3063
Spatially Constrained Estimation of Hyperpolarized 13C MRI Pharmacokinetic Rate Constant Maps using a U-Net1Radiology, University of California, San Francisco, San Francisco, CA, United States, 2UC Berkeley - UCSF Graduate Program in Bioengineering, Berkeley, CA, United States
Synopsis
Keywords: Hyperpolarized MR (Non-Gas), Simulations
Motivation: Current kPL fitting methods for Hyperpolarized [1-13C]Pyruvate MRI data are focused on voxel-wise models that do not consider spatial relationships. Incorporating spatial constraints may improve kPL accuracy for noisy data.
Goal(s): The goal of this study was to use a U-net to fit kPL, the pyruvate-to-lactate conversion rate, where the convolutional layers impose spatial constraints.
Approach: Simulated data of Hyperpolarized 13C-Pyruvate including perfusion and 13C-lactate conversion with random spatial augmentation and noise was used to train a U-net.
Results: The U-net kPL estimation showed advantage over voxel-wise methods in the low SNR regime and performance was heavily influenced by the training data.
Impact: Using a U-Net to estimate kPL maps for Hyperpolarized 13C-Pyruvate MRI data will aid the field in optimizing quantitative methods for future clinical use and serve as a proof-of-concept of using deep learning to estimate kinetic rates.
Introduction
The pharmacokinetic apparent rate constant between pyruvate and lactate, kPL, has shown to be an important clinical biomarker to quantify tumor aggressiveness1,2. Common methods to obtain kPL from dynamic Hyperpolarized [1-13C]Pyruvate (HP C13) MRI is to fit the dynamics of each voxel to a pharmacokinetic (PK) model3. One limitation of these methods is that they consider each voxel separately from the rest and do not account for any spatial relationships. These spatial relationships are an important opportunity to improve model fitting as HP C13 data can suffer from low SNR.Limited previous attempts have been made to fit kPL using spatial regularization during optimization of pharmacokinetic model fitting4. In this work, we propose the use of a convolutional neural network, specifically a U-net, to impose spatial regularization. A limitation of this methodology is the lack of available training data. Therefore, as a proof-of-concept, we propose the use of a simulated metabolic phantom data for training, validation, and test. The objective of this study is to train a U-net on the task of learning a kPL map from noisy simulated HP C13 data and compare the results to voxel-wise PK model fitting.
Methods
Noisy 2D dynamic data was simulated using a previously described metabolic phantom and 2-site PK model both available on the Hyperpolarized MRI Toolbox (Figure 1)3–5. Random spatial augmentations were added, like rotation (-45 to 45 degrees), zoom (0.7- 1.3), x/y translation (-10 to +10 voxels), and x/y reflection. The generated data had a random kTRANS (rate constant of pyruvate perfusion) gradient between 0.01-0.06 1/s, random kPL between 0.001-0.03 1/s, standard deviation of noise between 5e-5 and 5e-4. The dynamics were simulated with 30 timepoints, temporal resolution of 3s, pyruvate and lactate T1 of 25s and a gamma-variate input function. A thousand 2D datasets were generated and split 800/100/100 for training/validation/test. Test examples with higher noise (noise std = 1e-3), lower noise (noise std = 5e-6), higher kPL range (0.05-0.07 1/s) and lower kPL range (0.001- 0.003 1/s) were also generated to test the model performance on data outside of the training range.A 2D U-net was trained for 249 epochs until convergence with Adam optimizer (learning rate 1e-3)6,7. The dynamic data with pyruvate and lactate concatenated in the channel dimension (64x64x60) was the input into the model and the estimated kPL map (64x64) was the output (Figure 2). L1 loss, summed across the image, was used for training.
As comparisons to the U-net outputs, a 1-compartment two-site PK model3 was used to fit kPL per voxel to the simulated data (“Voxelwise PK Model”). Additionally, the data was denoised using HOSVD denoising8 and then fit with the voxel-wise PK model (“Voxelwise PK Model + HOSVD Denoising”).
Results
The test results showed strong correspondence with the ground truth kPL with the highest error on the edges of the circular phantoms (Figure 3).The U-net estimated kPL maps showed better but comparable performance to the “Voxelwise PK Model + HOSVD Denoising” results whereas the “Voxelwise PK Model” kPL maps were much noisier and demonstrated higher error due to this noise (Figure 4).
In the low SNR (high noise) cases, the U-net performed best but in the high SNR (low noise) case the voxel-wise methods performed better. The U-net model performed poorly when the test cases included kPL values outside of the range of the training data (Figure 5).
Discussion
The U-Net model shows advantage over the voxel-wise methods in the low SNR regime, likely because the model has learned typical spatial patterns and exploits these to effectively perform denoising.A big limitation of this study was the use of simulated data. The model showed limitations in generalizing to test cases outside of the range of training data. For this model to be applicable to in vivo data, we believe a combination of in vivo HP C13 data along with more realistic simulated data should be used for training.
Conclusion
This work serves as a proof-of-concept of using a convolutional neural network to estimate kPL maps and the advantages provided by convolutional layers that exploit spatial patterns with noisy data. Currently, this work has limitations for application to in vivo data but in the future could be addressed with improved simulations and in vivo HP C13 data using methods such as fine-tuning and unsupervised learning. PK models also serve an important role for metabolic imaging as they model the in vivo biochemistry and, in the future, it may be important to investigate the interaction of convolutional neural networks with the PK models for kPL fitting.Acknowledgements
This work was supported by NIH Grants: P41EB013598, R21DK130002, R01CA249909, American Cancer Society Grant RSG-18-005-01-CCE and UCSF Discovery Fellowship.References
1. Tang, S. et al. Metabolic imaging with hyperpolarized 13C pyruvate magnetic resonance imaging in patients with renal tumors—Initial experience. Cancer 127, 2693–2704 (2021).
2. Keshari, K. R. et al. Hyperpolarized 13C-pyruvate magnetic resonance reveals rapid lactate export in metastatic renal cell carcinomas. Cancer Res. 73, 529–538 (2013).
3. Larson, P. E. Z. et al. Investigation of analysis methods for hyperpolarized 13C-pyruvate metabolic MRI in prostate cancer patients. NMR Biomed. 31, 1–17 (2018).
4. Maidens, J. et al. Spatio-Temporally Constrained Reconstruction for Hyperpolarized Carbon-13 MRI Using Kinetic Models. IEEE Trans. Med. Imaging 37, 2603–2612 (2018).
5. Hyperpolarized-MRI-Toolbox. Available at https://github.com/LarsonLab/hyperpolarized-mri-toolbox doi:10.5281/zenodo.1198915.
6. Ronneberger, O., Fischer, P. & Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. ArXiv150504597 Cs (2015).
7. Falk, T. et al. U-Net: deep learning for cell counting, detection, and morphometry. Nat. Methods 16, 67–70 (2019).
8. Kim, Y. et al. Denoising of hyperpolarized 13 C MR images of the human brain using patch-based higher-order singular value decomposition. Magn. Reson. Med. 86, 2497–2511 (2021).
Figures
Example predicted kPL maps from the test dataset. From top to bottom the examples had added noise standard deviations of 8.03e-5, 1.51e-4 and 2.5e-4. The results show high correspondence between the ground truth and predicted kPL maps. Errors were localized in the boundaries of the circular objects and in the top-left corner.
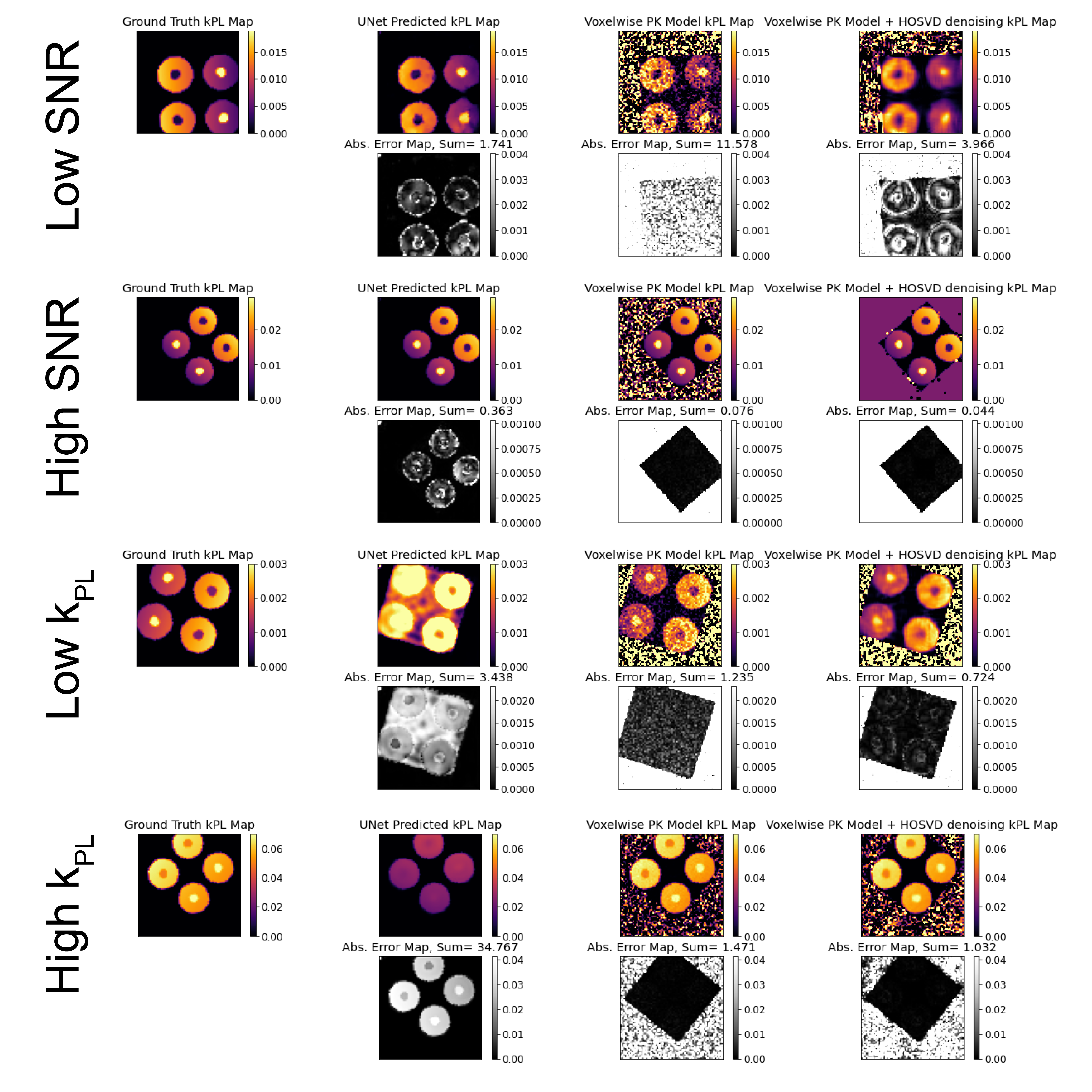
The U-net model shows the best performance in low SNR cases. However, it fails to generalize, showing errors for kPL ranges outside of what was used in the training data.