4275
Efficient spatial regularisation of dictionary matching using discrete Markov random fields1School of Biomedical Engineering and Imaging Sciences, King's College London, London, United Kingdom, 2MR Research Collaborations, Siemens Healthcare Limited, Camberley, United Kingdom, 3School of Engineering, Pontificia Universidad Católica de Chile, Santiago, Chile, 4Millennium Institute for Intelligent Healthcare Engineering, Santiago, Chile, 5Institute for Biological and Medical Engineering, Pontificia Universidad Católica de Chile, Santiago, Chile
Synopsis
Keywords: Image Reconstruction, Image Reconstruction
Motivation: Dictionary matching, used extensively in quantitative MRI, is resistant to standard approaches to spatial regularisation due to its discrete nature.
Goal(s): Demonstrate the feasibilty of efficient spatial regularisation of parameter maps produced via dictionary matching, in this work using total variation (TV) regularisation.
Approach: Spatially regularised dictionary matching was formulated as an optimisation on a discrete Markov random field, and the result optimisation problem solved using a primal-dual strategy, with the efficient iterative solver FastPD.
Results: TV regularisation improved apparent quality of parameter maps in phantoms and in vivo.
Impact: The proposed technique offers a means to improve the quality of parameter maps from any quantitative framework employing dictionary matching, covering a wide range of possible anatomies and clinical applications.
Introduction
Dictionary matching is key to many cutting edge quantitative MRI sequences, but its discrete nature presents a challenge to the application of common spatial regularisation techniques. We propose a formulation of spatially regularised dictionary matching as an optimisation on a discrete Markov random field, permitting an efficient iterative optimisation using primal-dual strategies1.Methods
Dictionary matching assigns parameter estimates to voxels by matching a series of measurements of each voxel—its ‘fingerprint’—against a dictionary of simulated fingerprints. For a volume $$$V$$$ of voxels $$$x$$$, normalised fingerprints $$$\hat{\bf f}(x)$$$, and parameter maps $$$\theta_1(x), ..., \theta_n(x)$$$ containing parameters from discrete sets $$$\Theta_1, ..., \Theta_n$$$, the corresponding objective function is$$\mathop{\mathrm{argmin}}_{\theta_1, ..., \theta_n}\sum_{x \in V}D\left( \hat{\bf f}(x), \hat{\bf s}\left(\theta_1(x), ..., \theta_n(x) \right) \right)\quad\text{s.t.}\quad \forall x \in V \left( \theta_1(x)\in \Theta_1 \land ...\land \theta_n(x)\in \Theta_n \right)\,,$$
where $$$\hat{\bf s}$$$ models normalised fingerprints from the relevant sequence, and $$$D$$$ defines a distance over fingerprints. We propose to include spatial regularisation of the parameter maps via a penalty term on pairs of values assigned to adjacent voxels, giving the new objective function
$$\mathop{\mathrm{argmin}}_{\theta_1, ..., \theta_n}\left[\sum_{x \in V}D\left( \hat{\bf f}(x), \hat{\bf s}\left(\theta_1(x), ..., \theta_n(x) \right) \right)+\sum_{(x,x')\in A} \sum_{i=1}^n d_i \left( \theta_i(x),\theta_i(x')\right)\right]\quad\text{s.t.}\quad \forall x \in V \left( \theta_1(x)\in \Theta_1 \land ...\land \theta_n(x)\in \Theta_n \right)\,,$$
where the set $$$A$$$ comprises all pairs of adjacent voxels, and $$$d_i$$$ defines a distance over parameter $$$\theta_i$$$. Coupling between voxels demands a global optimisation, but the data consistency term via dictionary matching is not differentiable, hence common iterative methods using gradient descent cannot be applied here.
Instead, the problem can be cast as an optimisation on a discrete Markov random field, where each vertex $$$v$$$ of a graph $$$G$$$ with edges $$$E$$$ is assigned a label $$$l(v)$$$ from the discrete set $$$L$$$. A subset of discrete Markov random field problems is described by the objective function
$$\mathop{\mathrm{argmin}}_l\left[\sum_{v \in G}q\left( v, l(v) \right)+\sum_{(v,v')\in E} r \left( l(v),l(v')\right)\right]\quad\text{s.t.}\quad \forall v \in G\left( l(v) \in L \right)\,,$$
where $$$q$$$ penalises the assignment of a label to a given vertex, and $$$r$$$ penalises the assignment of a pair of labels along an edge. Problems of this form permit efficient iterative optimisation using primal-dual methods1.
For application to dictionary matching, a vertex is created for each voxel, with edges joining the vertices corresponding to adjacent voxels. Labels correspond to combinations of parameters, and the cost of assigning a label to a vertex is the distance between the fingerprint simulated for that combination of parameters, and the fingerprint measured in the voxel belonging to that vertex. Similarly, the cost of assigning a pair of labels along an edge is the desired regularisation penalty evaluated at the parameter combinations corresponding to those vertices' labels. Letting $$$l_i$$$ denote the value of the $$$i$$$th parameter for label $$$l$$$, the overall transformation is
$$G \leftarrow V\,,\quad E \leftarrow A\,,\quad L \leftarrow \Theta_1 \times ... \times \Theta_n\,,\quad q(v,l) \leftarrow D\left( \hat{\bf f}(v), \hat{\bf s}(l_i,...,l_n) \right)\,,\quad \text{and} \quad r(l,l') \leftarrow \sum_{i=1}^n d_i(l_i,l'_i)\,.$$
In this work, total variation (TV) regularisation was applied to the parameter maps, hence
$$d_i = w_i | l_i - l'_i |$$
for weighting parameters $$$w_i$$$. This technique was applied to data from a 3D joint T1 and T2 mapping sequence2 acquiring four volumes with different T1 and T2 weightings introduced by inversion recovery and T2 preparation pulses. Relevant acquisition parameters included: FOV = 240 mm × 372 mm × 240 mm, isotropic 3 mm resolution, undersampling factor = 4. Measured volumes were reconstructed with motion-corrected iterative SENSE without additional regularisation. 1D Bloch simulations were used to generate a dictionary of 103 × 103 combinations of T1 and T2, logarithmically spaced in the intervals [80, 1600] and [16, 320] respectively. Regularised parameter maps were estimated for 240 mm × 240 mm axial slices with the iterative optimiser FastPD1,3, using the cosine distance for matching of fingerprints, and with TV regularisation applied to the T1 and T2 maps with weights $$$w_1$$$ = 5e-6 and $$$w_2$$$ = 1.5e-5 respectively. These were compared to unregularised maps from matching with the global optimum of the cosine distance.
Results
TV regularised maps in phantoms show excellent qualitative (Fig. 1) and quantitative (Fig. 2) improvement in the consistency of the estimated parameters within vials. Similar improvements are seen in-vivo (Fig. 3), with additional improvements to the appearance of respiratory motion artefacts.Discussion and Conclusion
TV regularisation improved the apparent quality of parameters maps in all test cases, when compared to unregularised dictionary matching. Future work will involve the investigation of alternative regularisation terms, and application to other data with incoherent sampling between volumes, such as those from MR fingerprinting.Acknowledgements
The authors acknowledge financial support from: (1) BHF RG/20/1/34802 (2) EPSRC EP/V044087/1 (3) Wellcome EPSRC Centre for Medical Engineering (NS/A000049/1), (4) ANID Millennium Institute iHEALTH, ICN2021_004; Fondecyt 1210637 and 1210638; Basal Funding, IMPACT, FB210024 and (5) the Technical University of Munich – Institute for Advanced Study.References
1. N. Komodakis, G. Tziritas, and N. Paragios, “Performance vs computational efficiency for optimizing single and dynamic mrfs: Setting the state of the art with primal-dual strategies,” Computer Vision and Image Understanding, vol. 112, no. 1, pp. 14–29, 2008.
2. D. Tripp, K. Kunze, M. Crabb, R. Neji, C. Prieto, and R. Botnar, “Respiratory-motion-corrected simultaneous 3D T1, T2, and fat-fraction mapping at 0.55T, for comprehensive characterization of liver tissue” in Proc. of the 2023 ISMRM Annual Meeting, 03-08 June 2023.
3. N. Komodakis and G. Tziritas, “Approximate labeling via graph cuts based on linear programming,” IEEE transactions on pattern analysis and machine intelligence, vol. 29, no. 8, pp. 1436–1453, 2007.
Figures
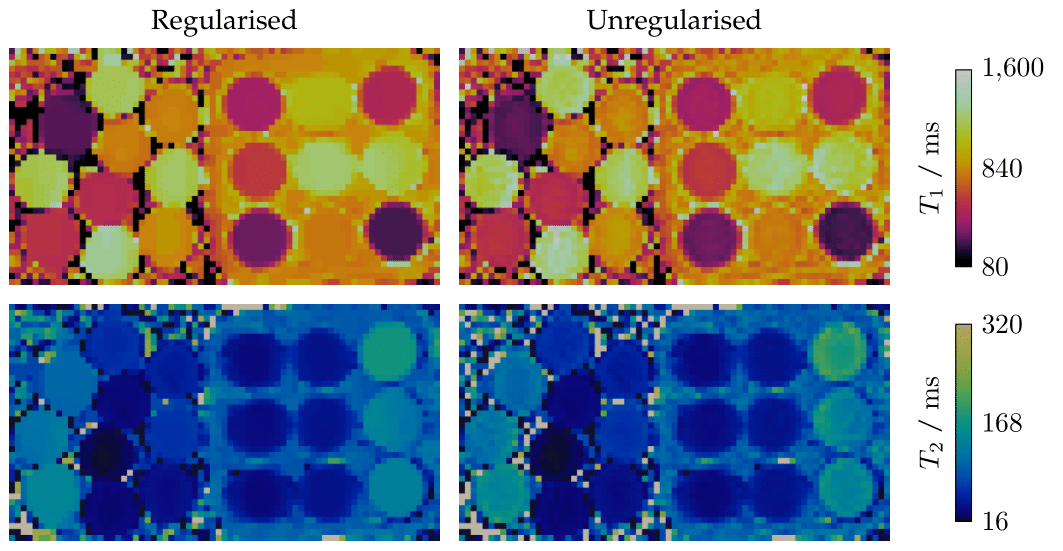
T1 and T2 maps from TV-regularised dictionary matching in two phantoms, compared with unregularised dictionary matching. TV regularisation substantially improves the visual consistency of the mapped values, particularly within vials.
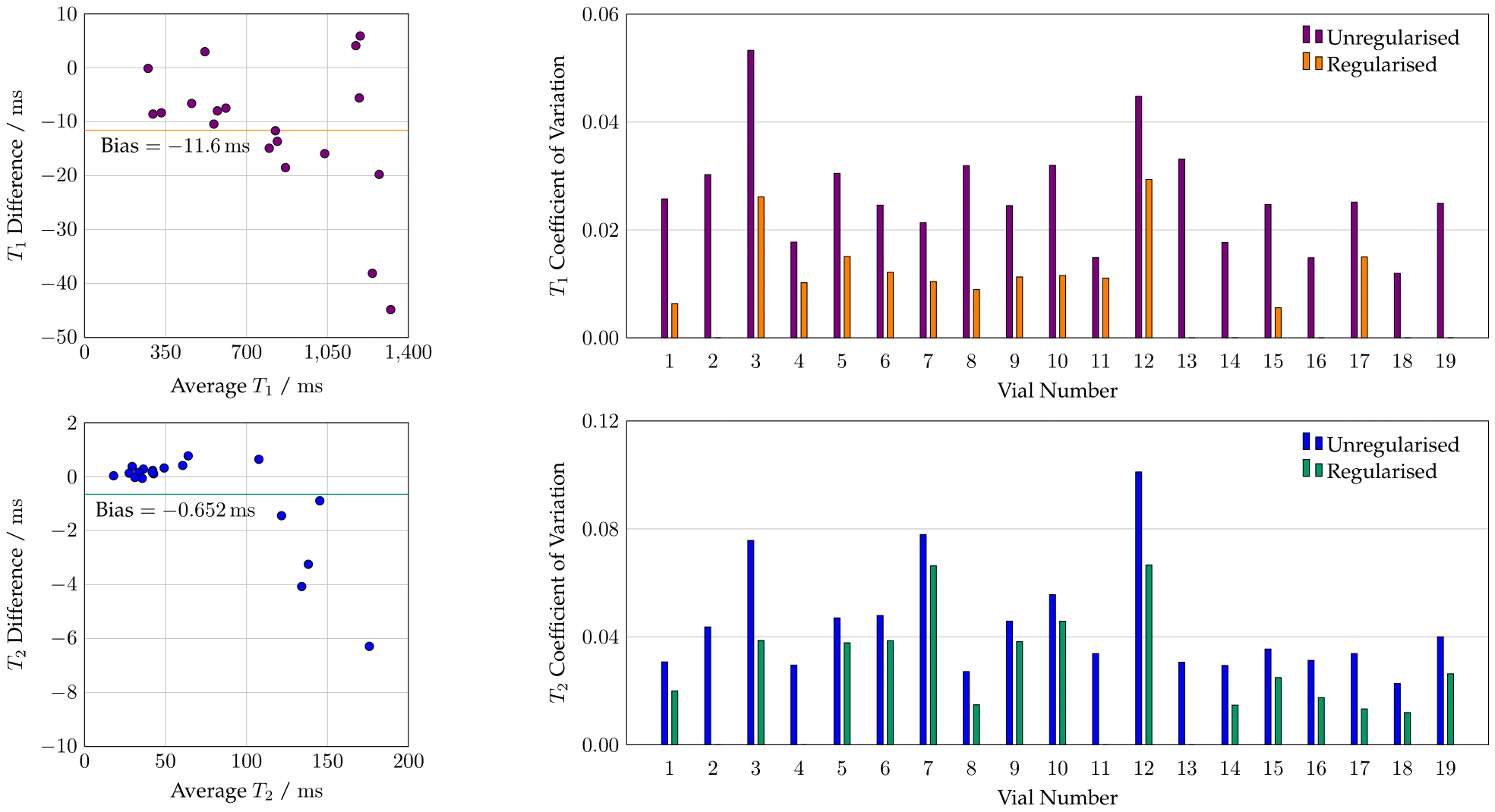
Comparisons of per-vial T1 and T2 values in the phantoms in Fig. 1 for TV regularised and unregularised dictionary matching. TV regularisation reduces the coefficient of variation in all vials, and introduces only small negative biases of -11.6 for T1 and -0.652 ms for T2.
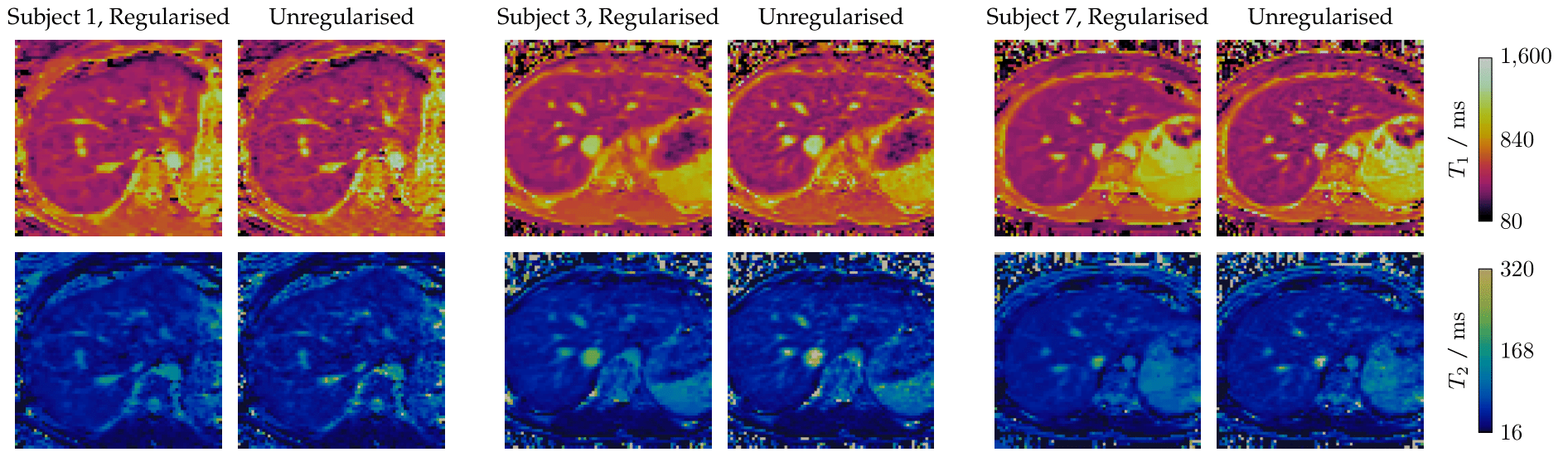
T1 and T2 maps from TV-regularised dictionary matching of axial slices of the liver acquired in three healthy subjects. All cases show a good reduction in the appearance of noise, and in respiratory motion artefacts where they occur, leading to overall qualitative improvement in the consistency of the mapped values.