3296
Rapid ∆B0 Field Mapping for Real-Time Shimming of Human Brain1Siemens Medical Solutions, USA, Inc.,, Malvern, PA, United States, 2Athinoula A. Martinos Center for Biomedical Imaging, Massachusetts General Hospital, Charlestown, MA, USA, Charlestown, MA, United States, 3Department of Radiology, Harvard Medical School, Boston, MA, United States, 4Department of Electrical Engineering and Computer Science, Massachusetts Institute of Technology, Cambridge, MA, United States
Synopsis
Keywords: Parallel Imaging, Motion Correction, fast B0 field mapping, EPI navigator, shimming
Motivation: High-quality MRI demands accurate ∆B0 field mapping. Traditional field mapping methods cannot address motion-induced susceptibility changes during acquisition. A rapid navigator can achieve real-time motion correction with accurate shim and frequency updates.
Goal(s): Develop a rapid navigator to achieve accurate field maps for real time motion correction applications.
Approach: We developed GRAPPA accelerated dual-echo EPI-vNavs of rapid ∆B0 field mapping. We compared field mapping and shim current accuracy of vNavs at different resolutions and accelerations to 3D-GRE in scanner-based 2SH and multi-coil shimming.
Results: The field maps generated with accelerated vNavs closely matched 3D-GRE field maps and accurately determined shim currents.
Impact: Accelerated dual-echo EPI vNavs provide rapid, accurate field mapping, reducing feedback delays. This research provides valuable insights into impact of acceleration and resolution in vNav-based field mapping, to benefit various MRI applications in mitigating susceptibility artifacts arising from motion-induced changes.
INTRODUCTION
Accurate ∆B0 field mapping is essential for high-quality MRI. Typically, shim optimization is performed at the start of the scan. However, changes in position due to motion and respiration during the scan result in signal degradation and inaccuracy. We have previously demonstrated a robust method for real-time motion correction using Echo Planar Imaging (EPI) based volumetric navigators (vNavs) for spectroscopic imaging 1,2,3. In this study, we investigate the potential of using dual-echo EPI-vNavs with Generalized Autocalibrating Partially Parallel Acquisition (GRAPPA) acceleration for rapid ∆B0 field mapping in MRI. We compare the performance of EPI vNavs to traditional 3D Gradient Echo (GRE) field maps and assess their suitability for real-time motion correction with minimal feedback delays. We further demonstrate the feasibility of using accelerated vNavs in estimating shims for a scanner's spherical harmonic, a 32-channel AC/DC shim array4,5, and their combination.METHODS
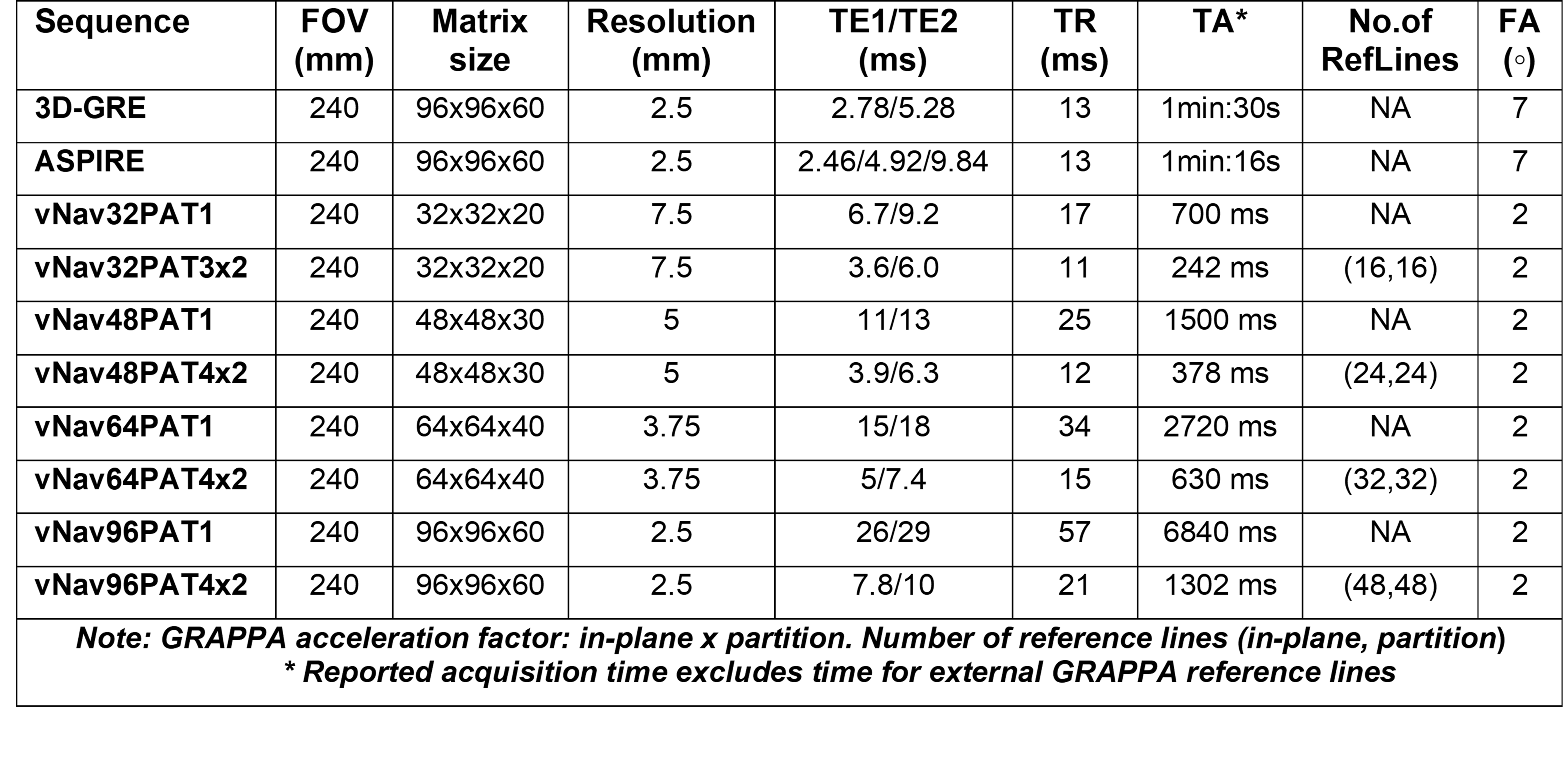
The protocols were implemented on a 3T whole-body MRI system (MAGNETOM Prisma, Siemens Healthcare, Erlangen, Germany). In vivo data was acquired from 11 subjects (6 patients and 5 healthy) using a standard 32 channel head coil. The reference ∆B0 field maps were obtained using a standard dual-echo 3D-GRE sequence. The performance of a 3-echo 3D ASPIRE (Amplitude Susceptibility-weighted Phase imaging for Resolving Microstructure)6 and 8 prototype dual-echo 3D-EPI based vNavs, encompassing four different spatial resolutions and GRAPPA acceleration, were assessed. The imaging parameters are summarized in Figure 1. The ∆B0 field maps for ASPIRE sequence were generated online with ROMEO (Regularization Of Magnetic Resonance Phase for Extra-cerebral Water Removal) unwrapping6. The 3D-GRE and vNav data were processed offline on MATLAB (Mathworks, Natick, MA, USA). Channel-wise phase difference maps were evaluated and combined. Brain Extraction tool (BET)7 was used on 3D-GRE magnitude images to generate a common brain mask. The brain mask was applied to the phase difference followed by phase unwrapping using FSL prelude tool8. For voxel-to-voxel comparison, the low resolution vNav ∆B0 maps were interpolated to the same resolution as the 3D-GRE ∆B0 maps.Shimming experiment was performed on a volunteer using a 32-channel multi-coil AC/DC shim array. The set of un-shimmed ∆B0 field maps were acquired for 3D-GRE, ASPIRE and vNavs with the same protocol as in Figure 1 using the scanner tune-up shims. The shim currents were estimated on MATLAB using the respective field maps for linear and 2nd order spherical harmonic scanner shims, 32-channel multi-coil, and their combination. The estimated shims were applied prospectively4,5 to acquire shimmed 3D-GRE ∆B0 field maps.
RESULTS
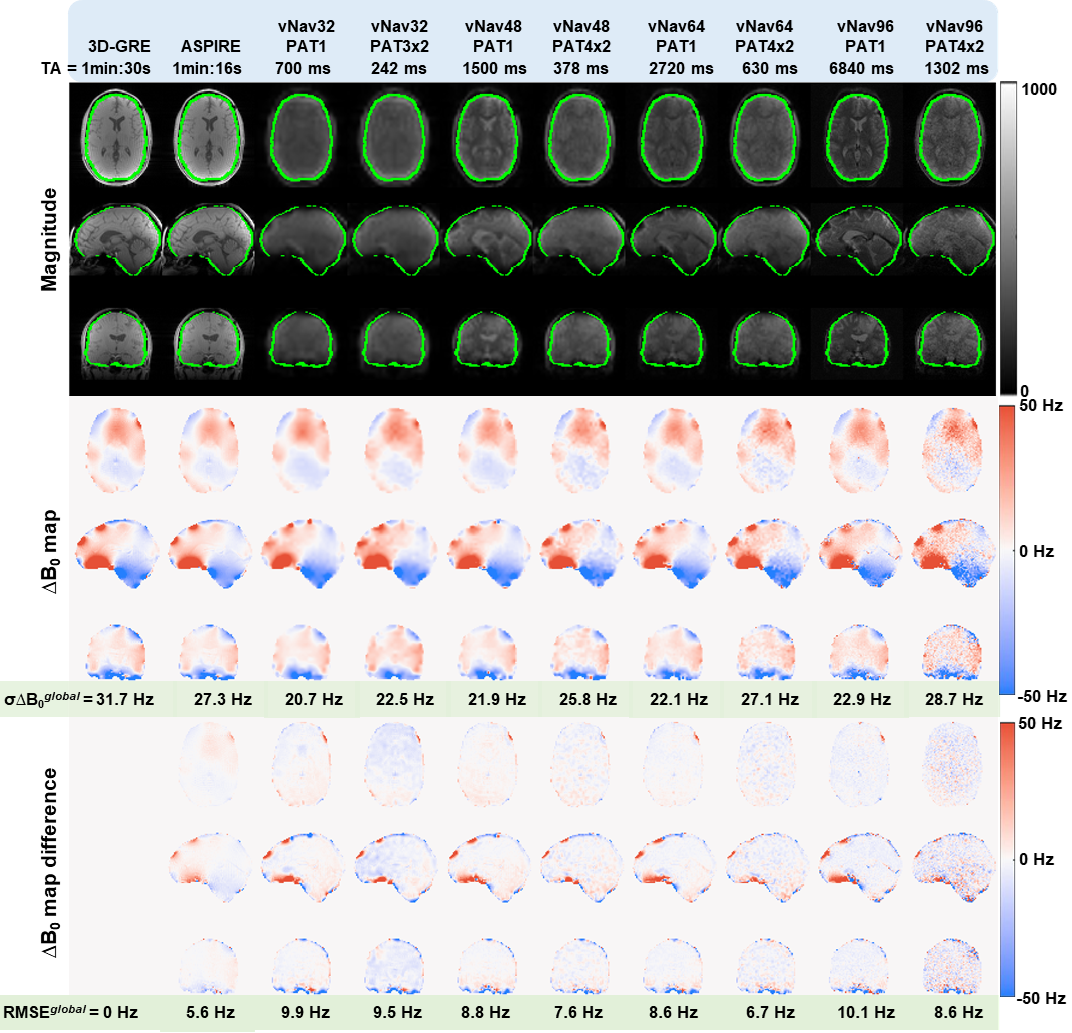
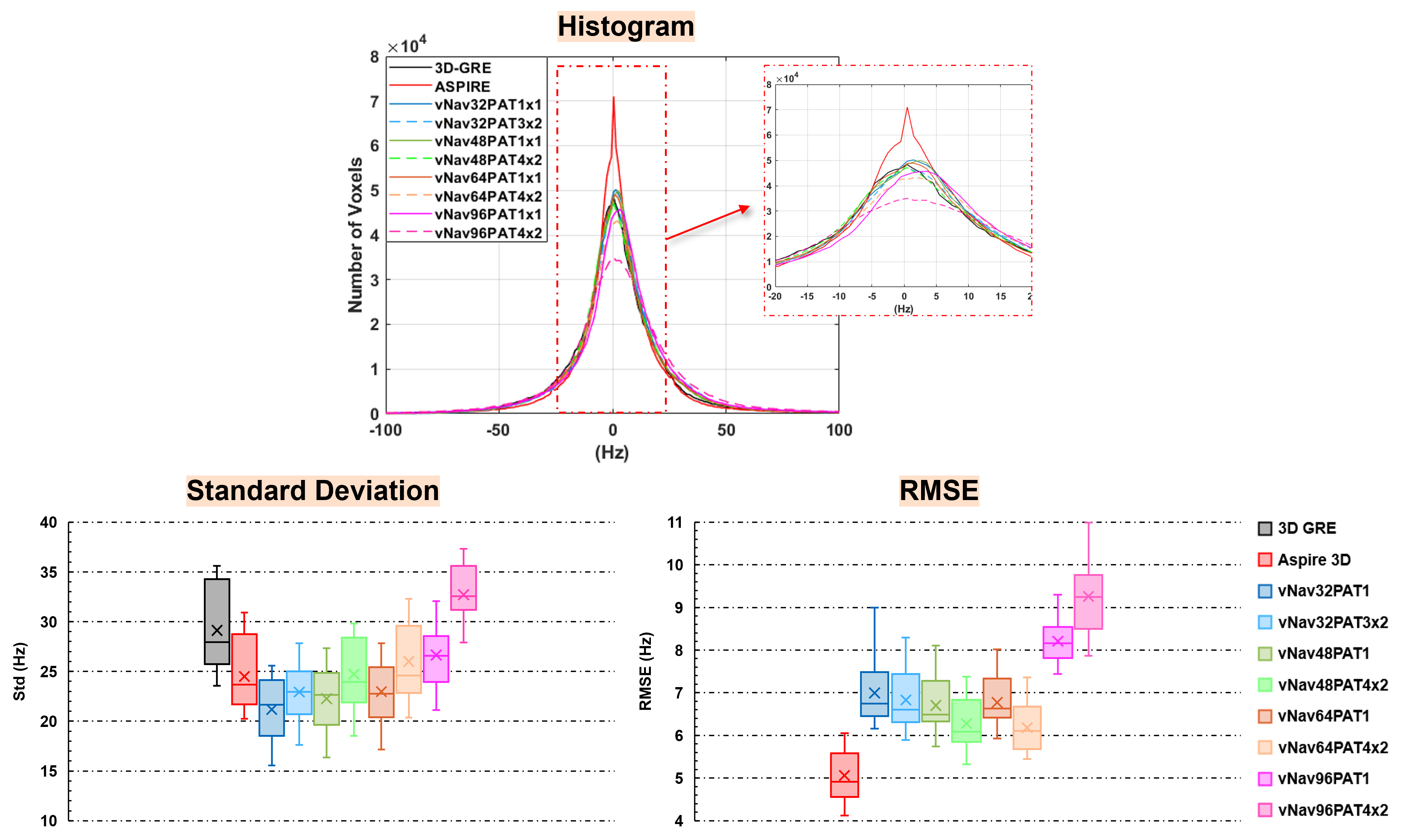
Figure 2. shows the representative ∆B0 field maps from 3D-GRE, ASPIRE and 8 vNav protocols. The ASPIRE and vNav ∆B0 maps are in close agreement to the 3D-GRE ∆B0 maps with negligible image distortion. The greatest differences are observed in close to the skull base and frontal sinus due to ∆B0 inhomogeneity.Figure 3 shows the histogram, standard deviation and root mean squared error (RMSE) for all 11 subjects. The histogram for ASPIRE reveals a large fraction of voxels close to 0 Hz and the least RMSE, indicating superior field mapping performance. Among the vNav's the accelerated vNav48PAT4x2 and vNav64PAT4x2 had the lowest RMSE, with histograms that overlap with 3D-GRE. vNav96PAT4x2 shows the most significant differences compared to 3D-GRE.
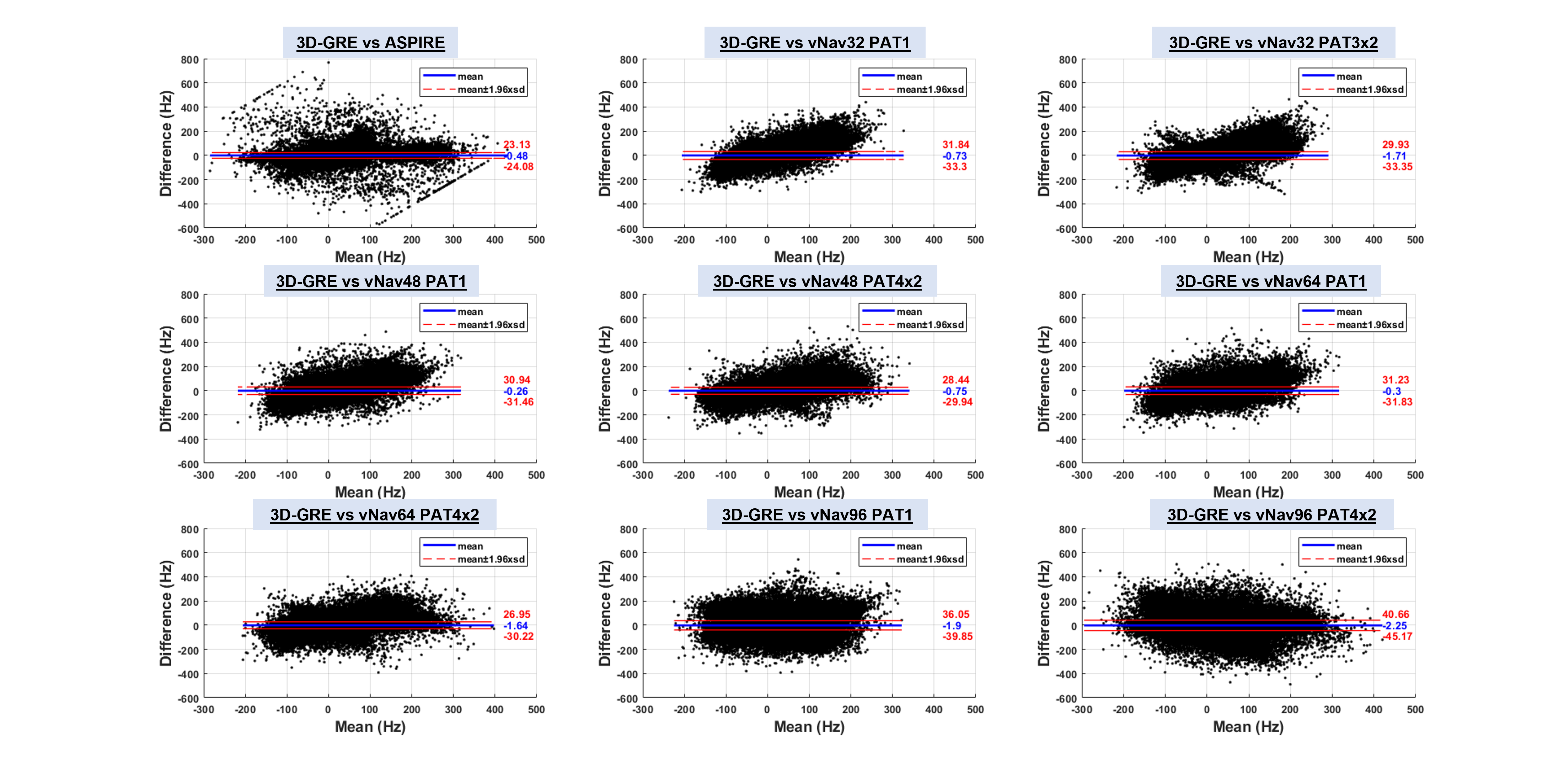
Figure 4 shows the Bland-Altman plots for the pooled data, comparing ASPIRE and vNav field maps to 3D-GRE field maps. Most data points fall within the limits of agreement, with interpolation errors in low-resolution vNavs potentially appearing as bias. Among the vNavs, the mean difference is lowest for vNav48 and vNav64.
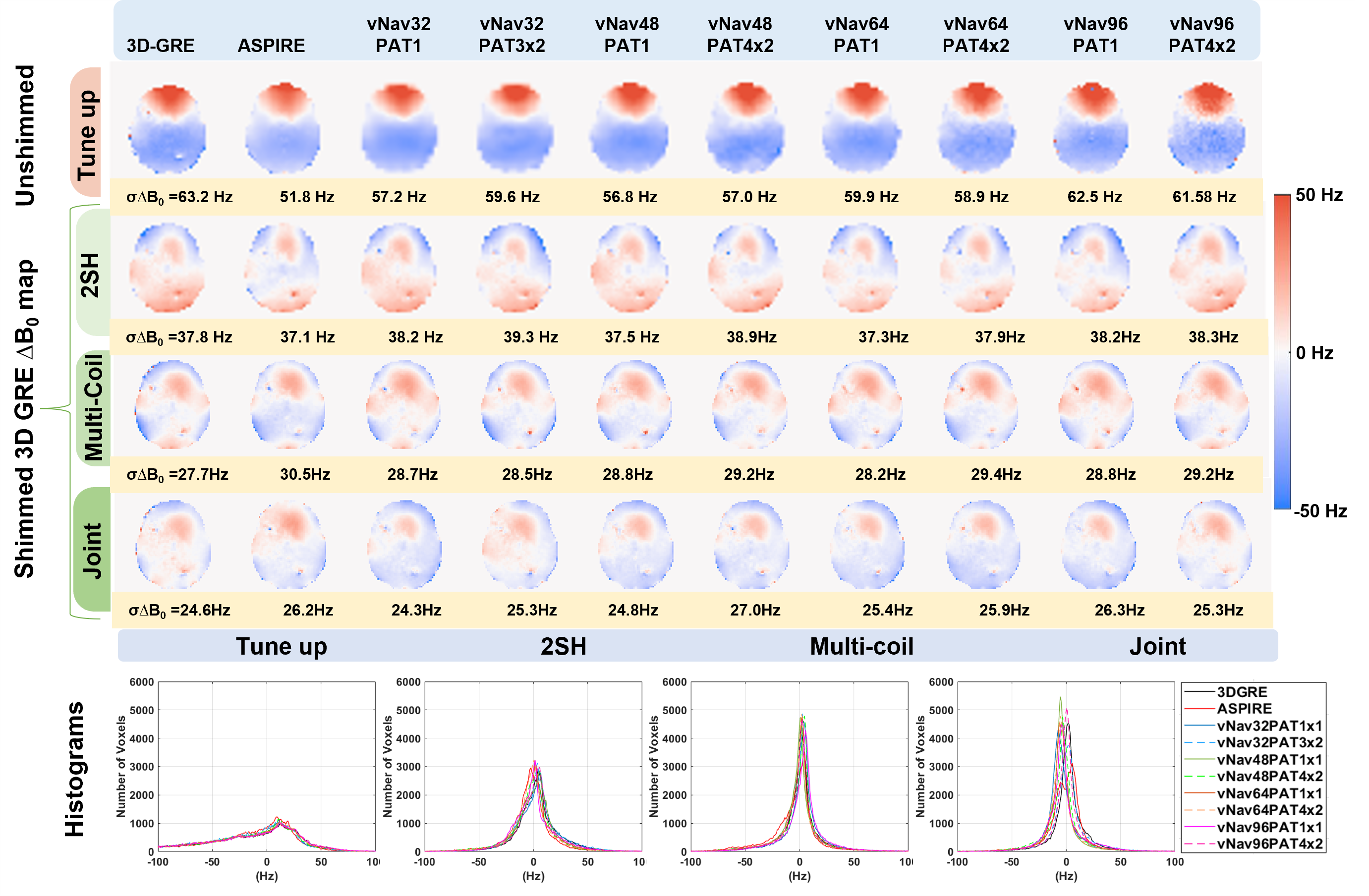
Figure 5 shows the field maps for the shimmed data. The unshimmed data has a large linewidth. The linewidth improves in order from 2SH, to 32-channel AC/DC shimming, to joint shimming. The accelerated navigators provide similar shimming performance compared to longer field mapping methods such as 3D GRE and 3D ASPIRE.
DISCUSSION AND CONCLUSION
We have developed rapid field mapping protocols using dual-Echo EPI vNavs. The accelerated vNav field mapping method demonstrated fidelity to the standard 3D-GRE method. Among the vNavs, the vNav64PAT4x2 and vNav48PAT4x2 exhibited the least errors. In particular, vNav48PAT4x2 is shorter than 0.5s and would have minimal impact on the acquisition time of parent sequence. Motion correction in MR spectroscopic imaging1-3,5 could readily benefit from integration of accelerated vNavs. We anticipate that high-resolution accelerated navigators will benefit MRI applications, especially in the context of large susceptibility at the skull base and motion induced changes. Acceleration allows trade-offs between spatial resolution and speed that can be tailored to specific applications.Acknowledgements
NIH/NCI grants R01CA255479, 2R01CA211080-06A1, R01HD093578, R01HD099846, R01AG079422, R21EB029641, R01HD110152References
- Aaron T Hess, Ovidiu C Andronesi, M Dylan Tisdall, A Gregory Sorensen, André JW van der Kouwe, and Ernesta M Meintjes. Real-time motion and b0 correction for localized adiabatic selective refocusing (laser) mrsi using echo planar imaging volumetric navigators. NMR in Biomedicine, 25(2):347–358, 2012.
- Wolfgang Bogner, Aaron T Hess, Borjan Gagoski, M Dylan Tisdall, Andre JW van der Kouwe, Siegfried Trattnig, Bruce Rosen, and Ovidiu C Andronesi. Real-time motion-and b0-correction for laser-localized spiral-accelerated 3d-mrsi of the brain at 3 t. Neuroimage, 88:22–31, 2014.
- Yulin Chang, Daniel Nicolas Splitthoff, Wei-ching Lo, M. Dylan Tisdall, and Andre van der Kouwe. Accelerated 3D EPI navigator for prospective motion correction. ISMRM 2022;1954
- Jason P Stockmann, Thomas Witzel, Boris Keil, Jonathan R Polimeni, Azma Mareyam, Cristen LaPierre, Kawin Setsompop, and Lawrence L Wald. A 32-channel combined rf and b0 shim array for 3t brain imaging. Magnetic resonance in medicine, 75(1):441–451, 2016.
- Esmaeili M, Stockmann J, Strasser B, Arango N, Thapa B, Wang Z, van der Kouwe A, Dietrich J, Cahill DP, Batchelor TT, White J, Adalsteinsson E, Wald L, Andronesi OC. An integrated RF-receive/B0-shim array coil boosts performance of whole-brain MR spectroscopic imaging at 7 T. Sci Rep. 2020 Sep 14;10(1):15029. doi: 10.1038/s41598-020-71623-5. PMID: 32929121; PMCID: PMC7490394.
- Eckstein, K., Dymerska, B., Bachrata, B., Bogner, W., Poljanc, K., Trattnig, S. and Robinson, S.D. (2018), Computationally Efficient Combination of Multi channel Phase Data From Multi-echo Acquisitions (ASPIRE). Magn. Reson. Med, 79: 2996-3006. https://doi.org/10.1002/mrm.26963.
- Smith SM. Fast robust automated brain extraction. Hum Brain Mapp. 2002;17:143–155.
- Smith SM, Jenkinson M, Woolrich MW, Beckmann CF, Behrens TEJ, Johansen-Berg H, Bannister PR, De Luca M, Drobnjak I, Flitney DE, et al. Advances in functional and structural MR image analysis and implementation as FSL. Neuroimage. 2004;23:S208–S219.
Figures