3259
MRI Acceleration with Frequency Encoding Subsampling using Double Lobe Gradient (DOGE) Readout Waveform1School of Biomedical Engineering, ShanghaiTech University, Shanghai, China, 2Central Research Institute, United Imaging Healthcare Group, Shanghai, China
Synopsis
Keywords: Pulse Sequence Design, Pulse Sequence Design
Motivation: The current practice of MRI acceleration commonly subsamples K-space along the Phase Encoding (PE) direction, but this approach does not fully address the need for further reduction in scan time.
Goal(s): Our goal was to develop a Frequency Encoding (FE) subsampling technique that reduces scan time while maintaining image quality.
Approach: We introduced the Double Lobe Gradient (DOGE) readout approach, which manipulates the readout gradient waveform to subsample along the FE direction.
Results: The verification of DOGE readout on b-SSFP resulted in a significant reduction of 40% in readout time and 20% reduction in repetition time (TR), while maintaining comparable image quality.
Impact: Our approach exhibits compatibility with existing MRI acceleration techniques, thereby enhancing scan efficiency. Moreover, its potential applicability to other pulse sequences to reduce scan duration could bear substantial implications for clinical practice, potentially revolutionizing patient experience and diagnostic accuracy.
Introduction
Cartesian K-space subsampling is a prevalent technique for MRI scan acceleration, typically performed along the phase encoding (PE) direction. Various reconstruction methods like SENSE$$$^{[1]}$$$ and GRAPPA$$$^{[2]}$$$ have been developed for subsampled K-space. FE subsampling, remains underexplored because the use of the anti-aliasing filter prevents aliasing artifacts from under-sampling, when using conventional readout gradients. This study introduces an FE sampling approach using a Double Lobe Gradient (DOGE) readout, which replaces the standard readout gradient waveform. We demonstrate that such an approach further reduces scan time in addition to accelerations provided by typical parallel imaging and compressed sensing methods.Methods
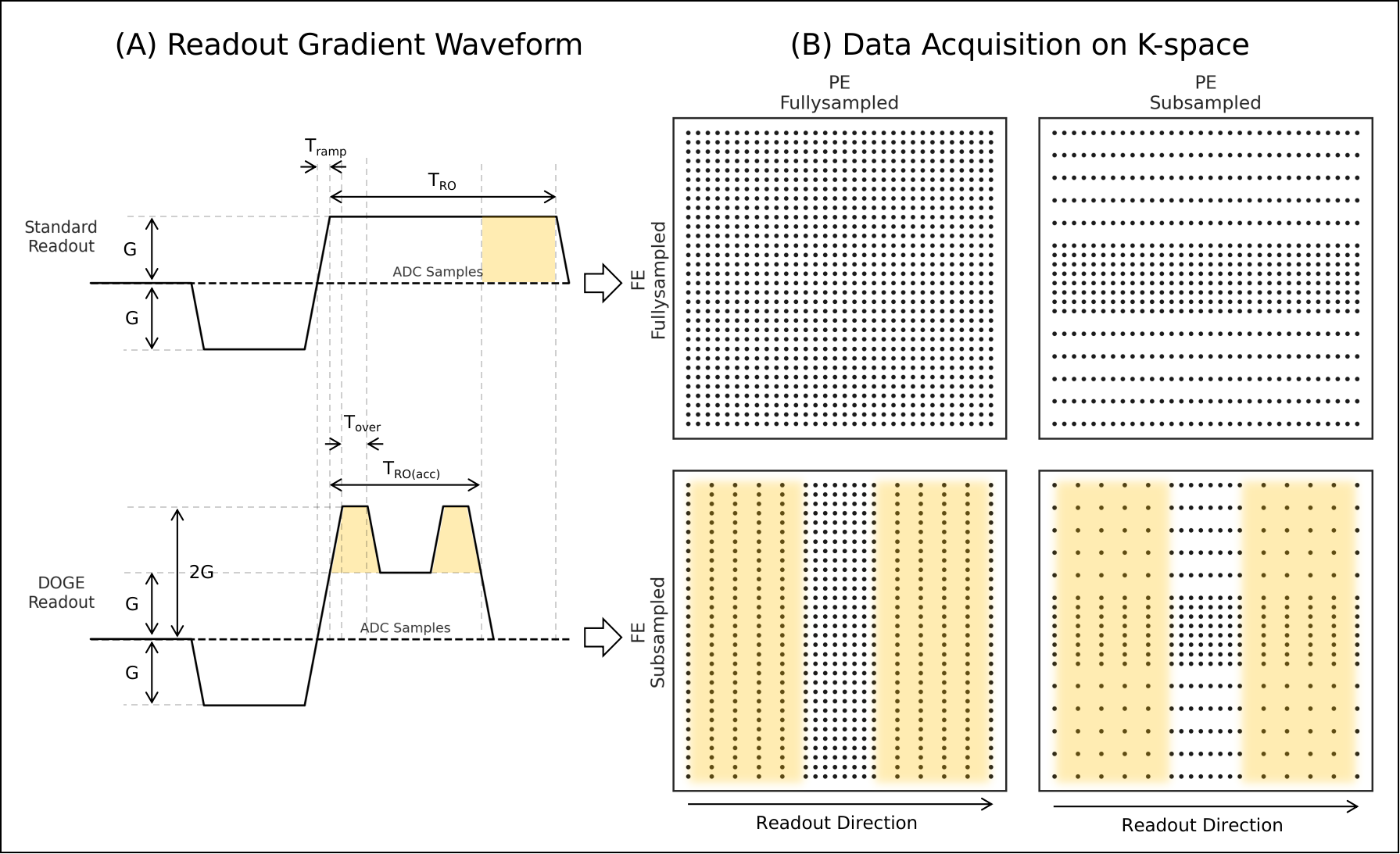
The DOGE readout gradient waveform and data acquisition sampling on K-space are demonstrated in Fig. 1. The amplitude and slew rate of the original gradient remain unchanged, while the duration of the gradient is reduced by the factor "DOGE Rate" $$$DR$$$. To compensate for the reduced gradient area ($$$M_0$$$) and to ensure the constancy of $$$k_{max}$$$, two additional trapezoidal lobes of equivalent amplitude are superimposed on the original gradient, resulting in the readout waveform illustrated in Fig. 1A (bottom row). Theoretically, the DOGE readout waveform is symmetric, and the superimposed lobes are identical. Given the consistent sampling period during the readout, the sampling speed in the peripheral k-space is doubled during the two overlaid lobes compared to the standard sampling speed at the more central region of the k-space. The resultant data sampling pattern is given in Fig. 1B.The introduction of gradient ramp sampling during data acquisition results in non-uniform sampling of K-space along the FE direction. To address the gridding issue, 1-Dimension Non-Uniform Discrete Fourier Transform (1D-NUDFT) $$$^{[3]}$$$ was applied to the subsampled data along FE axis. The samples on K-space are given by $$$k_x(t)=\gamma/2\pi\cdot\int_0^t G(\tau)d\tau$$$, and it follows that $$$\Delta k_x(t)\big|_{t\in Lobe}=2\Delta k_x(t)\big|_{t\notin Lobe}$$$, which enables subsampling along the FE direction.$$\begin{gathered} \omega_x(m)=-\pi+\gamma\int_0^{m\Delta t}G_{RO}(\tau)d\tau\bigg|_{m=0,1,\cdots N_{sub}-1}\\ W_{DOGE}(m,n)=e^{j\omega_x(m)\cdot (n-N_{full}/2)} \big|_{m=0,1,\cdots N_{sub}-1,\ n=0,1,\cdots N_{full}-1}\\ W_{DFT}(m,n)= e^{j(n-N_{full}/2)(m-N_{full}/2)}\big|_{m,n=0,1,\cdots N_{full}-1}\\ S^H_k=W_{DFT}W_{DOGE}^H S_{raw}^H\end{gathered}$$where $$$G_{RO}$$$ denotes the DOGE readout gradient waveform, $$$W_{DOGE}$$$ denotes the ideal NUDFT transform matrix for DOGE readout, $$$W_{DFT}$$$ denotes the DFT weighting matrix, $$$S_{raw}$$$ denotes the raw non-uniform K-space samples, $$$S_{k}$$$ denotes the uniform K-space samples data transformed from $$$S_{raw}$$$, while $$$N_{sub}$$$ and $$$N_full$$$ denoting the number of samples for the subsampled and fully-sampled data respectively.
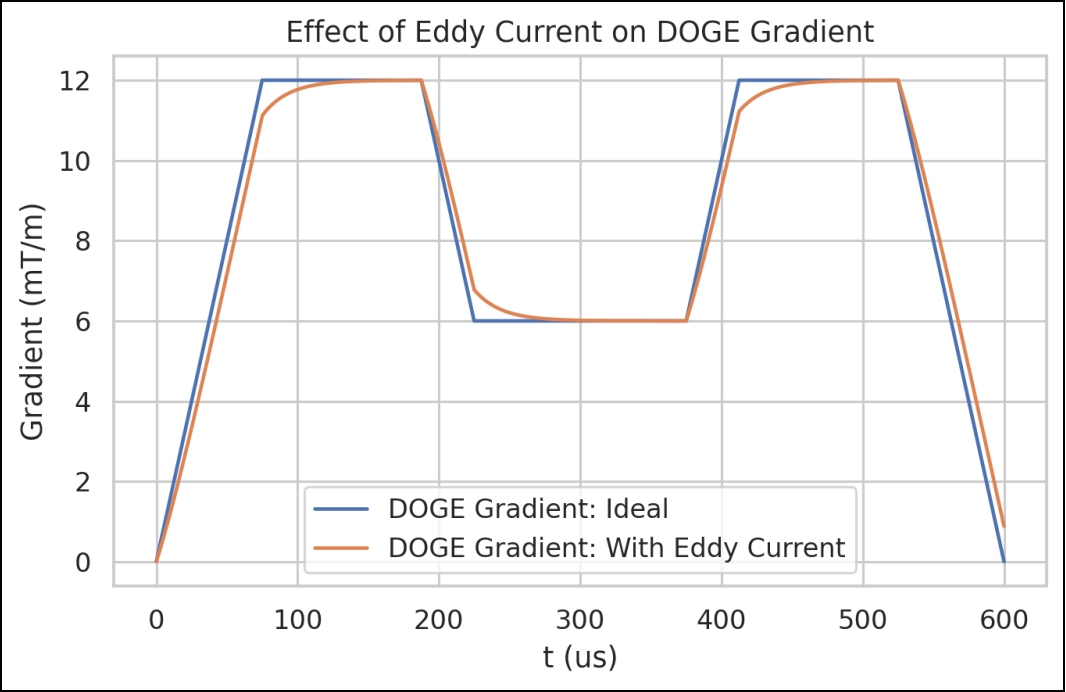
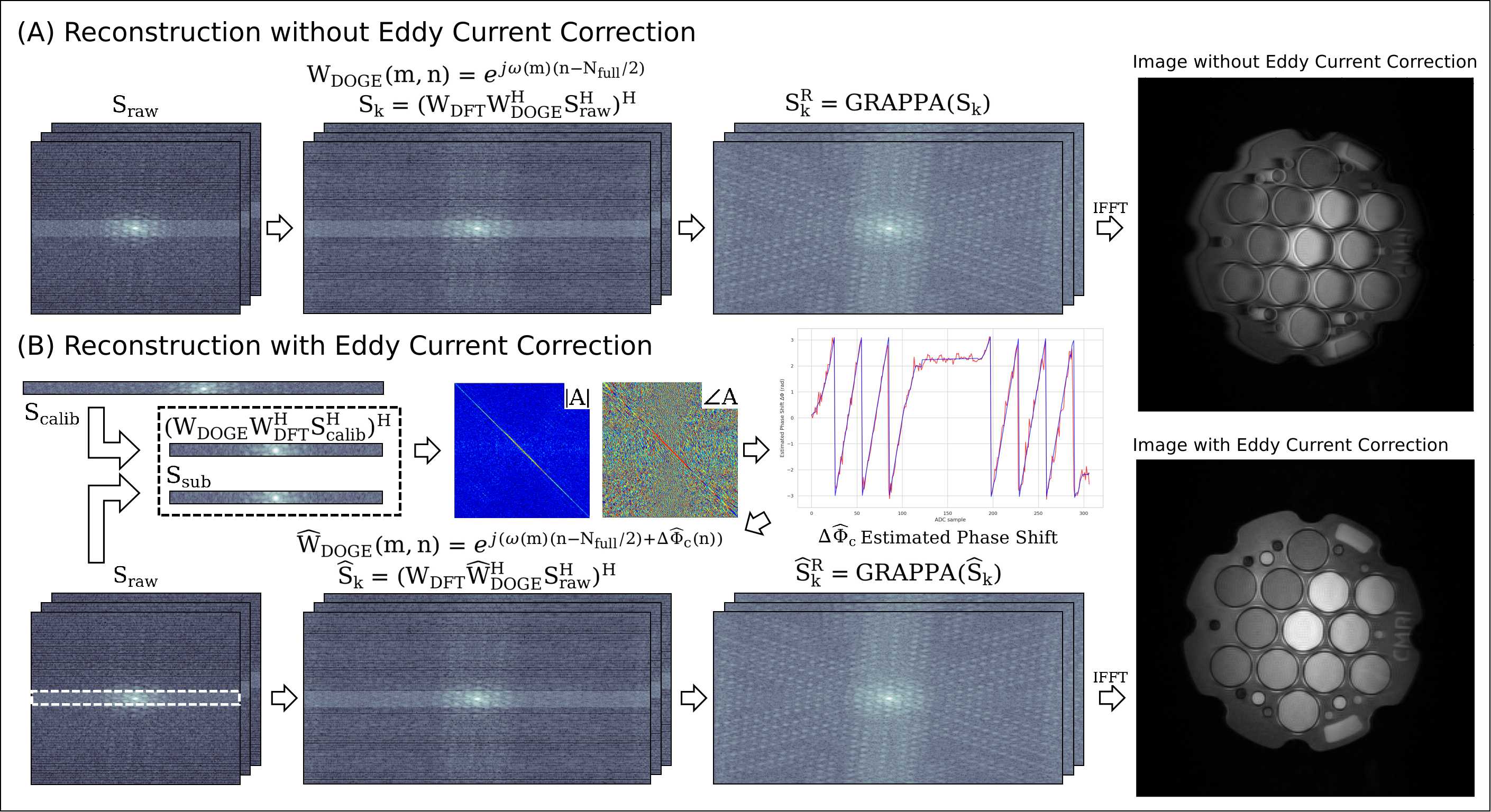
Fig. 2 and 3(a) highlight the significant eddy current artifact in DOGE readout in comparison to conventional methods. This is due to the DOGE waveform's ramp altering the transform basis $$$W_{DOGE}$$$, causing phase shift in K-space. To mitigate this, a phase correction process was applied to the FE direction subsampled data. The phase shift estimation is as follows:$$\begin{gathered} \min_{A} \bigg\|A\frac{S_{sub}}{|S_{sub}|_\circ}-\frac{W_{DOGE}W_{DFT}^HS_{calib}}{|W_{DOGE}W_{DFT}^HS_{calib}|_\circ}\bigg\|^2\\ \Delta\hat{\phi}_e=\angle \mathrm{diag}(A)\\\end{gathered}$$where notation $$$|\cdot|_\circ$$$ denotes element-wise absolute, $$$S_{calib}$$$ denotes the fully-sampled calibration lines gathered ahead of the DOGE readout, $$$S_{sub}$$$ denotes the subsampled lines of the same position, and $$$A$$$ is the phase correction matrix. The non-uniform transform matrix with eddy current correction is given by:$$\hat{W}_{DOGE}(m,n)=e^{j(\omega_x(m)\cdot (n-N_{full}/2)+\Delta\hat{\phi}_e(m))} \big|_{m=0,1,\cdots N_{sub}-1,\ n=0,1,\cdots N_{full}-1}$$The reconstruction process with eddy current correction demonstrated in Fig. 3(B) is given by:$$\hat{S}_{k} = (W_{DFT} \hat{W}{}_{DOGE}^H S_{raw}^H)^H$$where $$$\hat{S}_{k}$$$ is the eddy current corrected subsampled K-space data. GRAPPA reconstruction was applied to the subsampled K-space.
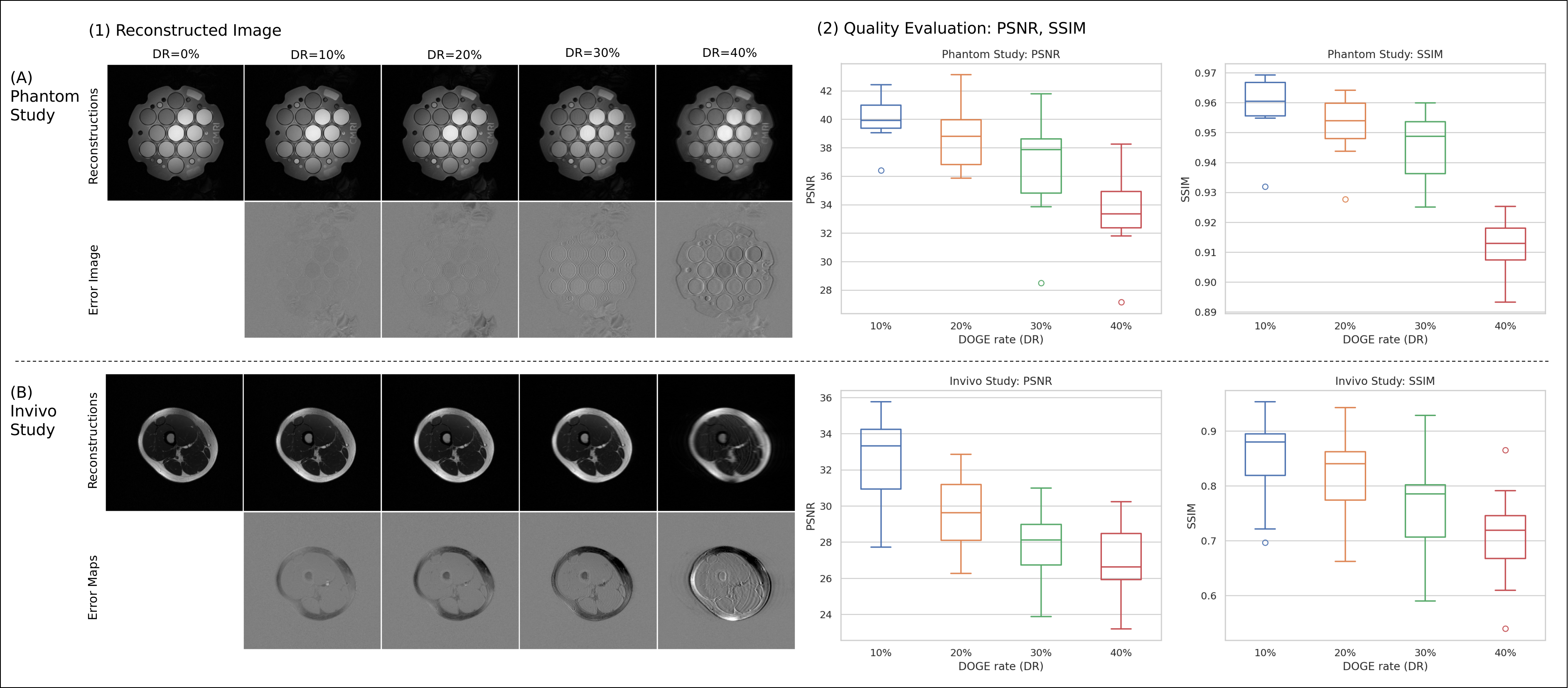
DOGE readout was implemented in the b-SSFP sequence. Data were gathered from phantom study and in vivo study using a 3T MRI scanner (uMR890, United Imaging Healthcare). The phantom study utilized a spherical calibration phantom, while the in vivo study data was collected from five healthy subjects on their thigh. The imaging parameters were set as follows: flip angle = $$$40^\circ$$$, FOV = $$$250\times250 \text{mm}^2$$$, matrix size = $$$256×256$$$, slice thickness = $$$7.0 \text{mm}$$$, bandwidth = $$$500 \text{Hz/pixel}$$$. The DOGE readout was examined with varying FE subsampling factors $$$DR$$$ from $$$0%$$$ to $$$40%$$$. Image quality was assessed using Peak Signal-to-Noise Ratio (PSNR) and Structural Similarity Index (SSIM) metrics.
Results
Fig. 4(1) displays the reconstructed images from both phantom and in vivo studies, with FE sampling factor $$$DR$$$ ranging from $$$0\%$$$ to $$$40\%$$$. Error maps, SSIM and PSNR (Fig. 4(2)) were calculated for quality assessment. Our results suggest that our approach offers image quality comparable to standard FE readouts when $$$DR<40\%$$$. For DOGE readout of $$$DR=40\%$$$, slight ringing artifacts were introduced, and the readout and TR duration were reduced by 40% and 20%, respectively.Discussion
This research presents the DOGE readout, a technique for improving MRI scan efficiency with FE subsampling. It can be integrated into different pulse sequences. Further investigation is required to fully evaluate the clinical utility of DOGE readout and its potential impact on MRI acceleration.Acknowledgements
No acknowledgement found.References
[1] Pruessmann, Klaas P., et al. "SENSE: sensitivity encoding for fast MRI." Magnetic Resonance in Medicine: An Official Journal of the International Society for Magnetic Resonance in Medicine 42.5 (1999): 952-962.
[2] Griswold, Mark A., et al. "Generalized autocalibrating partially parallel acquisitions (GRAPPA)." Magnetic Resonance in Medicine: An Official Journal of the International Society for Magnetic Resonance in Medicine 47.6 (2002): 1202-1210.
[3] Marvasti, Farokh, ed. Nonuniform sampling: theory and practice. Springer Science & Business Media, 2012.
Figures