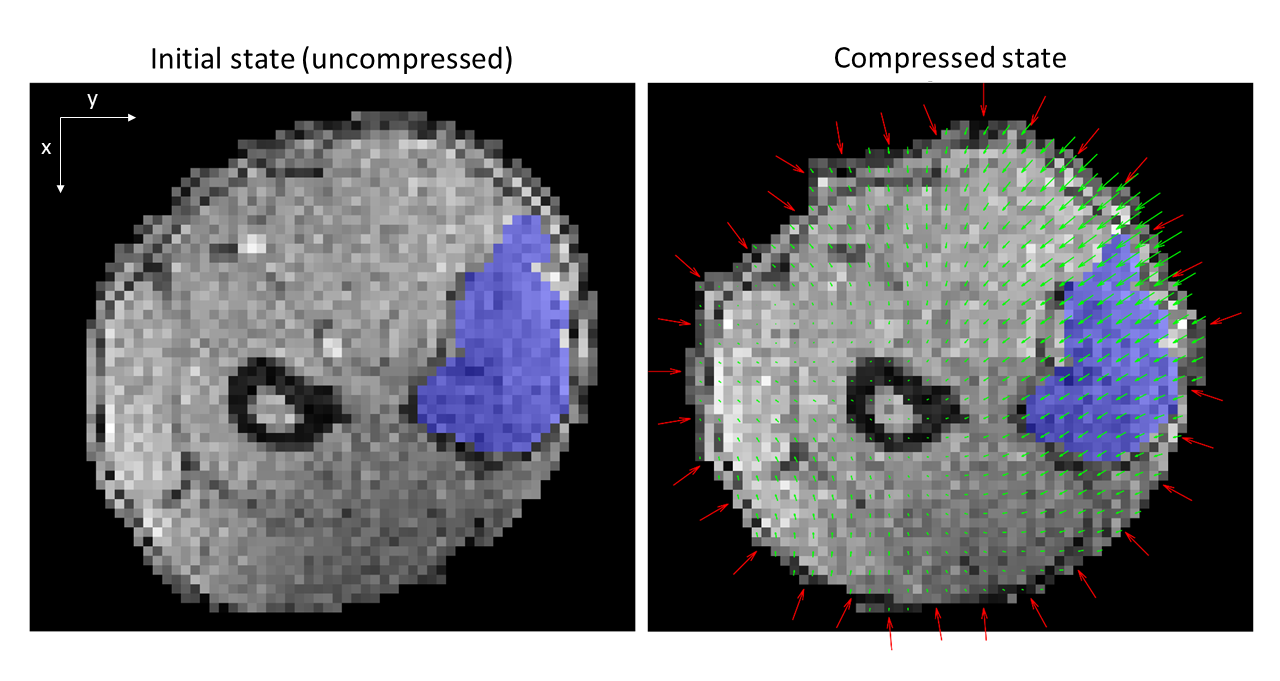
In the numerical study, displacement fields were generated for a material on a cylindrical domain mimicking a simplified bone/muscle structure. These displacement fields with added Gaussian noise were subsequently translated to strain maps (see Fig.2) that are used as input for the proposed DDD framework described in Eq.(4). The domain is divided into different sectors (with the same constitutive relation) to test the robustness of the method.For the in vivo proof of principle, the constitutive relation of the hamstring muscles was inferred. To this end, an inflatable cuff was placed around the left thigh of a volunteer (Fig.1). The pressure cuff was inflated during the acquisition and the pressure readings were recorded over time. A spoiled gradient echo sequence was used with TR/TE=5.5/2.2ms, FA=5°, FOV=384mmx192mm, 3.0mmx3.0mm. The time-resolved displacement fields were reconstructed using the Spectro-dynamic framework. For the experiments, data from 5 dynamics with a time resolution of 352ms were used. A segmented reference image was warped with the time-dependent displacement fields to track the hamstring over time (Fig.4).
Results
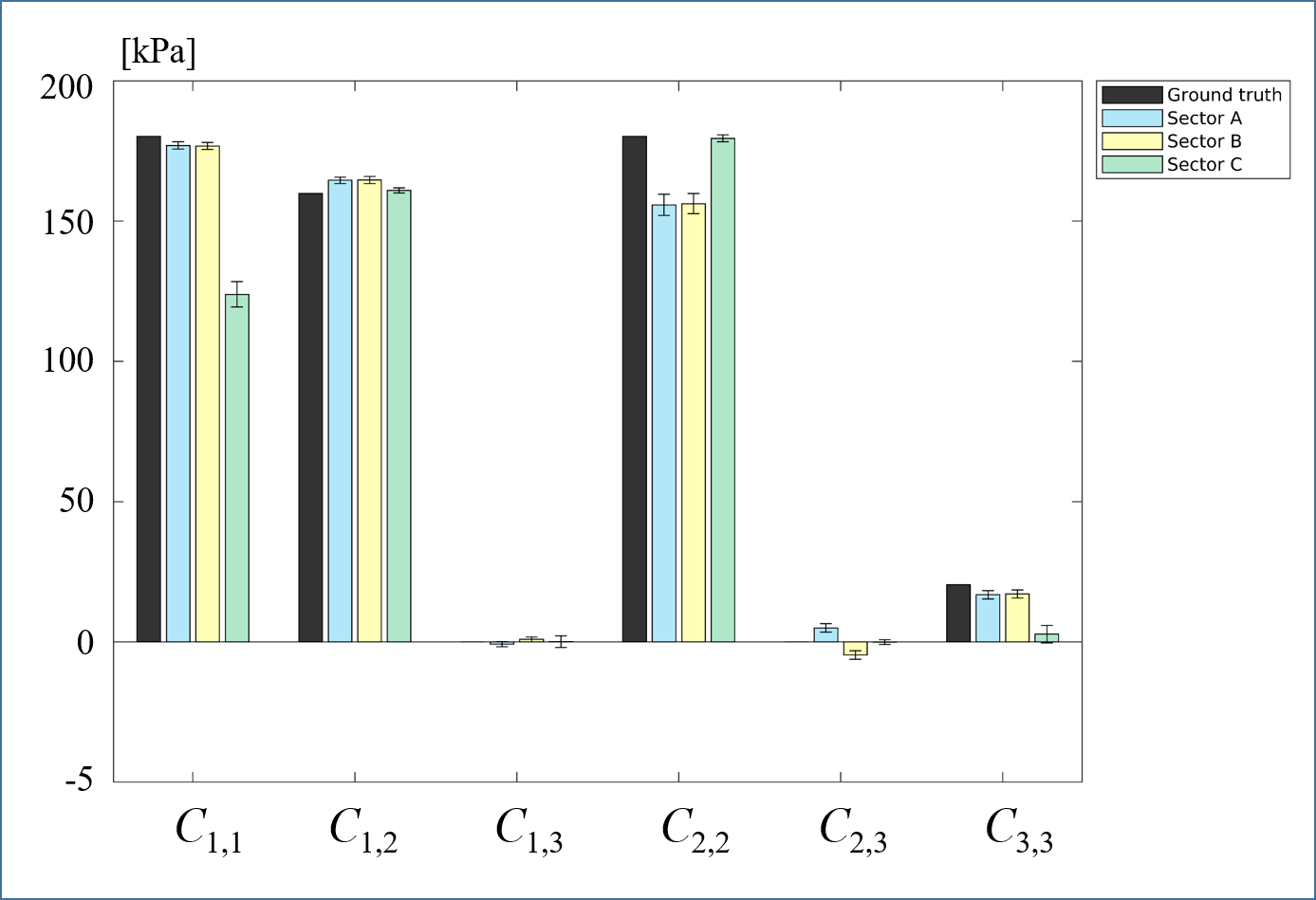
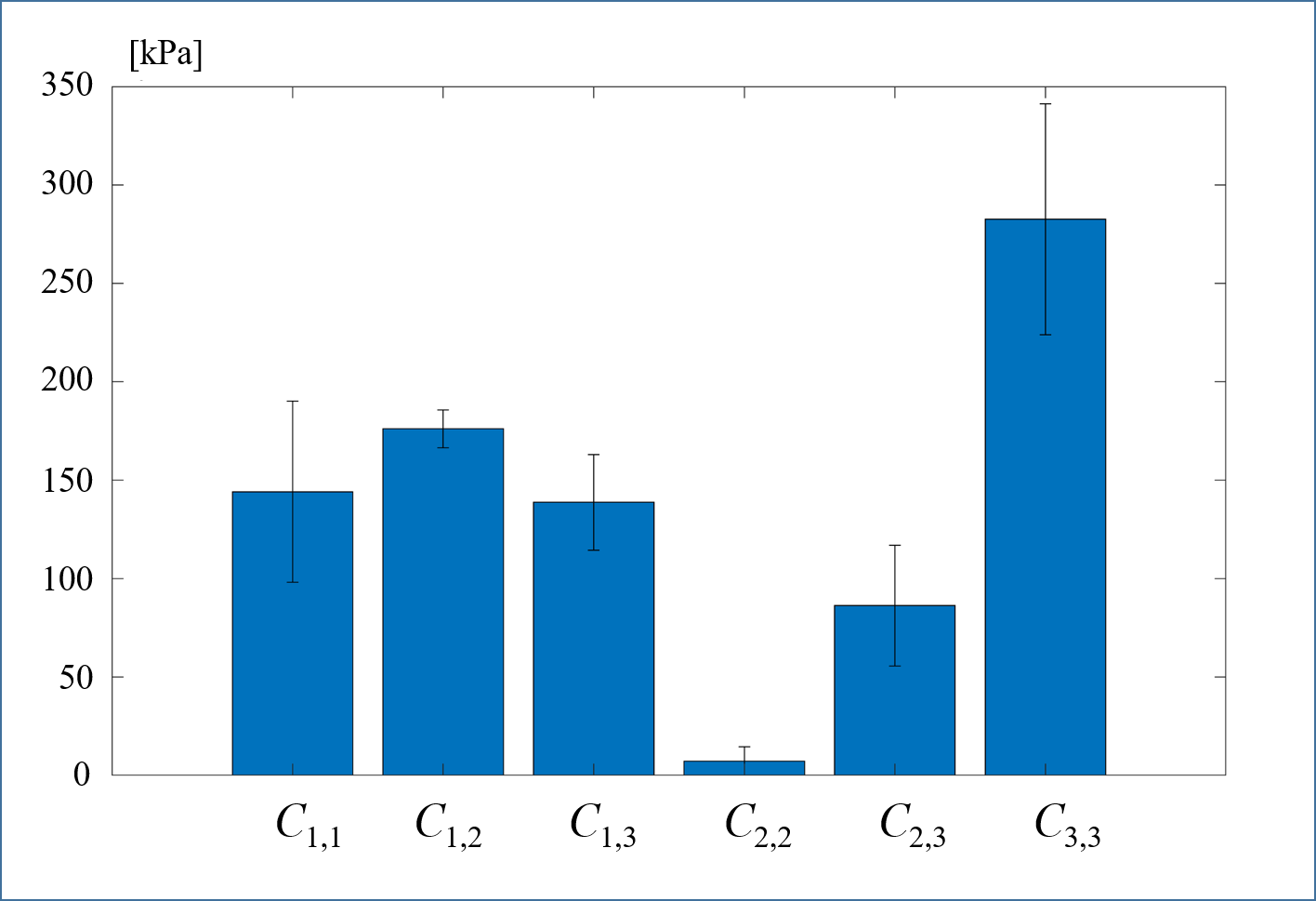
The results of the numerical study are presented in Fig.3 and show that the reconstructed constitutive relation is generally in agreement with the ground truth. In the in vivo study a constitutive relation with non-zero values for$$$~C_{1,3}~$$$and$$$~C_{2,3}~$$$is found (Fig.5).Discussion
The numerical study shows that the proposed method is able to discover the material's constitutive relation using only displacement fields and pressure information on the boundary, although some issues of suboptimal identifiability are present. These could probably be solved by optimizing the acquisition/reconstruction protocol.As no ground truth values are available for the in vivo hamstring, we can only conclude that the reconstructed values have a realistic order of magnitude7. The non-zero values for$$$~C_{1,3}~$$$and$$$~C_{2,3}~$$$indicate anisotropic in-plane behavior in line with8-10.
A limitation of this study is that through-slice motion cannot be considered, but a 3D-implementation will be realized in the future.
Conclusion
We introduced data-driven discovery of tissue's constitutive relations using a simple MRI setup. The feasibility of the approach was demonstrated using numerical experiments and preliminary in vivo results on a human thigh.Acknowledgements
The authors want to thank Hongyan Liu for the fruitful discussions. This project is financed by the Dutch Research Council (NWO), grant 18897.References
[1] G. Chagnon, M. Rebouah, and D. Favier, “Hyperelastic Energy Densities for Soft Biological Tissues: A Review,” J. Elast., vol. 120, no. 2, pp. 129–160, Aug. 2015, doi: 10.1007/s10659-014-9508-z.
[2] B. Babaei et al., “Magnetic Resonance Elastography Reconstruction for Anisotropic Tissues,” Med. Image Anal., vol. 74, p. 102212, Dec. 2021, doi: 10.1016/j.media.2021.102212.
[3] M. Flaschel, S. Kumar, and L. De Lorenzis, “Unsupervised discovery of interpretable hyperelastic constitutive laws,” Comput. Methods Appl. Mech. Eng., vol. 381, p. 113852, Aug. 2021, doi: 10.1016/j.cma.2021.113852.
[4] D. González, F. Chinesta, and E. Cueto, “Learning Corrections for Hyperelastic Models From Data,” Front. Mater., vol. 6, 2019, doi: 10.3389/fmats.2019.00014.
[5] M. H. C. van Riel, N. R. F. Huttinga, and A. Sbrizzi, “Spectro-Dynamic MRI: Characterizing Mechanical Systems on a Millisecond Scale,” IEEE Access, vol. 10, pp. 271–285, 2022, doi: 10.1109/ACCESS.2021.3138631.
[6] M. H. C. van Riel, T. van Leeuwen, C. A. T. van den Berg, and A. Sbrizzi, “Time-Resolved Reconstruction of Motion, Force, and Stiffness Using Spectro-Dynamic MRI,” IEEE Trans. Comput. Imaging, vol. 9, pp. 917–927, 2023, doi: 10.1109/TCI.2023.3324757.
[7] C. F. Guimarães, L. Gasperini, A. P. Marques, and R. L. Reis, “The stiffness of living tissues and its implications for tissue engineering,” Nat. Rev. Mater., vol. 5, no. 5, Art. no. 5, May 2020, doi: 10.1038/s41578-019-0169-1.
[8] M. Takaza, K. M. Moerman, J. Gindre, G. Lyons, and C. K. Simms, “The anisotropic mechanical behaviour of passive skeletal muscle tissue subjected to large tensile strain,” J. Mech. Behav. Biomed. Mater., vol. 17, pp. 209–220, Jan. 2013, doi: 10.1016/j.jmbbm.2012.09.001.
[9] K. Tan, S. Cheng, L. Jugé, and L. E. Bilston, “Characterising skeletal muscle under large strain using eccentric and Fourier Transform-rheology,” J. Biomech., vol. 48, no. 14, pp. 3788–3795, Nov. 2015, doi: 10.1016/j.jbiomech.2015.08.025.
[10] J.-L. Gennisson, T. Deffieux, E. Macé, G. Montaldo, M. Fink, and M. Tanter, “Viscoelastic and Anisotropic Mechanical Properties of in vivo Muscle Tissue Assessed by Supersonic Shear Imaging,” Ultrasound Med. Biol., vol. 36, no. 5, pp. 789–801, May 2010, doi: 10.1016/j.ultrasmedbio.2010.02.013.
Figures