4085
An open source tool for design and construction of Halbach array based low field magnets, passive shims and a robotic field mapper: MRI4ALL1Biomedical Engineering, Case Western Reserve University, Cleveland, OH, United States, 2Radiology, Stanford University, Palo Alto, CA, United States, 3LaGuardia Studio, New York University, New York, NY, United States, 4Radiology, Massachusetts General Hospital, Boston, MA, United States, 5A.A. Martinos Center for Biomedical Imaging, Charlestown, MA, United States, 6BARNLabs, Muenzkirchen, Austria, 7Biomedical Engineering, University of Michigan, Ann Arbor, MI, United States, 8NIST: National Institutes of standards and Technology, Boulder, CO, United States, 9Chemistry, New york university, New York, NY, United States, 10Radiology, Bernard and Irene Schwartz center for Biomedical Imaging, New York University Grossman school of medicine, New York, NY, United States, 11Radiology, Center for Advanced Imaging Innovation and Research (CAI2R), New York University Grossman school of Medicine, New York, NY, United States
Synopsis
Keywords: Low-Field MRI, Low-Field MRI, Open source, magnet design , passive shim, field map
Motivation: A comprehensive open-source toolbox for both design and development of low-field MRI magnets, passive shims and a robotic field mapper can accelerate democratization of low field MRIs.
Goal(s): Develop an open-source tool for optimization and construction of Halbach array magnets and passive shims. Additionally, develop and build open-source field mapper.
Approach: A simple python-based workflow was used for magnet and passive shim design, and an automated CAD model export and ring former development for the optimized geometry.
Results: A 43mT Halbach array was developed with our approach in a week at the MRI4ALL Hackathon. Compact passive shims improved homogeneity in simulation and measurements.
Impact: We have built an easy-to-use open source framework for magnet and passive shim design for low-field MRI with a capability to extract a CAD-file for easy building. Additionally an open source field mapper is developed and is used for validation.
Introduction
Low field MRI has the potential to democratize MRI[1-6], especially in sites that either do not have the infrastructure or financial resources for a traditional high-field MRI system. The low-field MR community has been contributing to open source tools to attain this goal[7]. As part of the under-a-week MRI4ALL hackathon, we designed, optimized, constructed, mapped, and shimmed a 43mT Halbach magnet. This work outlines the software framework of the magnet and passive shim design, including a CAD exporter. In addition, an open source field mapping robot (cost <$400) was constructed and used with a 3-axis Hall-probe for mapping the B0 magnet and passive shim.Methods
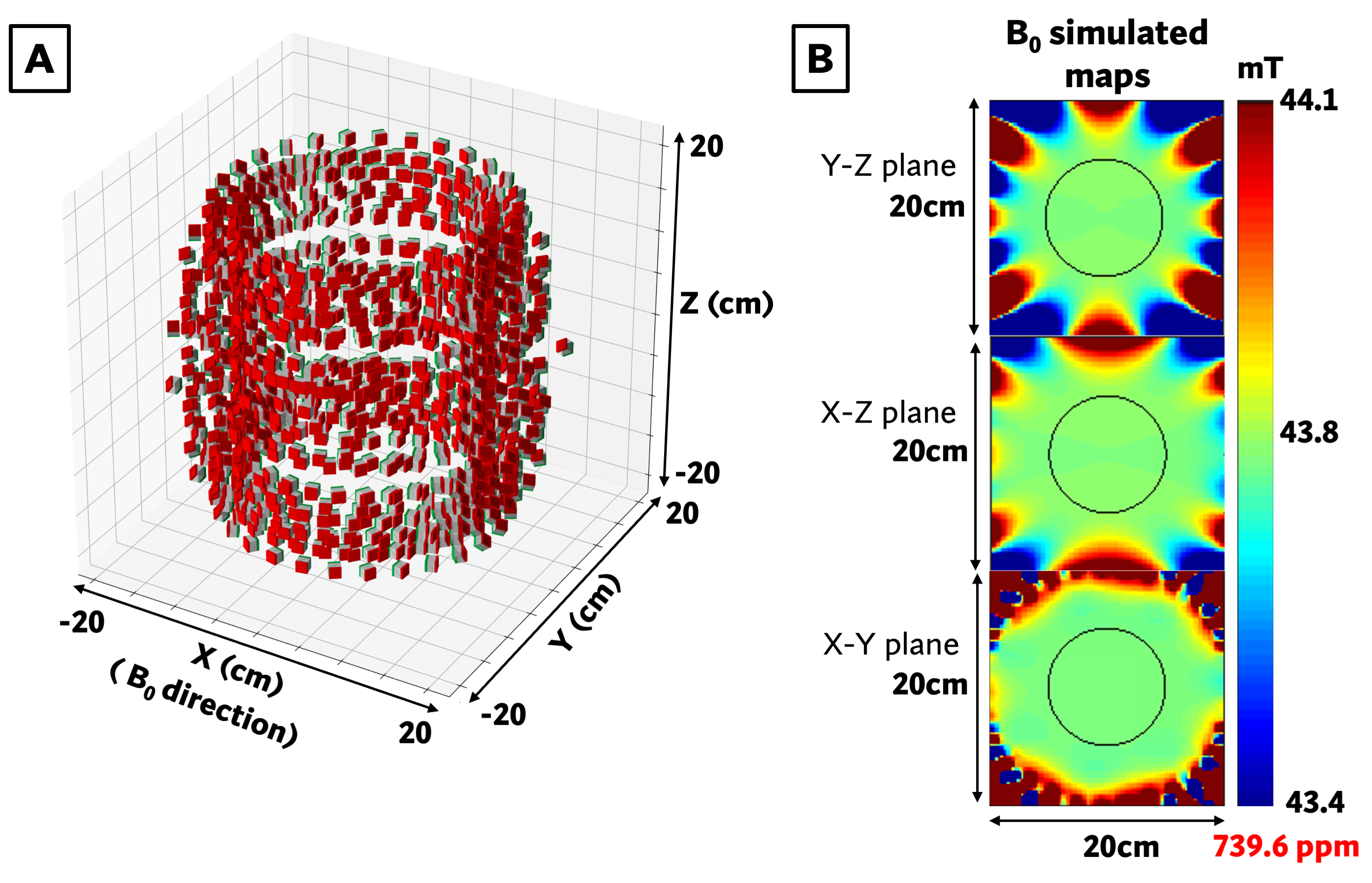
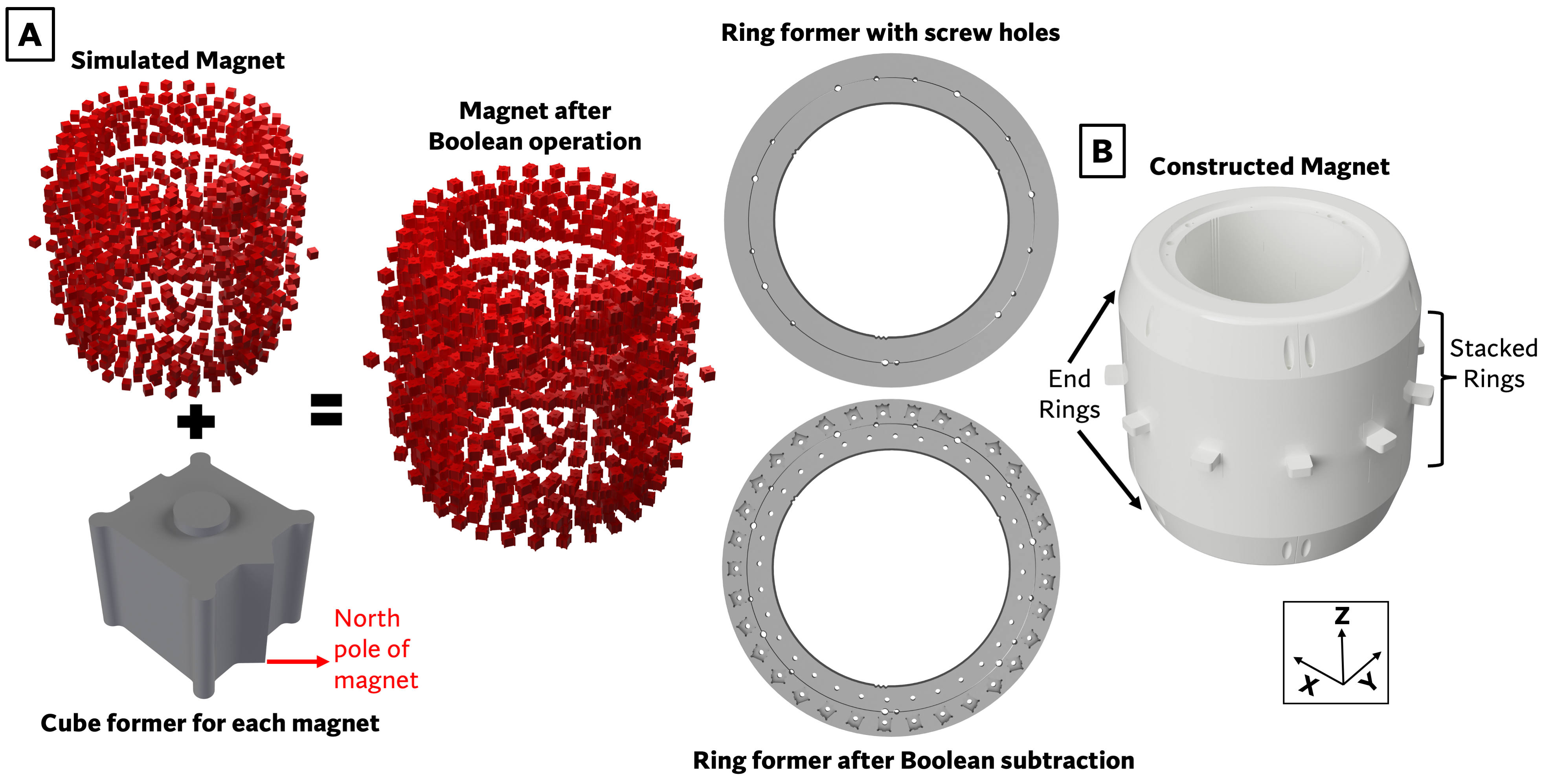
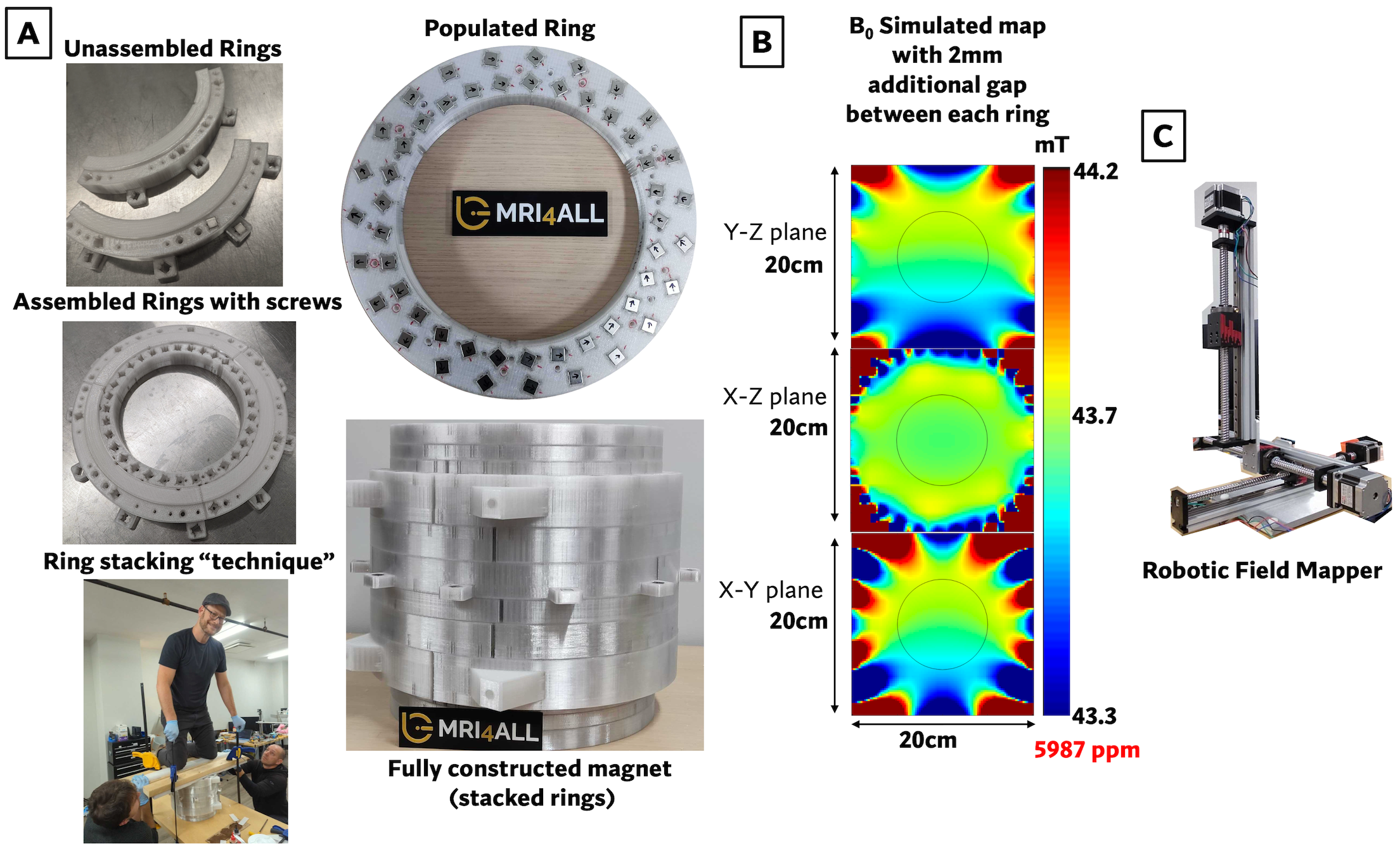
Main Magnet: To design the main magnet and passive shim array, we developed an open-source framework that employs Magpylib[8] (an open-source python package) for the permanent magnet simulation and a genetic algorithm optimization using Pymoo[9] (open-source python optimization library). The B0 magnet design consists of 12.7mm N40UH NdFeB magnet cubes. It was constrained for a minimum inner radius of 76.3mm and maximum number of magnets = 990. The optimization varied the radius of each magnet layer (3 total layers), the binary placement of each ring, and an angle offset between each ring along z. Figure 1 shows the resulting design with 990 blocks, length= 35.2cm and OD=39.05cm. The resulting magnet distribution was exported to CAD using a custom function. Figure 2 shows the resulting CAD model and demonstrates the boolean operations used to design the magnet former. Each of the 12 magnet former rings were fabricated using polycarbonate material and a 3D FDM printer. The construction process is shown in Figure 3A. Each ring was populated with the 12.7mm N40UH blocks, then stacked and fastened together with brass bolts. Due construction errors caused by magnetic forces, gaps were formed between some rings of ~2mm, which, when simulated, reduced the homogeneity (5987ppm) shown in Figure 3B.Robotic Field Mapper: From prior open-source work[10,11], a robotic field mapper (Fig.3C) was built using an Arduino-Uno-Rev3 (~$25), grblShield (~$50) and 3x CNC linear stage actuators (~$100 each). A 3-axis hall sensor probe (THM1176-MF, Metrolab, Switzerland) was attached to one of the actuators using a hollow aluminum tube (~10mm inner diameter) and custom aluminum brackets. The grblShield has a built-in driver rated at 2.5A/axis which is sufficient to move all stages and probe. The field was mapped in a volume of 10x10x10cm3 centered at the geometric iso-center of the main magnet.
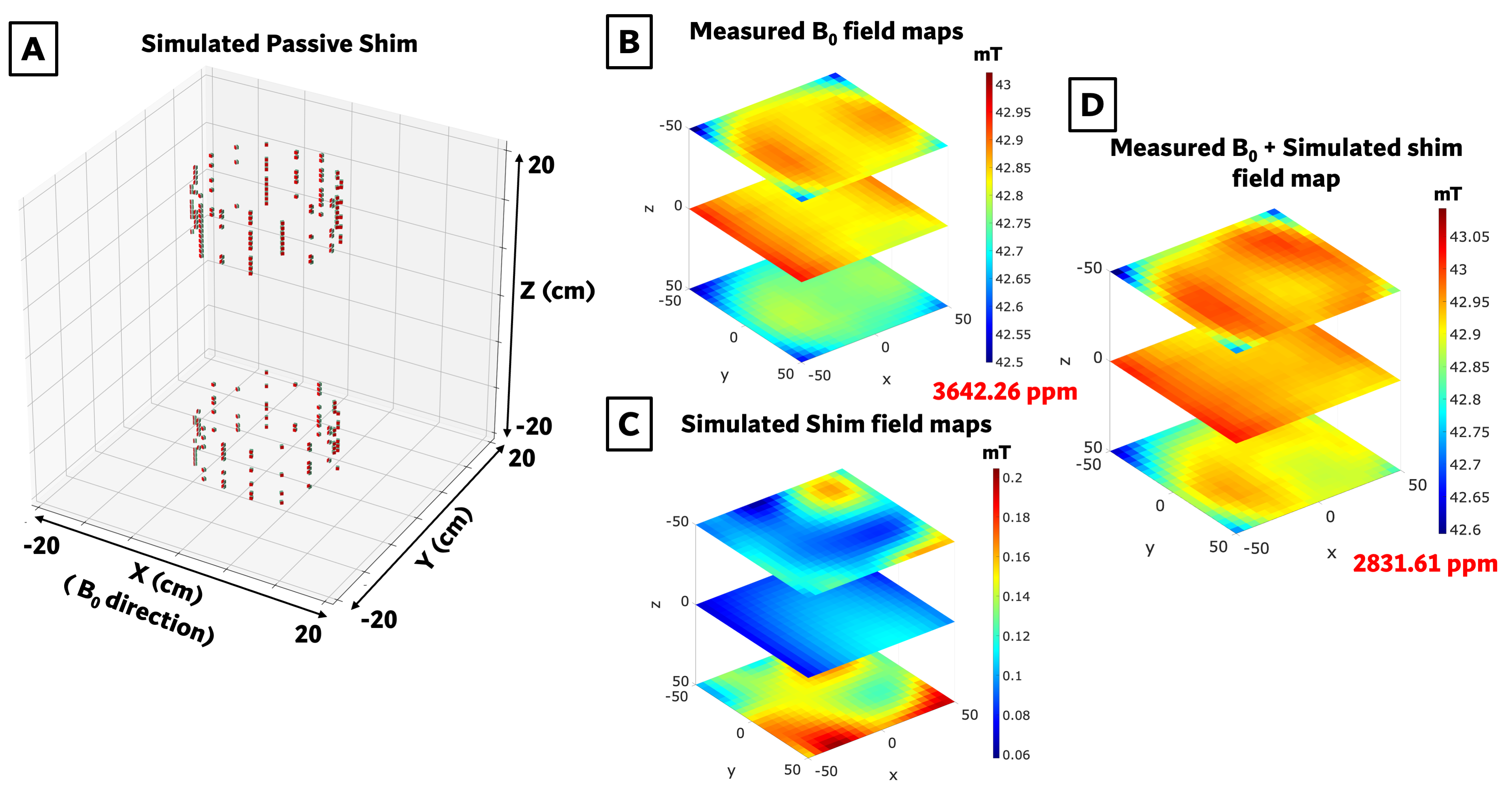
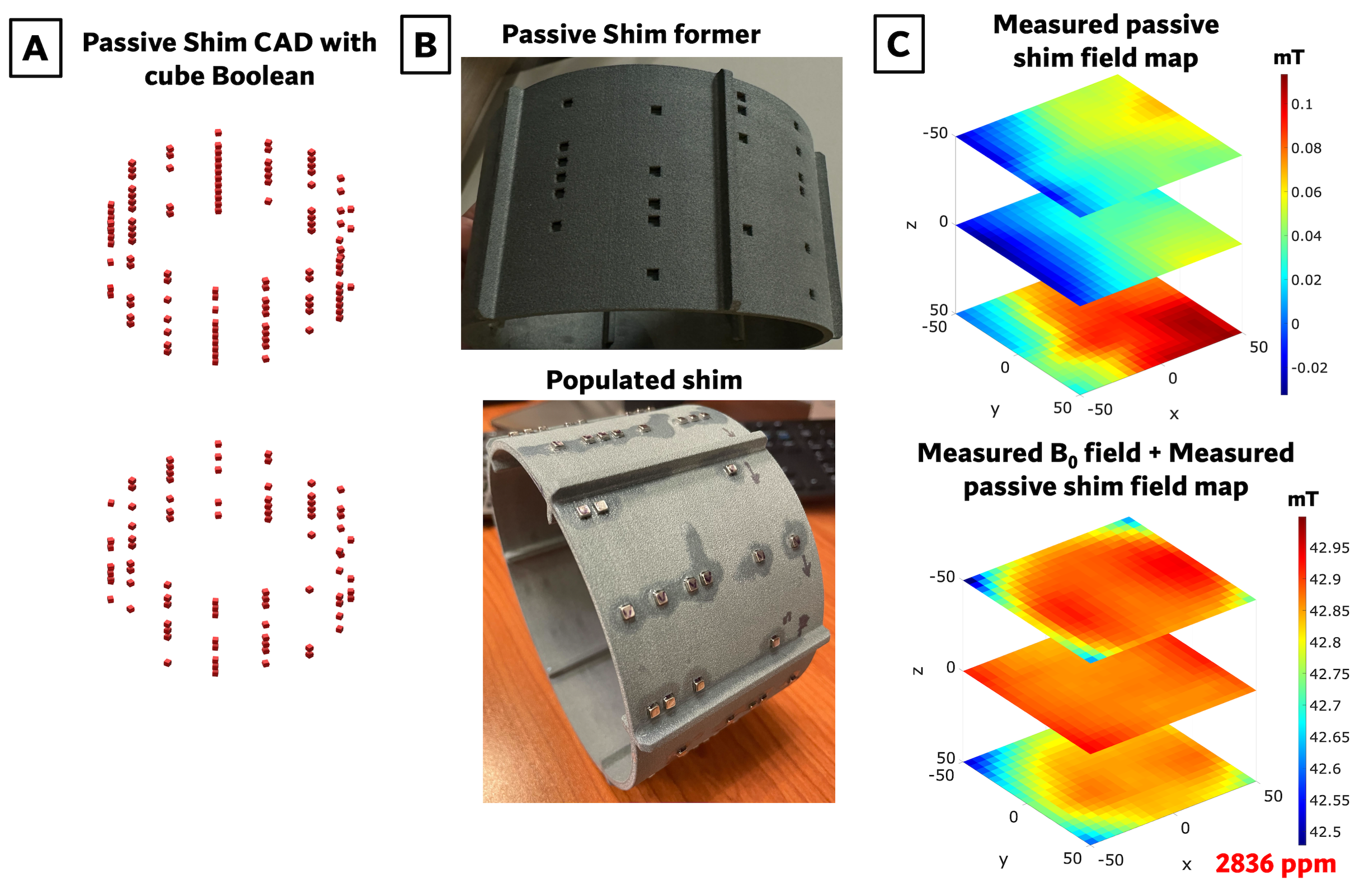
Passive shim: Measured field maps from the B0 magnet were then used for passive shimming. Since major inhomogeneity was produced along the length of the magnet, dual shim sleeves located at the ends of the magnet were assumed sufficient to correct the field inhomogeneity. The shim array was confined to a radius of 66.5mm and placed at 4cm and 23.5cm from the front of the magnet; the RF coil and shield was constructed on the space between the sleeves. A total of 25 magnets per ring (total 22 rings) were allowed for the optimization algorithm. The passive shim blocks were optimized for positions along the bore of the main magnet, their rotations about the z-axis, and a binary selection of whether or not a magnet in a ring is required. The final passive shim design is shown in Figure 4A. Figure 4B-C show the measured B0 and the simulated passive shim field maps. Figure 4D shows the addition of both field maps which resulted in a 2831 ppm homogeneity. The passive shim design was exported to CAD and subtracted from a ring geometry (Fig.5A). The formers were printed using nylon and constructed as shown in Figure 5B. The passive shim was then populated with 3mm N40UH blocks and the field was mapped outside the B0 magnet. Figure 5C shows the measured passive shim field map and the addition of this with measured B0 magnet field maps.
Results
The B0 magnet optimization predicted a 43.9mT field with 740ppm homogeneity over a 10cm DSV. The constructed magnet resulted in a measured field of 42.8mT with 3642ppm homogeneity. The passive shim array resulted in a simulated homogeneity of 2832ppm and measured improvement to 2836ppm.Discussion and Conclusion
We developed a completely open source pipeline for magnet and passive shim design and construction along with a field mapping robot over the course of a under-a-week hackathon. Additional tools for easy to build CAD design were developed. We validated this by building a 43mT Halbach array based magnet with high field homogeneity. Future work will involve further improvement to passive shimming and integration of the MRI4ALL active shimming system.Acknowledgements
Leeor Alon and Clarissa Z Cooley were the magnet team leaders at the Hackathon. All other authors contributed equally to this work. The work is supported by NYU Langone Health. Data and code availability: https://github.com/mri4all.References
1) Geethanath S, Vaughan JT Jr.. J Magn Reson Imaging. 2019. doi: 10.1002/jmri.26638.
2) Wald LL, McDaniel PC, Witzel T, Stockmann JP, Cooley CZ. J Magn Reson Imaging. 2020 doi: 10.1002/jmri.26942.
3) Sarracanie M, Salameh N. Low-Field MRI. Front Phys. 2020 Jun 12;8:172.
4) Kimberly WT, Sorby-Adams AJ, Webb AG, et al. Nat Rev Bioeng. 2023. doi: 10.1038/s44222-023-00086-w.
5) Campbell-Washburn AE, Keenan KE, Hu P, et al. Magn Reson Med. 2023. doi: 10.1002/mrm.29743. Epub 2023 Jun 22. PMID: 37345725.
6) Obungoloch J, Muhumuza I, Teeuwisse W at al. NMR Biomed. 2023.. doi: 10.1002/nbm.4917.
7) https://www.opensourceimaging.org/.
8) Ortner, M., & Coliado Bandeira, L. G. 2020.. Doi: 10.1016/j.softx.2020.100466
9) J. Blank and K. Deb.. 2020, doi: 10.1109/ACCESS.2020.2990567
10) https://github.com/Aaron-Purchase/3DFM
11) A. R. Purchase et al. IEEE Access. doi: 10.1109/ACCESS.2021.3093530
Figures