3567
Improved 3D Prostate MR Fingerprinting with Cross-Domain Spatio-Temporal Reconstruction Network1Department of Electrical and Electronic Engineering, Yonsei University, Seoul, Korea, Republic of, 2Siemens Healthineers Ltd, Siemens Korea, Seoul, Korea, Republic of, 3Department of Radiology, Eunpyeong St. Mary’s Hospital, College of Medicine, The Catholic University of Korea, Seoul, Korea, Republic of
Synopsis
Keywords: MR Fingerprinting, MR Fingerprinting
Motivation: 3D Magnetic Resonance Fingerprinting is time-consuming, requiring full-time measurements. Shortening scan time while maintaining data quality enhances MRF's clinical utility.
Goal(s): Our goal was to develop reconstruction process for prostate MRF based on the neural network. This approach aims to improve image quality and parameter map accuracy.
Approach: We introduced the neural network composed of a combination of CNN and ANN and utilized compressed dictionary, enabling efficient cross-domain utilization of information.
Results: Our approach enhances quality and accuracy of generated parameter maps, demonstrating the potential to expedite MRF scans for prostate imaging.
Impact: Our proposed scheme for accelerated MRF reconstruction can improve quantitative imaging, thus providing faster and more accurate prostate diagnosis and treatment. This development has positive impacts on patient care, reduces scanning times, and promotes additional research in medical image reconstruction.
Introduction
Magnetic Resonance Fingerprinting (MRF)1,2 is a technique that generates unique signal patterns for different tissue types by continuously varying parameters. These signal patterns are then compared to a predefined dictionary with expected signal patterns using a pattern matching algorithm. Though the advantage of MRF is its robustness to errors, acquiring full MRF data is time-consuming, causing challenges related to scan time and under-sampling issues that introduce artifacts and variations in parameter maps. To address these challenges, we introduce a neural network-based approach for accelerated prostate MRF reconstruction, leveraging both spatial and temporal information3,4 in a cross-domain manner5. This approach results improved image quality and accurate parameter map matching. This is achieved by utilizing a compressed dictionary in the reconstruction process6, ultimately enhancing the efficiency of MRF for prostate imaging.Methods
[Data Acquisition & Processing]The data used for this study consists of prostate MRF obtained through a hybrid 3D radial-interleaved echo-planar imaging7. 32 radial spokes with golden angle rotation were scanned over 960 measurements with sinusoidal flip angle and fixed repetition time (TR). The specific image acquisition parameters were as follows: Field of View (FOV) = 160mm x 160mm x 72mm, Resolution = 0.6mm x 0.6mm x 3mm, TR = 16ms, TE = 4ms, Total scan time = 18:31 minutes.
MRF data was augmented using a sampling strategy that involved extracting four distinct subsets, each comprising eight spokes, from the original 32-spoke dataset. These subsets formed the training dataset, while the complete 32-spoke dataset served as the reference for the proposed neural network. This approach to data augmentation expanded the diversity of the training dataset and improved model generalization and robustness.
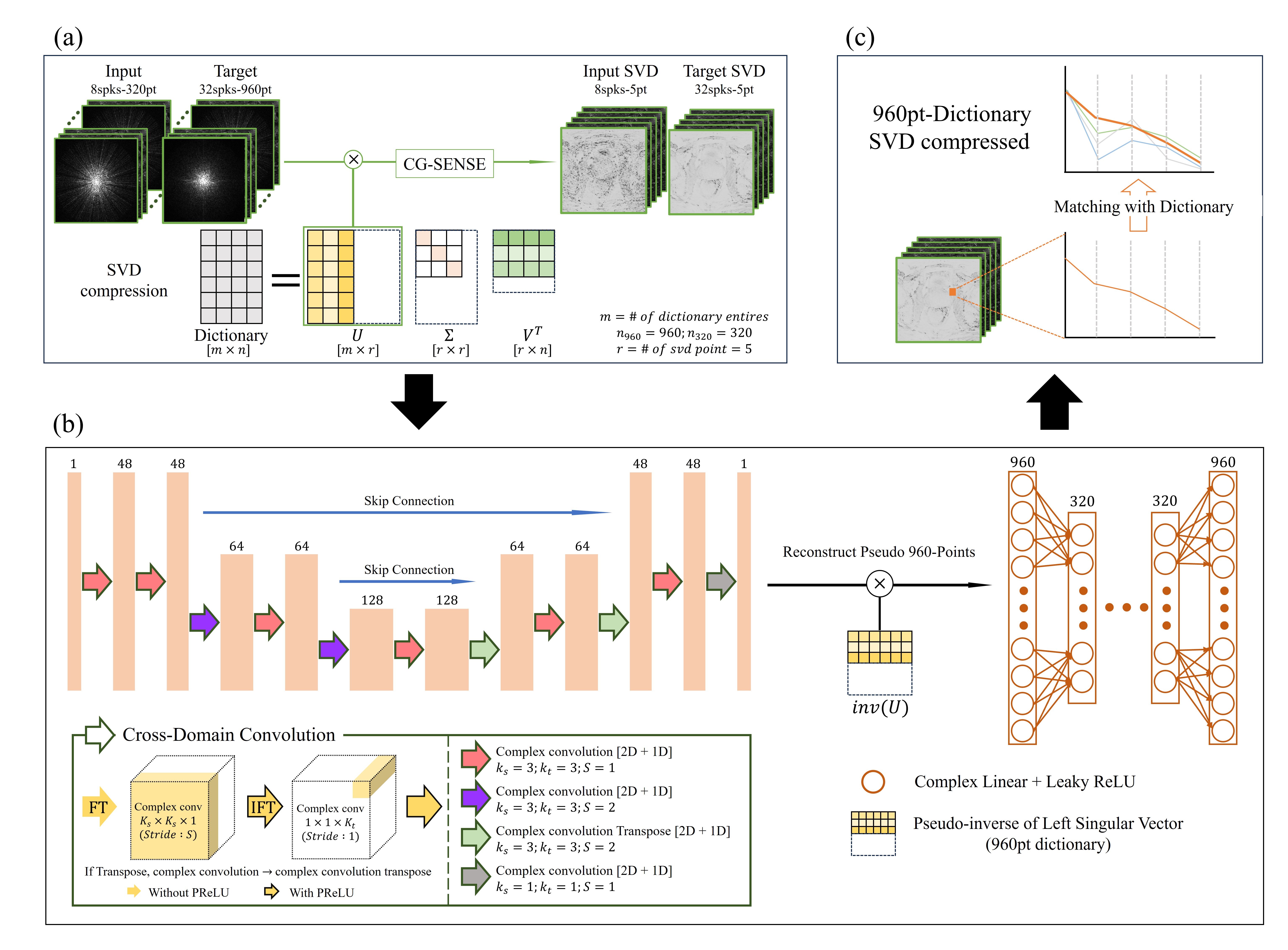
Figure 1(a) outlines the data processing for 3D MRF. To reduce the computational load associated with full-time measurements, we compressed the 320-measurements under-sampled data and the 960-measurement reference into 5 points using singular value decomposition (SVD). Subsequently, we reconstructed the data into images using the BART Toolbox8. Sensitivity maps, obtained through the ESPIRiT9 technique, were utilized for coil combination, and the conjugate gradient SENSE (CG-SENSE)10 reconstruction was applied. Each subject was divided into slices, and normalization was performed based on the timepoints.
[Reconstruction Network]
In Figure 1(b), we present our network's architecture for reconstructing under-sampled images into fully sampled ones. The network consists of two key components: the first recovers missing radial spoke information, and the second restores un-acquired time measurements.
The first network part of the network follows the U-Net11 framework and employs complex convolution, capable of processing both magnitude and phase information simultaneously. These complex convolution layers are further divided into 2D and 1D convolution layers, with Fourier transforms applied before and after the 2D convolution. This approach allows the first part to effectively utilize spatial and temporal information separately, enhancing the utilization of MRF’s unique characteristics. The Fourier transform aids the network in learning spatial information in the frequency domain, reducing the image blurriness commonly associated with traditional CNN methods. The second part is an Artificial Neural Network that takes the pseudo-960-point output from the first part as input. In this process, pseudo-time measurements are generated using the left singular vectors obtained from the predefined dictionary's SVD. This design enables the second part to convey information beyond the initial 320-time measurements, resulting in a comprehensive reconstruction approach.
For the matching process, a dictionary was simulated for 960-time measurements and compressed to 5 using SVD, covering T1 range from 50ms to 4000ms and T2 range from 5ms to 400ms. To generate parameter maps, we employed pixel-wise dictionary matching, utilizing complex inner product.
Results
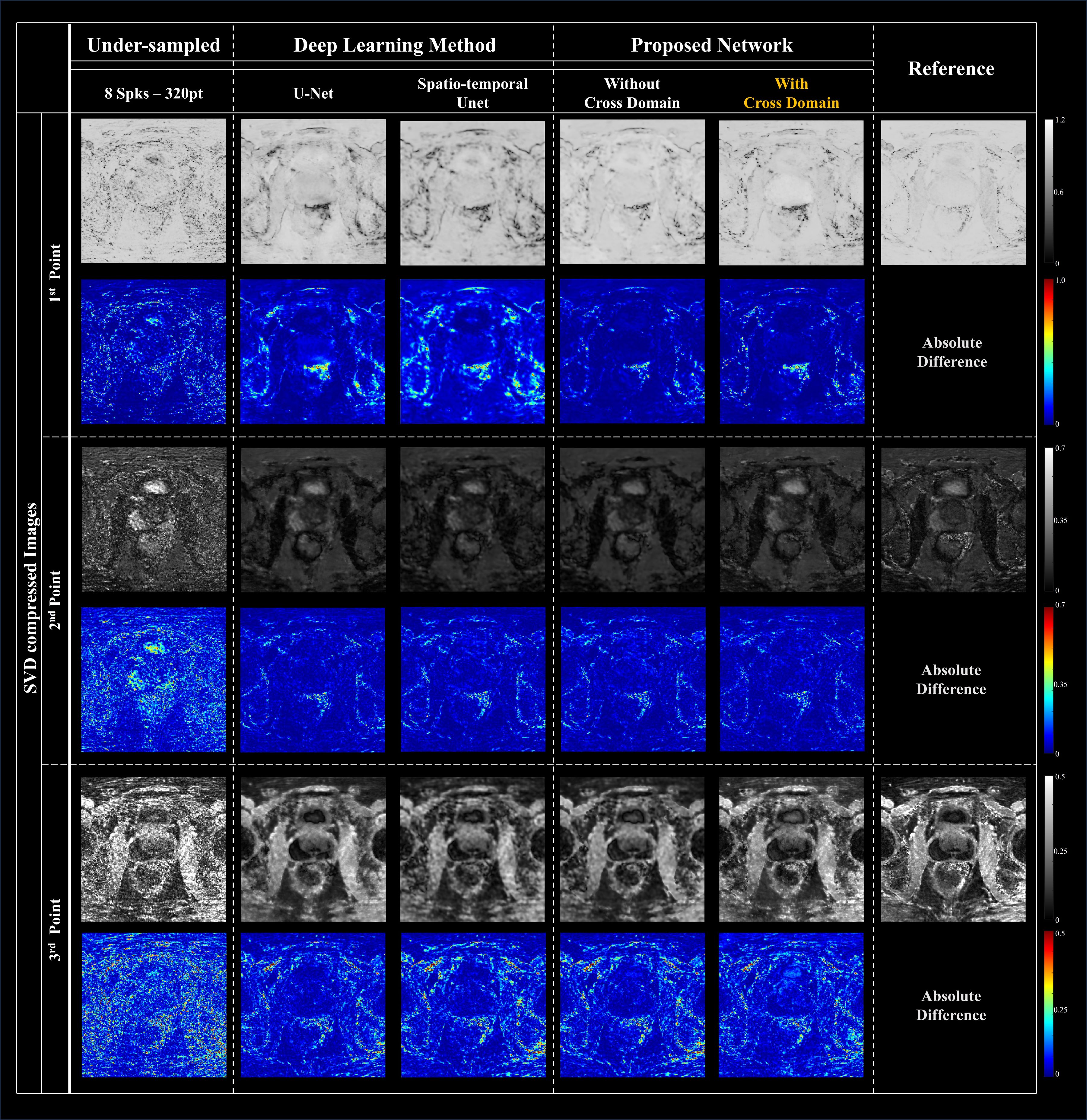
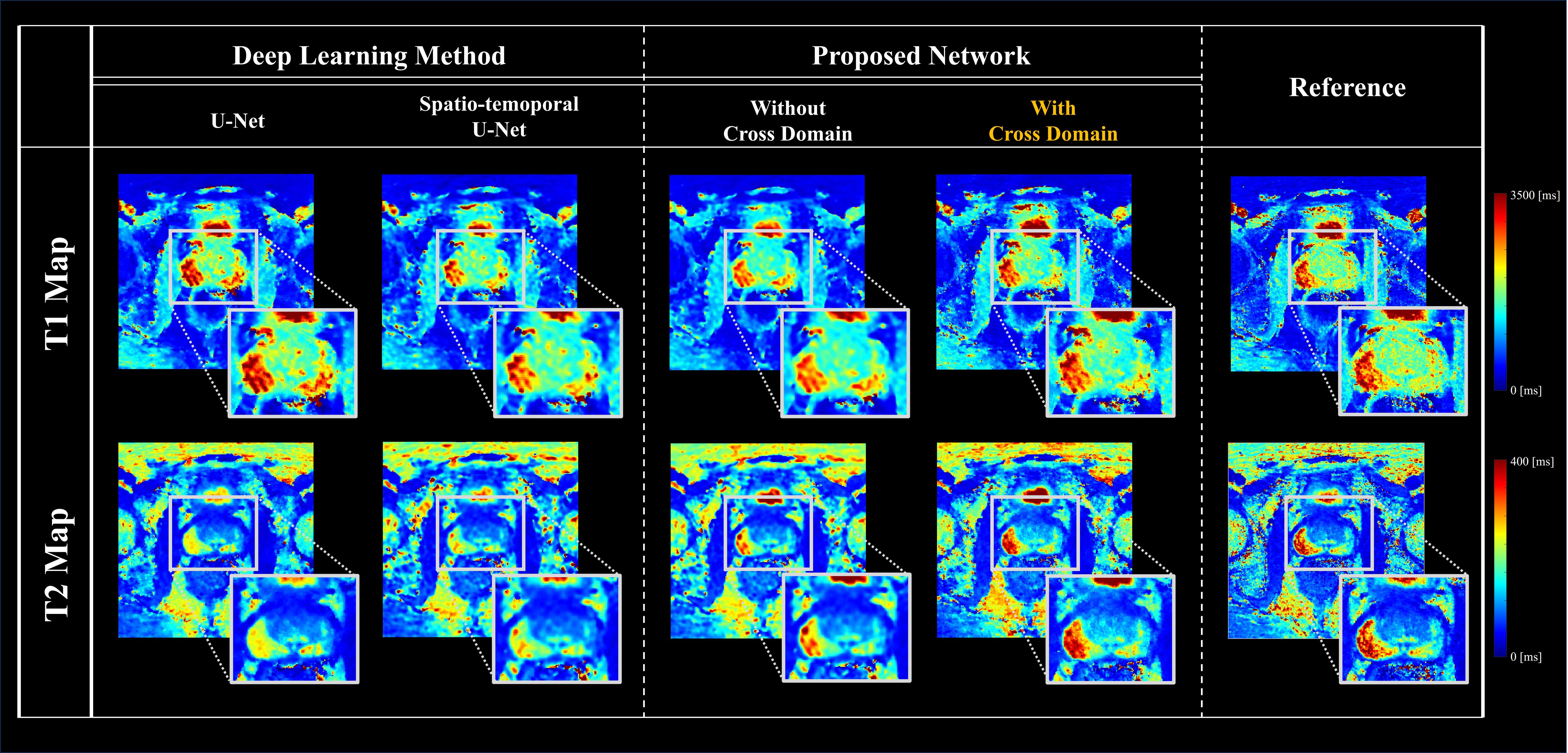
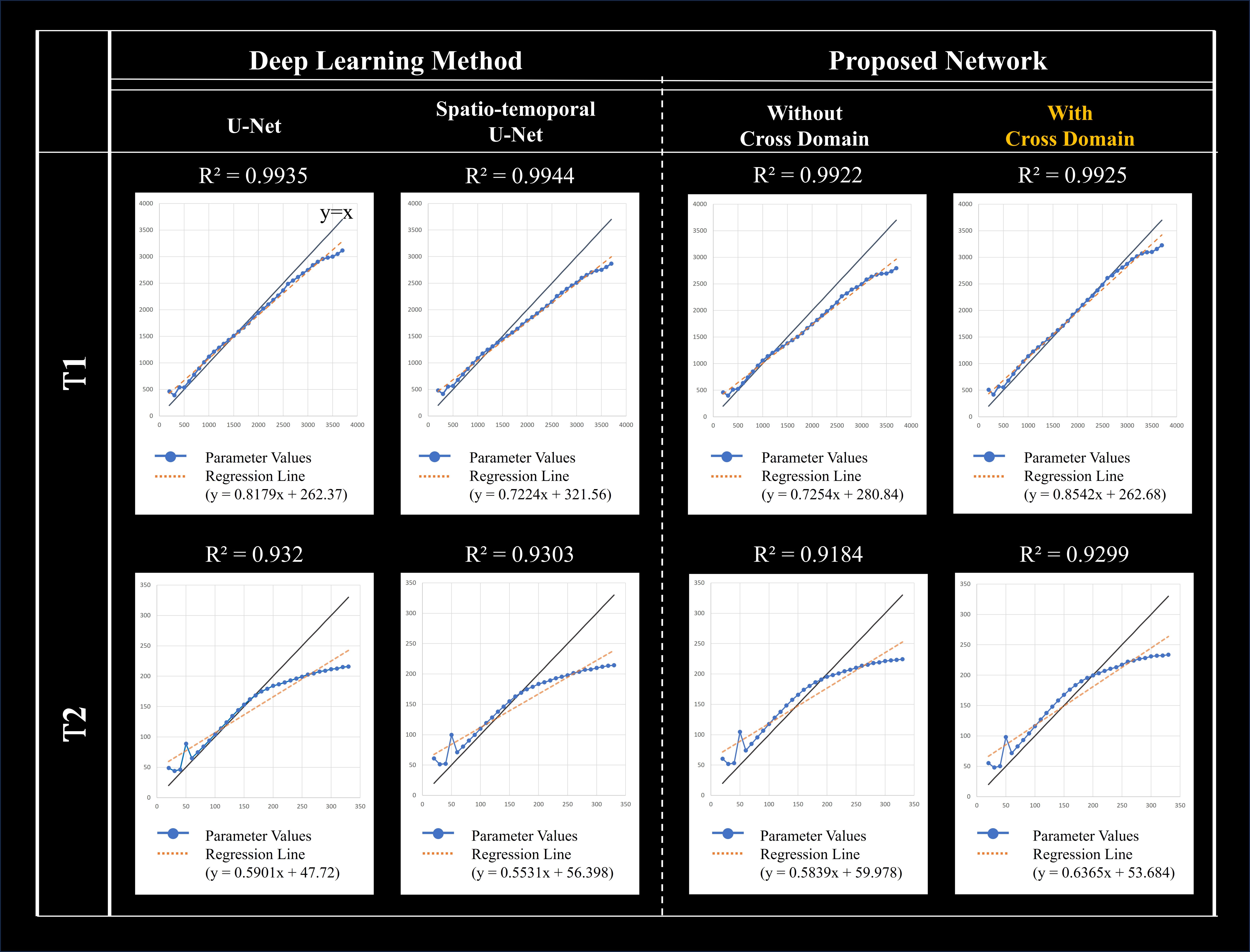
Figure 2 and 3 display the output of the proposed network and the resulting T1 and T2 maps through dictionary matching. These figures also provide a comparison between other models. The approach with cross-domain exhibited better parameter map quality. Figure 4 shows the comparison of fitted T1 and T2 values of the various networks and proposed approach with parameter values from reference image. From the graph, proposed method showed the smallest value difference compared to the reference.Discussion and Conclusion
In this study, we introduced a cross-domain and spatio-temporal neural network to accelerate 3D prostate MRF reconstruction. Our approach has enhanced the quality of T1 and T2 maps by addressing blurriness and imprecise estimation issues, leading to more accurate parameter mapping. It has also shown promise in generating unmeasured time measurements, potentially reducing scan times and improving data efficiency. However, further refinements are required for accurate pixel-wise time signal reconstruction. These improvements have the potential to enhance the efficiency and precision of quantitative mapping in MRF.Acknowledgements
This research was supported by the MSIT(Ministry of Science and ICT), Korea, under the ITRC(Information Technology Research Center) support program(IITP-2022-2020-0-01461) supervised by the IITP(Institute for Information & communications Technology Planning & Evaluation)References
1. Ma D, Gulani V, Seiberlich N, et al. Magnetic resonance fingerprinting. Nature, 2013;495(7440):187-192.
2. Jiang Y, Ma D, Seiberlich N, et al. MR fingerprinting using fast imaging with steady state precession (FISP) with spiral readout. Magn Reson Med, 2015;74(6):1621-1631.
3. Lee J-H, Yi J, Kim J-H, et al. Accelerated 3D myelin water imaging using joint spatio-temporal reconstruction. Med Phys. 2022;49(9):5929-5942.
4. Qiu Z, Yao T; and Mei T., Learning spatio-temporal representation with pseudo-3d residual networks. In: proceedings of the IEEE International Conference on Computer Vision. 2017;5533-5541.
5. El‐Rewaidy H, Fahmy A, Pashakhanloo F, et al. Multi‐domain convolutional neural network (MD‐CNN) for radial reconstruction of dynamic cardiac MRI. Magnetic Resonance in Medicine, 2021, 85.3: 1195-1208.
6. McGivney D, Pierre E, Ma D, et al. SVD compression for magnetic resonance fingerprinting in the time domain. IEEE transactions on medical imaging, 2014, 33.12: 2311-2322.
7. Han, D, Hong T, Lee Y, et al. High Resolution 3D Magnetic Resonance Fingerprinting with Hybrid Radial-Interleaved EPI Acquisition for Knee Cartilage T 1, T 2 Mapping. Investigative Magnetic Resonance Imaging, 2021, 25.3: 141-155.
8. Uecker M, Tamir J I., Ong F, et al. The BART toolbox for computational magnetic resonance imaging. In: Proc Intl Soc Magn Reson Med. 2016.
9. Uecker M, Lai P, Murphy M J., et al. ESPIRiT-An eigenvalue approach to autocalibrating parallel MRI: Where SENSE meets GRAPPA. Magn Reson Med 2014;71(3):990-1001.
10. Pruessmann K P., Weiger M, Börnert P, et al. Advances in sensitivity encoding with arbitrary k‐space trajectories. Magnetic Resonance in Medicine: An Official Journal of the International Society for Magnetic Resonance in Medicine, 2001;46(4):638-651.
11. Ronneberger O, Fischer P, and Brox T. U-net: Convolutional networks for biomedical image segmentation. In: International Conference on Medical image computing and computer-assisted intervention. Springer, Cham, 2015;234-241.
Figures