3577
Robust Highly-accelerated MR Fingerprinting Using Transformer-based Deep Learning1Biomedical Engineering, State University of New York at Buffalo, Buffalo, NY, United States, 2Lerner Research Institute, Cleveland Clinic, Cleveland, OH, United States, 3Electrical Engineering, State University of New York at Buffalo, Buffalo, NY, United States
Synopsis
Keywords: MR Fingerprinting, MR Fingerprinting
Motivation: MR fingerprinting (MRF) conventional reconstruction methods need a substantial reconstruction time and memory space. We aim to propose a novel deep-learning method for accelerated MRF reconstruction.
Goal(s): To achieve more accurate quantification reconstruction for T1 and T2 from highly undersampled MRF data.
Approach: A novel training process was also proposed to construct reliable training data with noise-like aliasing artifacts boosted by Transformer network without need to know the structure information.
Results: Experimental results demonstrate that the proposed method achieves more accurate quantification for T1 and T2 than pattern matching and DRONE.
Impact: The proposed method can generate more accurate quantitative maps for highly accelerated MRF data that enable clinical use in real application. In addition, the proposed training process is robust to different structures in the image to be reconstructed.
Introduction
MR Fingerprinting (MRF) [1] represents an innovative approach to quantitative magnetic resonance imaging, facilitating the concurrent measurement of various tissue properties. A principal challenge faced by MRF pertains to pronounced noise and artifacts in image series generated from highly undersampled data frames which lead to large quantitative map errors. Several algorithms have been developed to estimate quantitative maps more accurately [2-5] but suffers reconstruction time and memory space. Recent studies have explored deep learning techniques to address these challenges [6,7]. For example, DRONE [6] built a 3-layer fully connected neural network to learn tissue parameters from signal evolutions. However, the improvement is still limited when the data is highly undersampled. In this study, we propose a transformer network to learn the tissue parameter, leveraging the long-range dependency in the time evolution of MRF signals. To train the network more effectively, we also propose a novel method to generate training data with aliasing artifacts. Experimental results demonstrate that the proposed method achieves more accurate quantification for T1 and T2 than pattern matching and DRONE.Method
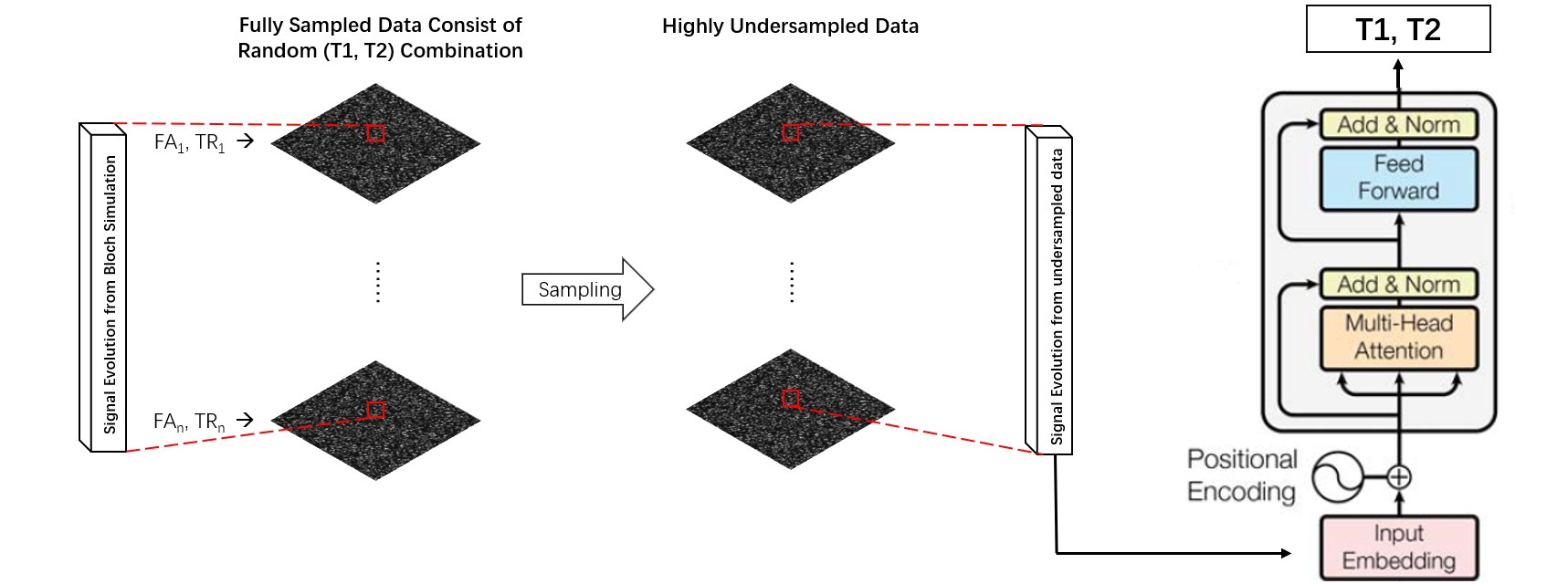
The MRF sequence uses a 3D Cartesian trajectory with readout in kx and a variable density circular Cartesian undersampling pattern in ky-kz [8]. The MRF acquisition consists of 500 time frames that are acquired using fast imaging with steady-state free precession [9]. All acquisitions used a matrix size of 96×96×24. In this work, a transformer encoder network [10] is used to estimate the (T1, T2) values from MRF signals. The transformer encoder consists of L layers of Multihead Self-Attention (MSA) and Feed Forward blocks, as shown in Figure 1.To improve the training process, we also propose a novel approach to construct training data for the deep network. Different from DRONE, where random noise was added to the elements in the dictionary to generate training data, our method can simulate the aliasing artifacts on MRF signals to make the training data closer to the testing ones. To generate the training data, first, similar to conventional MRF, a dictionary is generated for 1569 (T1, T2) pairs, consisting of T1 in the range of 100 to 2000 ms with increments of 50 ms, T2 in the range of 5 to 200 with increments of 5 ms, and T1 greater or equal to T2. Secondly, we construct a 3D image, each of whose voxel has its (T1, T2) pair taken randomly from those in the dictionary. Thereby, with the corresponding signal evolution for each voxel, we can obtain 500 frames of 3D fully sampled images. Thirdly, each voxel intensity is multiplied by a proton density value randomly generated from a Gaussian distribution tailored to the tissue characteristic of the image to be reconstructed [11,12]. This proton density value is time-independent. In the fourth step, a 3D Fourier transform is performed for each image frame to simulate MRF acquisition with the above-mentioned sequence and Cartesian undersampling in ky-kz. Finally, Zero-filled 3D Fourier reconstruction is performed for all time frames to obtain the MRF time evolution signal with spatial aliasing artifacts. We then use such MRF signal contaminated by artifacts as the input of the network, and the corresponding (T1,T2) pair as the target to train a neural network. It is worth noting that the random image does not have any spatial structure. The purpose of constructing an image is to simulate the noise-like aliasing artifacts added to the clean MRF signals. The training data generation and transformer architecture are illustrated in Fig. 1.
To evaluate the performance of the trained network, we constructed a cylinder phantom and five digital knee phantoms using the in vivo data from volunteers. The MRF acquisition using the same above-mentioned sequence was simulated with an acceleration factor of 15. The corresponding MRF signal at each voxel was then put into the trained neural network to estimate the (T1, T2) values for that voxel. The final quantitative maps were reconstructed after all voxels were processed.
Results
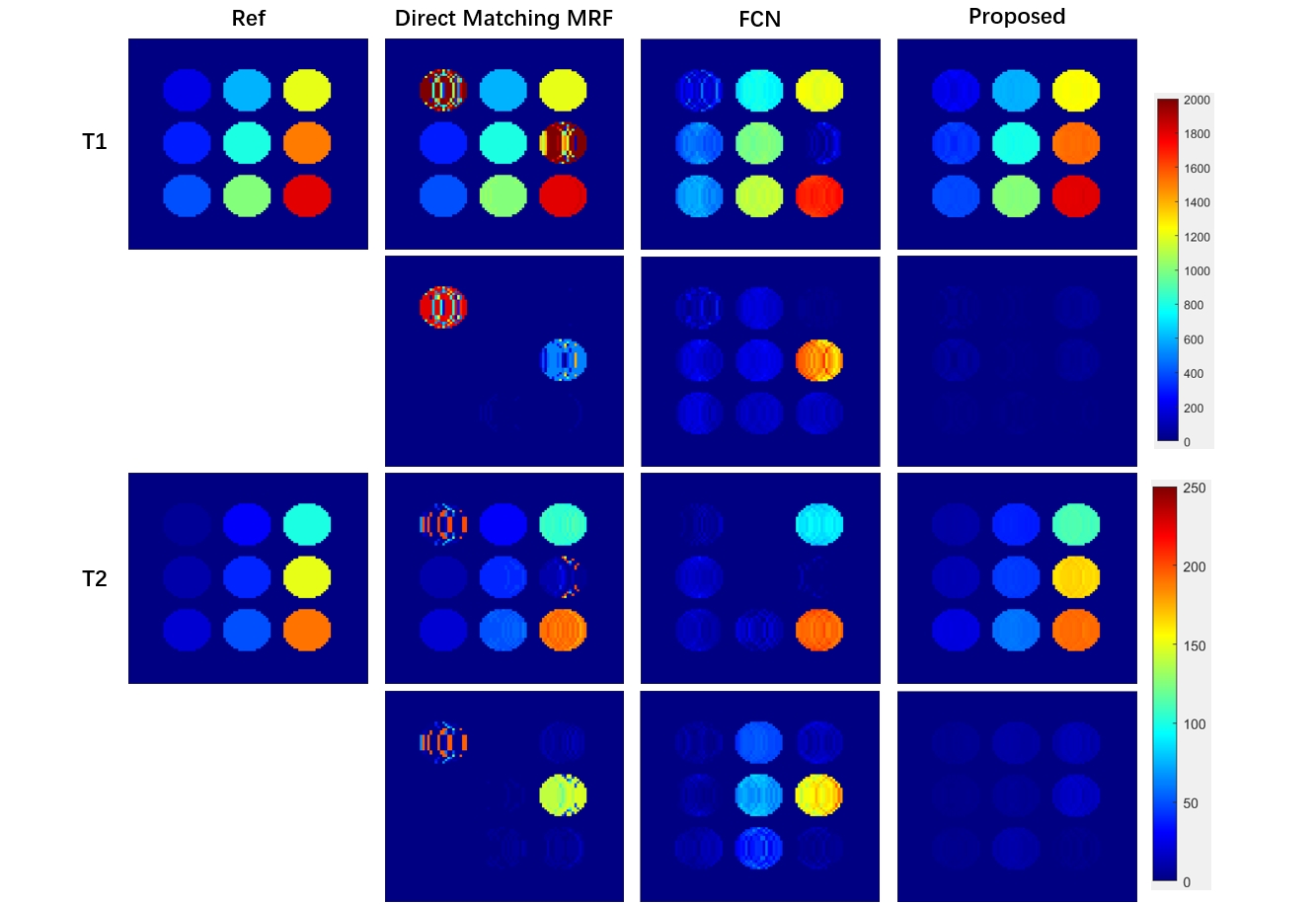
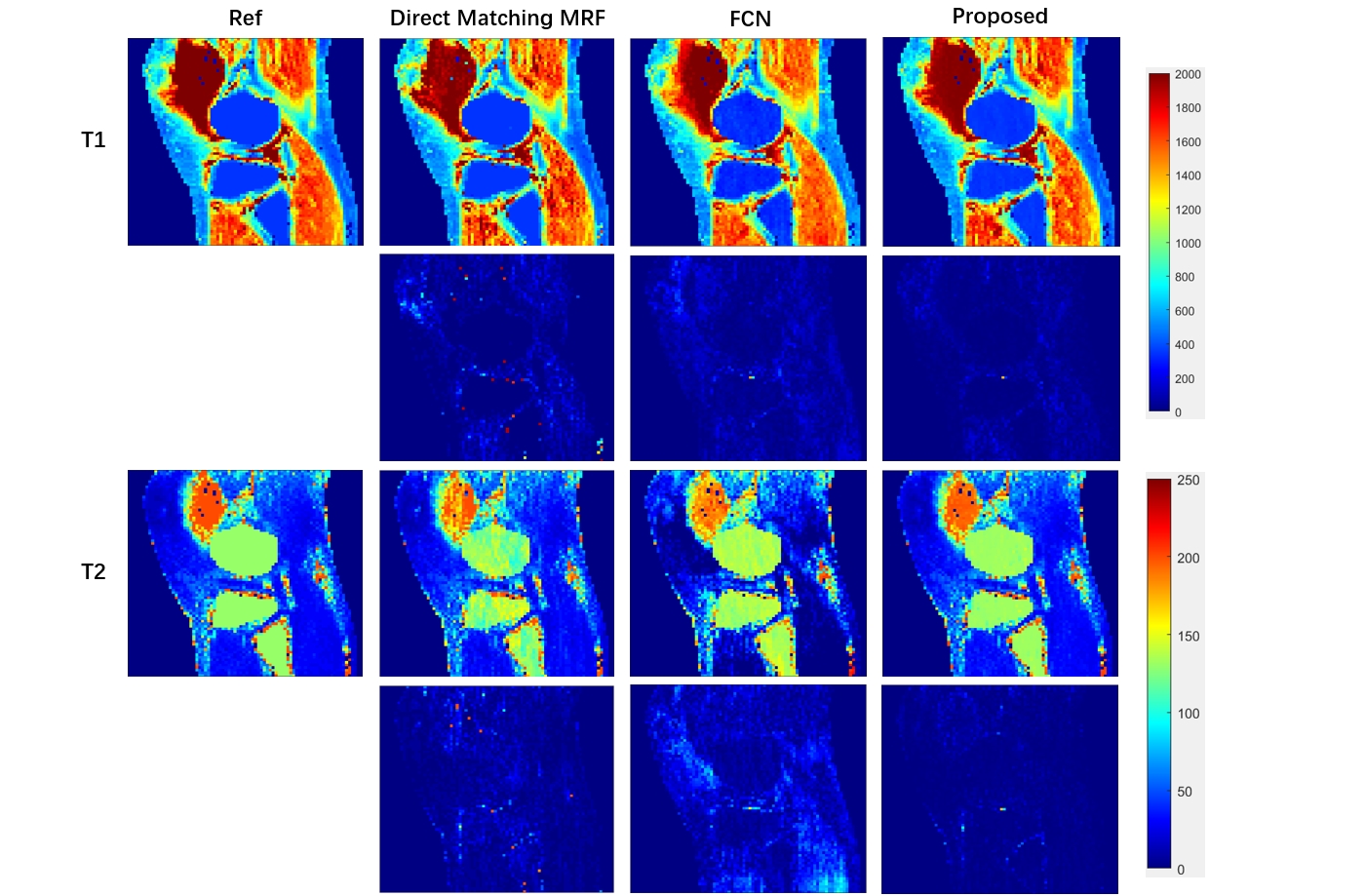
Figures 2 and 3 show the reconstructed T1 and T2 maps of the cylinder phantom and digital knee phantom, respectively, using direct matching MRF [1], an FCN (as used in DRONE [6]), and proposed transformer network. The difference map shows that proposed method can generate more accurate quantitative maps than pattern matching and is robust to different structures in the image.Conclusion
In this study, we proposed a transform network and a novel training process for MRF using deep learning. Experimental results demonstrate that our method can achieve accurate and robust T1 and T2 quantifications than existing methods.Acknowledgements
This work was supported in part by NIH/NIAMS R01AR077452 and NIH/NIA K25AG070321.References
[1] Ma D, Gulani V, Seiberlich N, et al. Magnetic resonance fingerprinting. Nature. 2013;495:187-192.
[2] Zhao B, Setsompop K, Adalsteinsson E, et al. Improved magnetic resonance fingerprinting reconstruction with low‐rank and subspace modeling. Magnetic resonance in medicine. 2018;79(2):933-942.
[3] Yang M, Ma D, Jiang Y, et al. Low rank approximation methods for MR fingerprinting with large scale dictionaries. Magnetic resonance in medicine. 2018;79(4):2392-2400.
[4] Davies M, Puy G, Vandergheynst P, Wiaux Y. A compressed sensing framework for magnetic resonance fingerprinting. SIAM J Imaging Sci 2014;7:2623–2656.
[5] Mcgivney D, Pierre E, Ma D, Jiang Y, Saybasili H, Gulani V, Griswold M. SVD compression for magnetic resonance fingerprinting in the time domain. IEEE Trans Med Imaging 2014;33:2311–2322.
[6] Cohen O, Zhu B, Rosen MS. MR fingerprinting Deep RecOnstruction NEtwork (DRONE). Magn Reson Med. 2018;80(3):885-894. doi:10.1002/mrm.27198
[7] Fang Z, Chen Y, Liu M, et al. Deep Learning for Fast and Spatially Constrained Tissue Quantification From Highly Accelerated Data in Magnetic Resonance Fingerprinting. IEEE Trans Med Imaging. 2019;38(10):2364-2374. doi:10.1109/TMI.2019.2899328
[8] Liu J, Saloner D. Accelerated MRI with CIRcular Cartesian UnderSampling (CIRCUS): a variable density Cartesian sampling strategy for compressed sensing and parallel imaging. Quantitative imaging in medicine and surgery. 2014;4(1):57.
[9] Jiang Y, Ma D, Seiberlich N, Gulani V, Griswold MA. MR fingerprinting using fast imaging with steady state precession (FISP) with spiral readout. Magn Reson Med. 2015;74(6):1621-1631. doi:10.1002/mrm.25559
[10] Ashish Vaswani, Noam Shazeer, Niki Parmar, Jakob Uszkoreit, Llion Jones, Aidan N Gomez, Łukasz Kaiser, and Illia Polosukhin. Attention is all you need. NIPS, 2017.
[11] Gold GE, Han E, Stainsby J, Wright G, Brittain J, Beaulieu C. Musculoskeletal MRI at 3.0 T: relaxation times and image contrast. AJR Am J Roentgenol. 2004;183(2):343-351. doi:10.2214/ajr.183.2.1830343
[12] Krämer M, Maggioni MB, Brisson NM, et al. T1 and T2* mapping of the human quadriceps and patellar tendons using ultra-short echo-time (UTE) imaging and bivariate relaxation parameter-based volumetric visualization. Magn Reson Imaging. 2019;63:29-36. doi:10.1016/j.mri.2019.07.015
Figures