3155
Retrospective Automatic Motion Detection in fMRI using k-space information1Electrical & Electronic Engineering, Yonsei University, Seoul, Korea, Republic of
Synopsis
Keywords: fMRI Acquisition, fMRI (task based), fMRI motion
Motivation: Handling subject motion in fMRI is an important issue. Thus, it's ideal to correct motion as thoroughly as possible during data preprocessing.
Goal(s): We aim to develop an algorithm that accurately detects precise motion corrupted measurements to efficiently correct motion.
Approach: Motion signal was obtained from the k-space data by calculating average squared difference between first measurement and successive measurements . Equation of threshold value to verify presence of motion was formulated. Lastly, the outliers in motion signal were detected using WLS(weighted least square) optimization framework.
Results: The proposed method successfully detects precise motion corrupted measurements automatically.
Impact: The proposed method can facilitate precise fMRI analysis by detecting motion corrupted measurements in advance to data preprocessing procedure and applying suitable corrections, which enables us to input less motion contaminated data from the early stages of fMRI data preprocessing.
Intoduction
During the acquisition of temporal-series in functional magnetic resonance imaging (fMRI) studies, handling subject motion is an important issue. Subject movement can affect voxel intensity and introduce motion artifacts unrelated to stimulus induced signal changes1,2. Consequently, detection and correction for subject motion is an essential process to observe the BOLD signals.The motion correction process, which is commonly used in typical fMRI data analysis tools such as SPM and FSL3, involves co-registering subsequent measurements to the reference measurement. However, employing the mean measurement as a reference in fMRI analysis may still have limitations, its value can be affected by motion artifacts. Therefore, it is still important to pre-identify and exclude volumes compromised by motion.
True motion parameters describing rigid-body motion, can be determined with registration technique. However, the registration process is computationally expensive and difficult to perform in real-time4. Therefore, our objective is to derive motion-sensitive parameters from k-space, which can serve as a replacement for true motion parameters.
Previous study in fMRI have explored the use of k-space domain in relation to motion4,5. However, formal study has only provided a threshold to determine the presence of motion-corrupted information, and it could not detect the precise motion corrupted measurements. Limited high frequency area of k-space were used4. To address the limitation, we aim to develop an algorithm designed to automatically detect specific measurements corrupted by motion by analyzing k-space data.
Methods
Six healthy volunteers were scanned on a 3T MRI system (MAGNETOM Vida, Siemens Healthineers) using 64ch-head coil. This study performed following tasks for each sequence; During the task-based fMRI experiment, the participant were instructed to induce motion at specified time points. 2D EPI sequences were used with following scan parameters; TR/TE=3000/30ms, flip angle=90˚, resolution=1.9mmx1.9mm, slice thickness=5mm, the number of slice=33, acceleration factor=2, NSA=1.To assess motion intensity, we set a threshold using framewise displacement (FD) from the realignment process in SPM12. With a strict threshold, the FD value should not exceed 0.36. Based on this, we formulated a tailored threshold for our algorithm as follows:
$$threshold = 4\times \sigma(\frac{d(input\, signal)}{dt}), \quad where\quad \sigma:\, standard\, deviation \quad [1]$$
To detect the motion corrupted measurement, we utilized k-space data instead of true motion parameters. Unlike previous study, whole regions of k-space was used to calculate a scalar value, (A(t)). Average squared difference value(A(t)) was calculated between the first measurement and successive measurement. Fig.1.
$$A(t)=\frac{\sum\limits_{k=-N/2}^{N/2}\sum\limits_{i,j=-M/2}^{-M/2}\lambda(i,j)(\left|k_{ijk}(t) \right|-\left|k_{ijk}(0) \right|)^2}{\sum\limits_{k=-N/2}^{N/2}\sum\limits_{i,j=-M/2}^{-M/2}\lambda(i,j)\left|k_{ijk}(0) \right|^2} \quad [2] $$
To detect outlier signals, we applied edge-preserving smoothing using weighted least squares (WLS) optimization. WLS operation assigns higher weights to data points near edges, helping to preserve fine details around the edges7.
Results
In Fig. 2, we observed that certain motion signals were detected only when both high and low frequency regions were utilized.In Fig. 3, we confirmed that when the maximum value of the first derivative of A(t) exceeds the threshold value obtained by equation [1], it indicats that the data had been corrupted by motion, highlighting the necessity of applying the proposed motion detection algorithm.
In Fig. 4, we applied the motion detection algorithm to the data and detect specific motion corrupted measurements, if the data exceeds the motion threshold. We successfully captured the motion at the time points corresponding to the motion onset as shown in Fig. 1.
In Fig. 5, we conducted the co-registration process without motion corrupted measurements, using both conventional and proposed method. When using the proposed method, more outliers of motion parameters were alleviated. Additionally, BOLD signal was decreased when data was co-registered using proposed method.
Discussion & Conclusion
In this study, we introduced fMRI motion detection algorithm that uses both high and low-frequency k-space domains for precise motion detection. By using framewise displacement (FD) as a reference criterion, we created a tailored threshold because we integrated all k-space regions, unlike previous study4.The potential applications for proposed algorithm are twofold. Firstly, excluding motion-corrupted measurements during co-registration and aligning only motion-free data can prevent contamination during mean measurement realignment and reduce computational load. In Fig.5, as we removed motion corrupted measurements, we observed a decrease in the intensity of the BOLD signal. Therefore, additional motion correction should be applied to restore the signal within those measurements. Therefore, secondly, by extracting and separately correcting motion-corrupted measurements in advance and then reintegrating them into the original dataset, we can alleviate motion during the early fMRI preprocessing stages.
In conclusion, the proposed algorithm is expected to verify the presence of motion and by accurately detecting the corrupted measurements, it can be utilized in the early stages of fMRI motion correction preprocessing.
Acknowledgements
No acknowledgement found.References
1. Friston, K. J., Ashburner, J., Frith, C. D., Poline, J. B., Heather, J. D., & Frackowiak, R. S. (1995). Spatial registration and normalization of images. Human brain mapping, 3(3), 165-189.
2. Lemieux, L., Salek-Haddadi, A., Lund, T. E., Laufs, H., & Carmichael, D. (2007). Modelling large motion events in fMRI studies of patients with epilepsy. Magnetic resonance imaging, 25(6), 894-901.
3. Oakes, T. R., Johnstone, T., Walsh, K. O., Greischar, L. L., Alexander, A. L., Fox, A. S., & Davidson, R. J. (2005). Comparison of fMRI motion correction software tools. Neuroimage, 28(3), 529-543.
4. Caparelli, E. C., Tomasi, D., Arnold, S., Chang, L., & Ernst, T. (2003). k-Space based summary motion detection for functional magnetic resonance imaging. Neuroimage, 20(2), 1411-1418.
5. Cui, L., Song, Y., Wang, Y., Wang, R., Wu, D., Xie, H., ... & Yang, G. (2023). Motion artifact reduction for magnetic resonance imaging with deep learning and k-space analysis. PloS one, 18(1), e0278668.
6. Siegel, J. S., Power, J. D., Dubis, J. W., Vogel, A. C., Church, J. A., Schlaggar, B. L., & Petersen, S. E. (2014). Statistical improvements in functional magnetic resonance imaging analyses produced by censoring high-motion data points. Human brain mapping, 35(5), 1981–1996. https://doi.org/10.1002/hbm.22307
7. Farbman, Z., Fattal, R., Lischinski, D., &
Szeliski, R. (2008). Edge-preserving decompositions for multi-scale tone and
detail manipulation. ACM transactions on graphics (TOG), 27(3), 1-10.
Figures
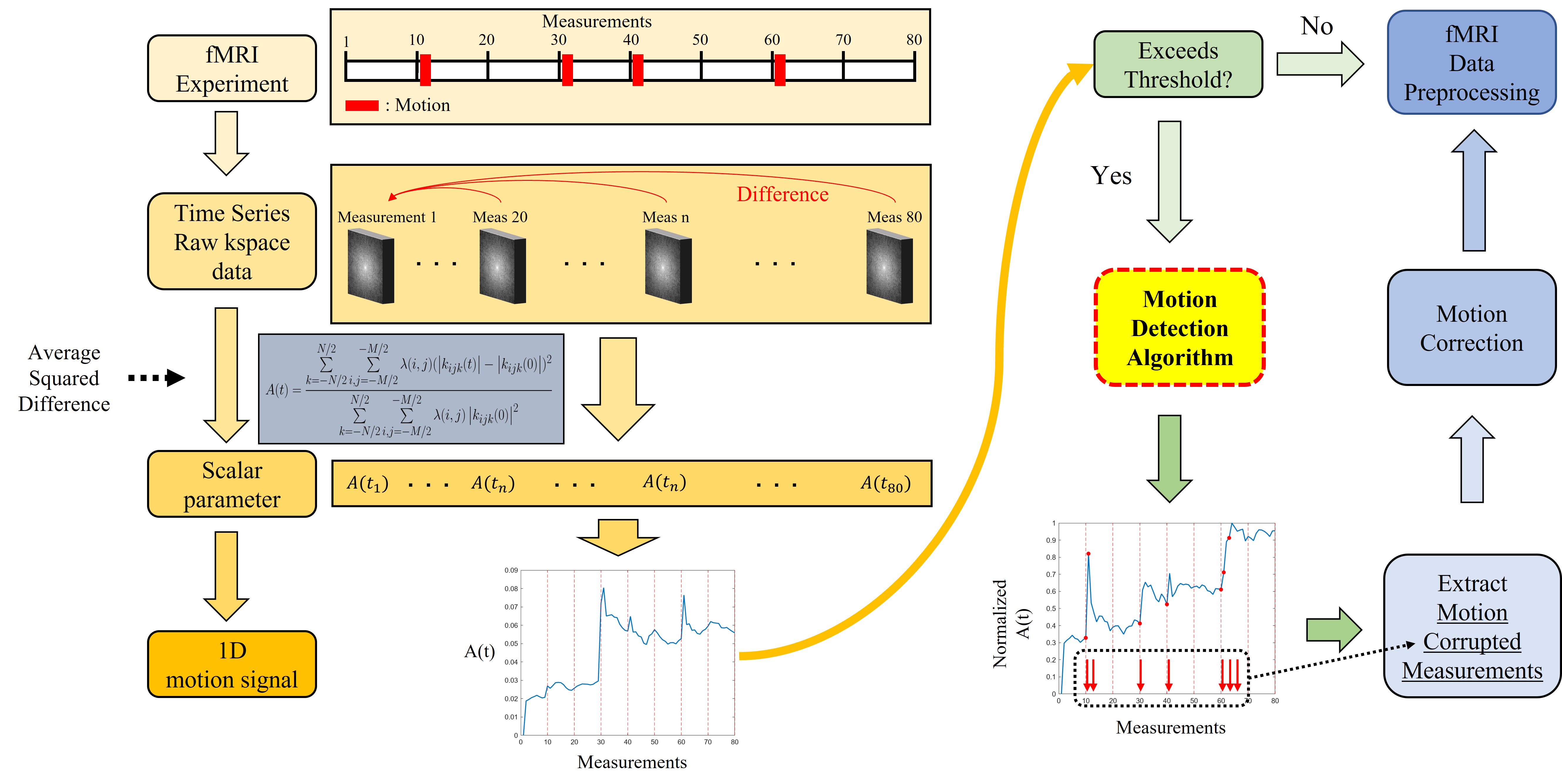
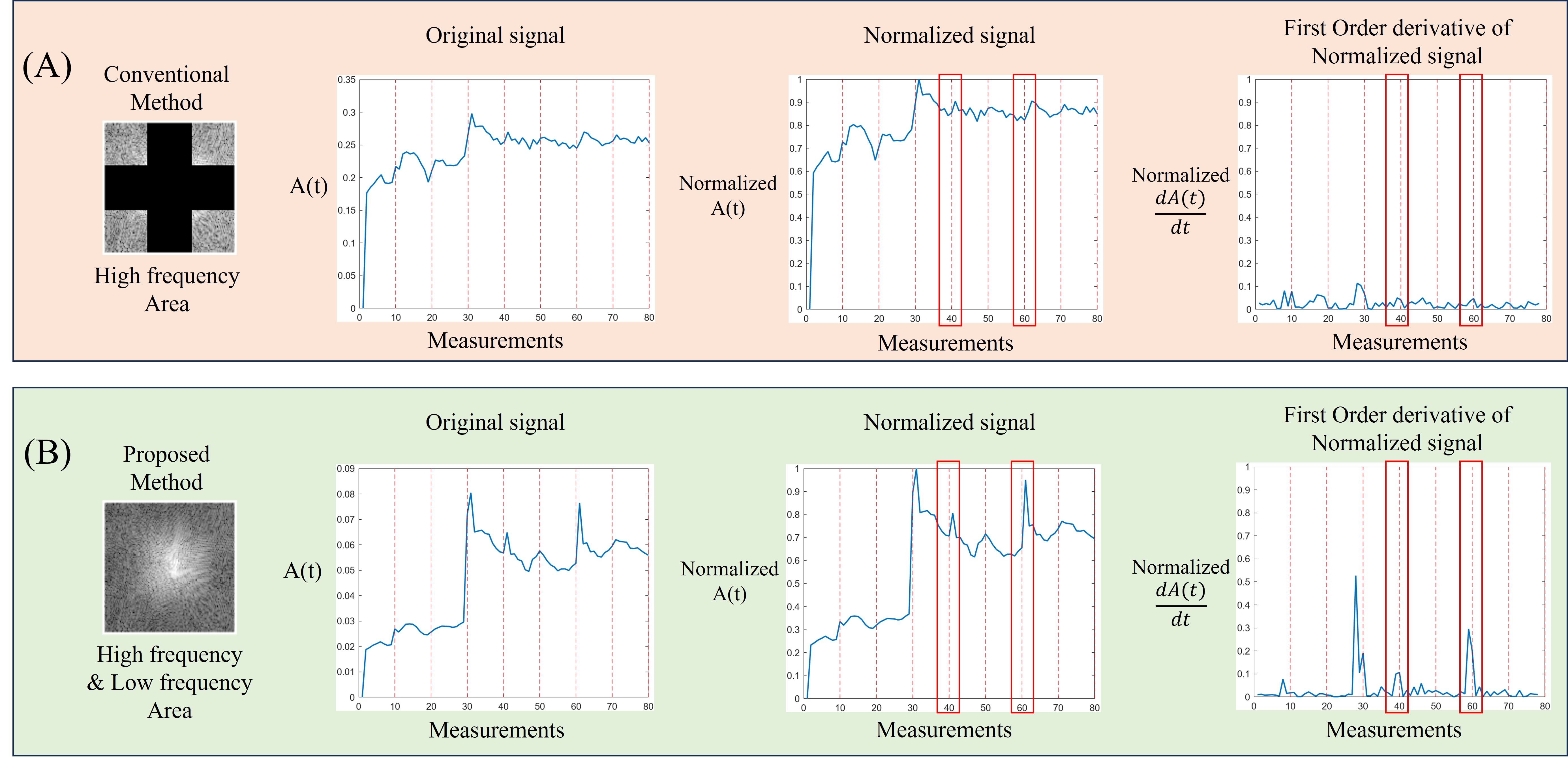
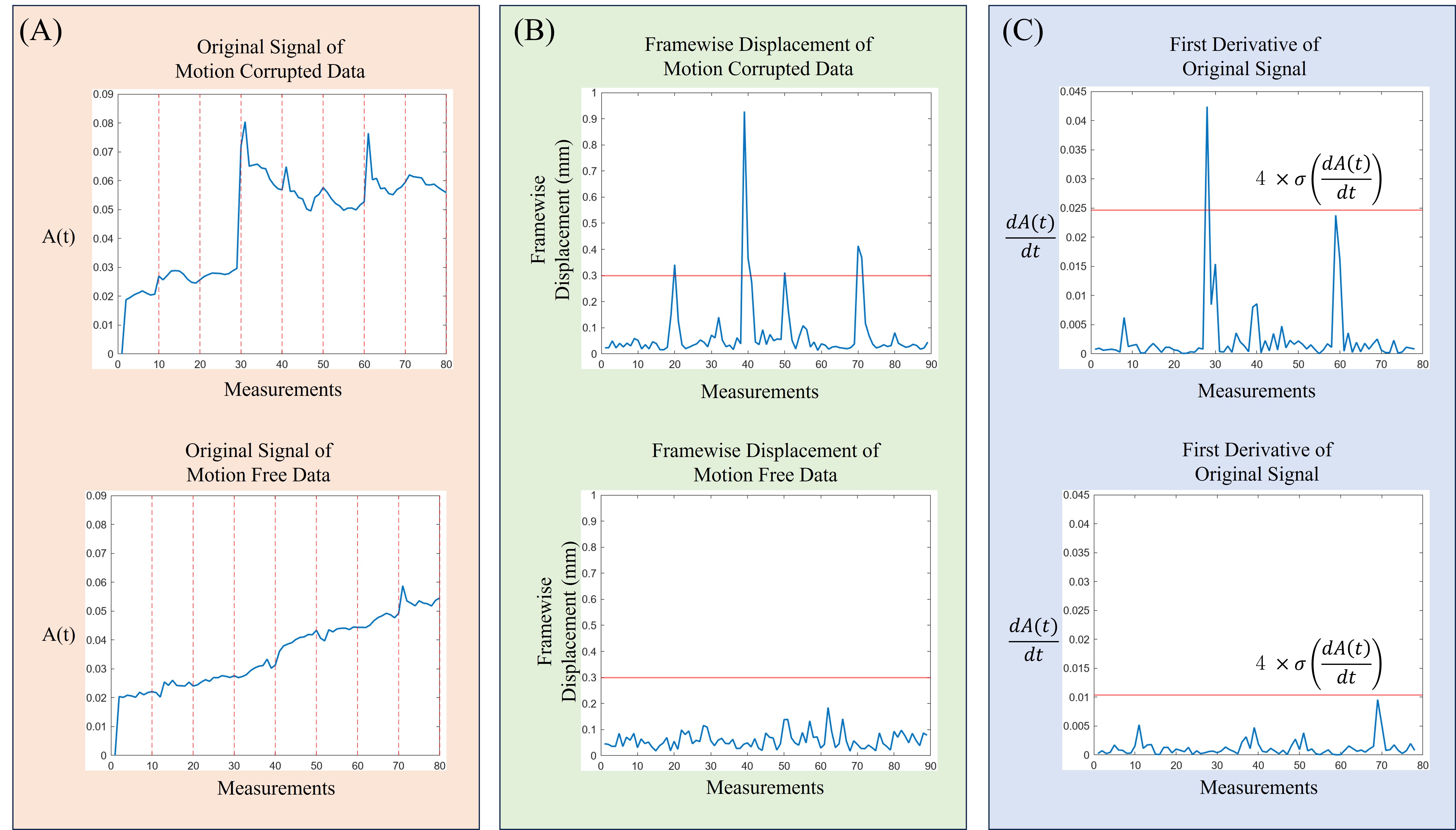
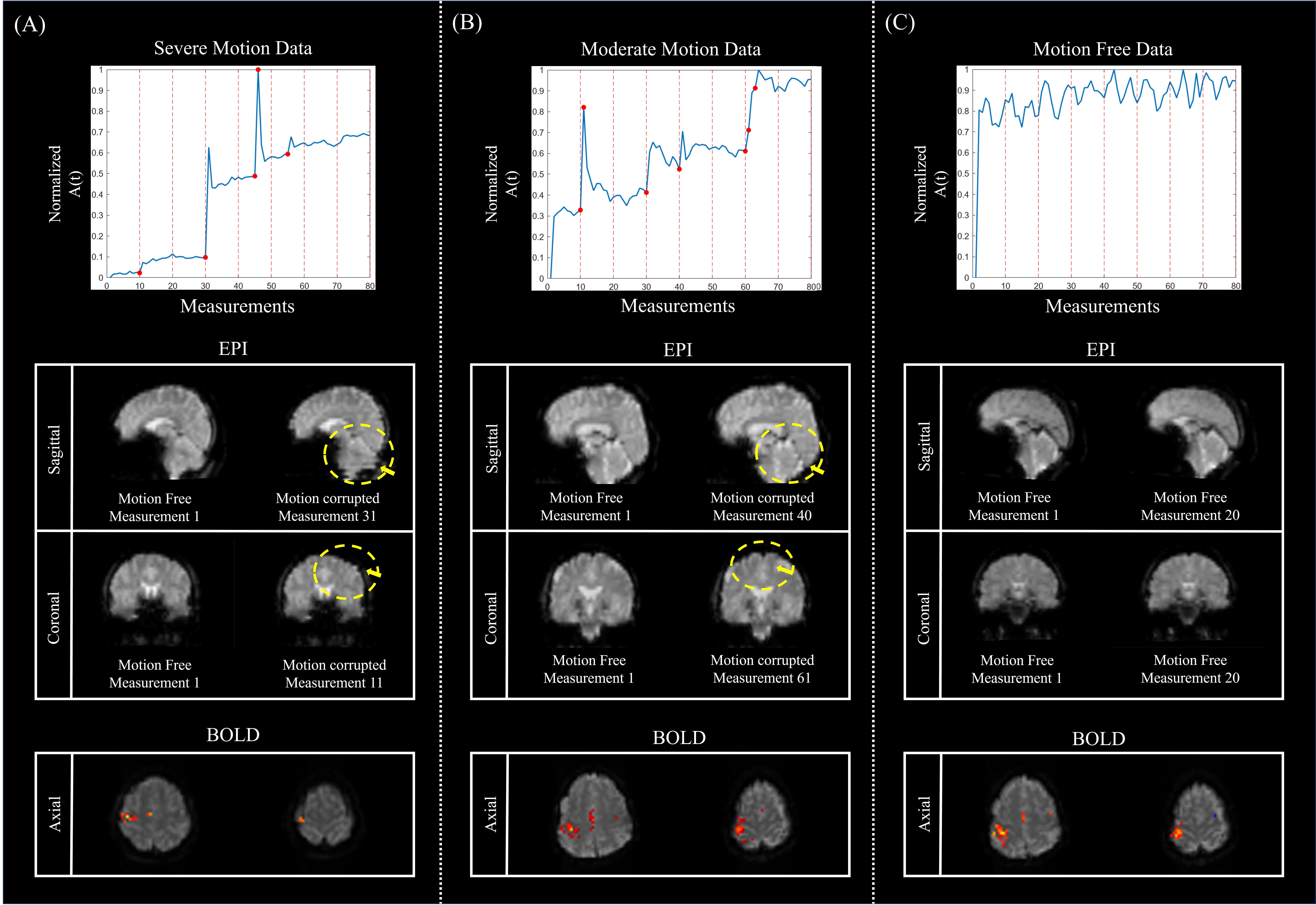
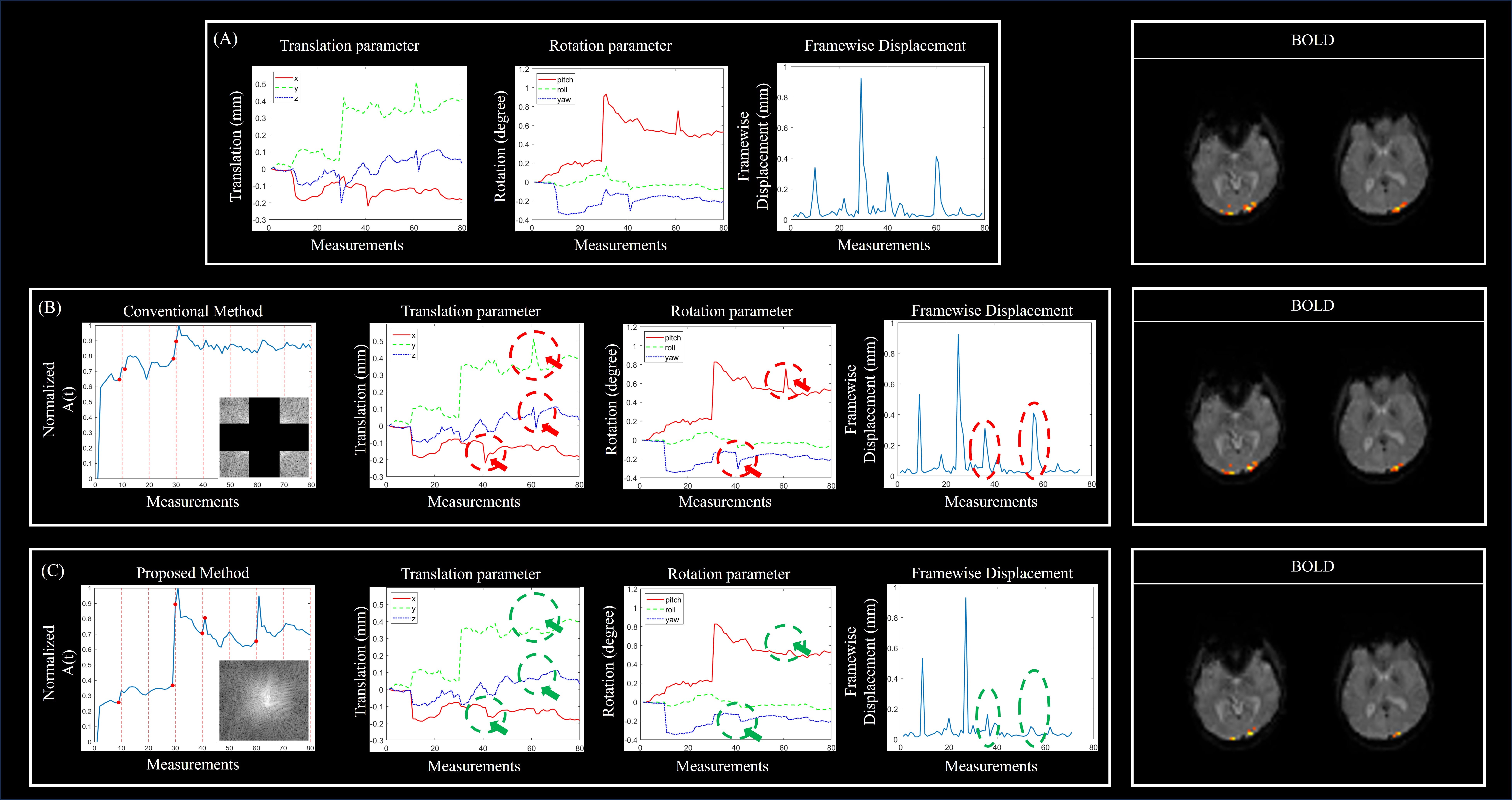
Figure5. The utilization of motion corrupted measurements detected by the proposed motion detection algorithm. (A) Co-registration was conducted using all measurements; (B),(C) Co-registration was conducted only using motion free data. Conventional method(B) and Proposed method(C) was implemented for motion detection method. The difference in alleviated outliers between (B) and (C) was indicated with arrows. BOLD signal decreased as more measurements were excluded, indicating the necessity for the correction of the excluded motion corrupted measurements.