2826
A Low-Cost, Handheld, and Real-Time 2D MR Imager1Electrical Engineering and Computer Science, Massachusetts Institute of Technology, Cambridge, MA, United States, 2Institute for Medical Engineering and Science, Massachusetts Institute of Technology, Cambridge, MA, United States
Synopsis
Keywords: Low-Field MRI, Low-Field MRI
Motivation: To enable 2D phantom imaging using low-cost, handheld MRI for point-of-care and educational applications.
Goal(s): Optimize a handheld spokes-and-hub magnet for 2D imaging, focusing on cost-effective design to create a comprehensive imaging system with affordability, accessibility, and versatility.
Approach: This research extends prior studies focusing on a handheld spokes-and-hub magnet. Spin echo and turbo spin echo phantom imaging is enabled through optimization of magnet's design, RF pulses, and digitally-controlled H-bridge gradient coil drive.
Results: 64x64 pixel MR images obtained in seconds from 10 mm diameter phantoms using a duration-phase-encoded TSE sequence on our redesigned handheld imager (spokes-and-hub magnet, dithered-pulse RF, switch-driven gradients).
Impact: From magnet design and budget-friendly hardware constraints, we delve into 2D image acquisition in handheld spokes-and-hub MRI. Our tools aid iterative design, demonstrating viability for education and potential clinical use. Advancing low-field MRI, this work boosts MR accessibility and affordability.
Introduction
Permanent magnet arrays present as a low-cost and portable alternative for point-of-care and educational MR applications, despite a trade-off in image quality [1, 2, 3, 4]. This abstract showcases spin echo (SE) and turbo spin echo (TSE) phantom imaging results from a handheld spokes-and-hub magnet, building upon prior abstracts detailing the magnet topology’s development and optimization of dithered RF pulses using an inexpensive microcontroller [5, 6]. These earlier works, combined with unconventional gradient encoding field and pulse sequence designs specific to the spokes-and-hub magnet, enable real-time 2D imaging of phantoms in a matter of seconds. Our approach leverages the same microcontroller for precise timing control of low-cost digitally-controlled H-bridge drivers for gradient encoding, serving as a cost-effective substitute for expensive analog power amplifiers. Finally, these contributions are summarized into a framework for comprehensive imaging system design, allowing for future iteration, scaling, and advancement of handheld magnet design.Methods
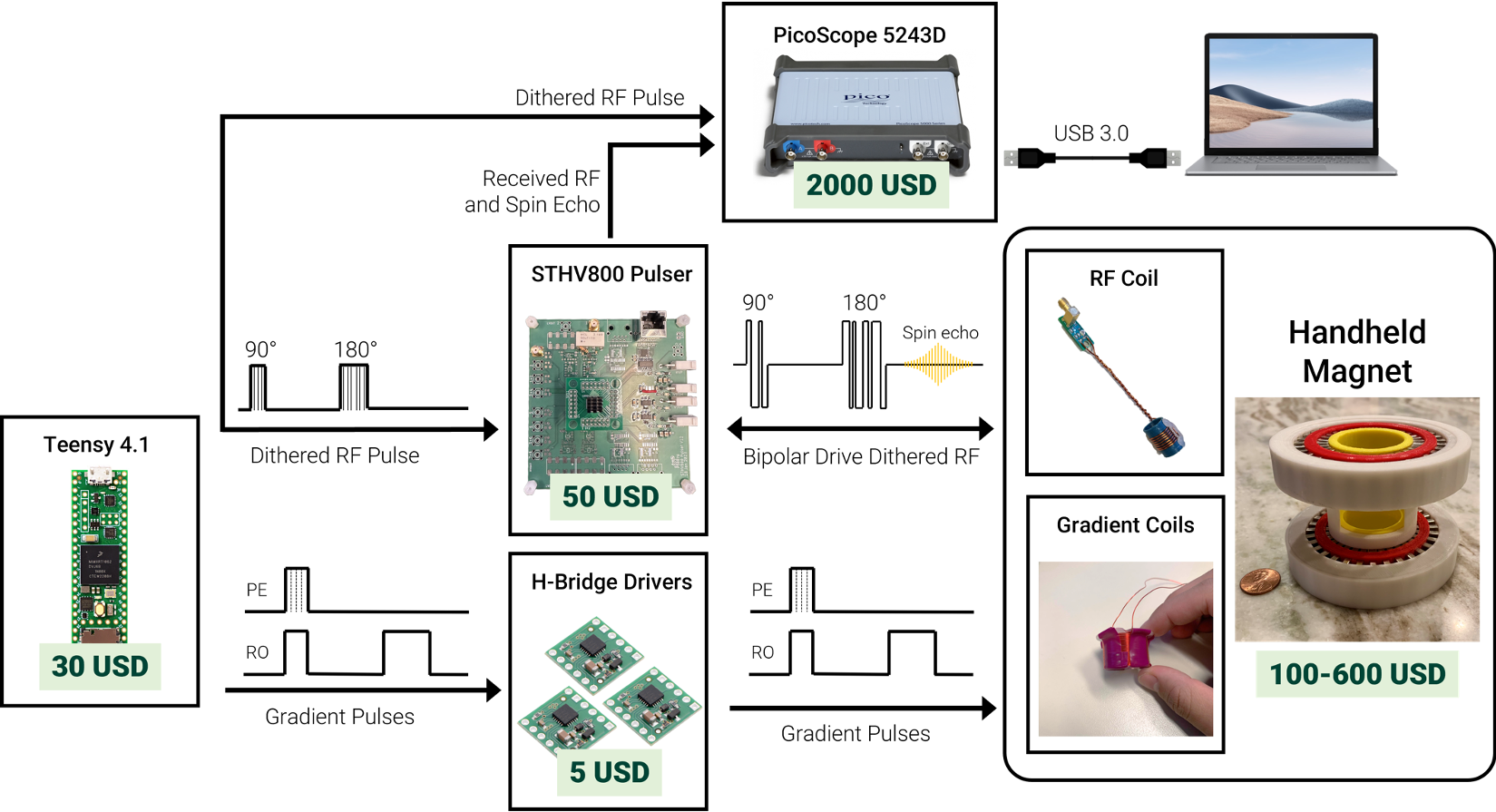
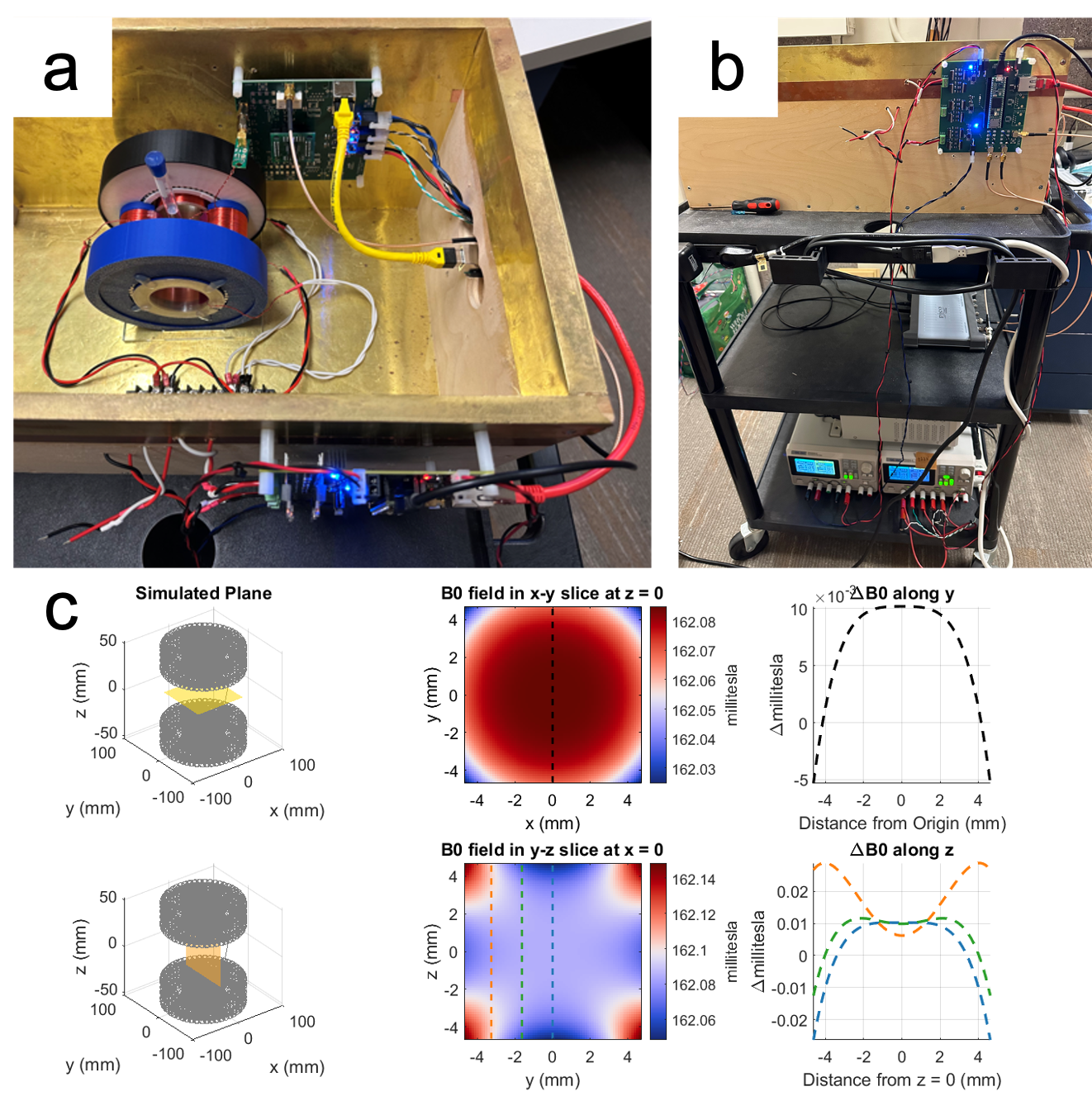
Permanent magnet arrays for handheld MRI offer a substantial cost reduction within the context of the 𝐵0 portion of the MRI system. By capitalizing on the lower Larmor frequency range characteristic of permanent magnet MRI, specific design considerations can reduce expenses in the RF and sequence programming subsystems. The hardware selections for this spokes-and-hub handheld MRI system are diagrammed in Fig. 1 and can be observed in the physical setup illustrated in Fig. 2(a),(b).The magnet (600 USD) has an inner diameter opening of 66 mm each ring consists of 150 bar magnets (25.4 x 3.175 x 12.7 mm). The permanent magnet’s simulated field pattern is shown in Fig. 2(c) where the B0 field is 162 mT, or Larmor frequency of 6.9 MHz). The magnet has field uniformity of 200 ppm across an 8 x 8 x mm FOV, significantly improving upon the 1500 ppm homogeneity of prior spokes-and-hub magnets [5].
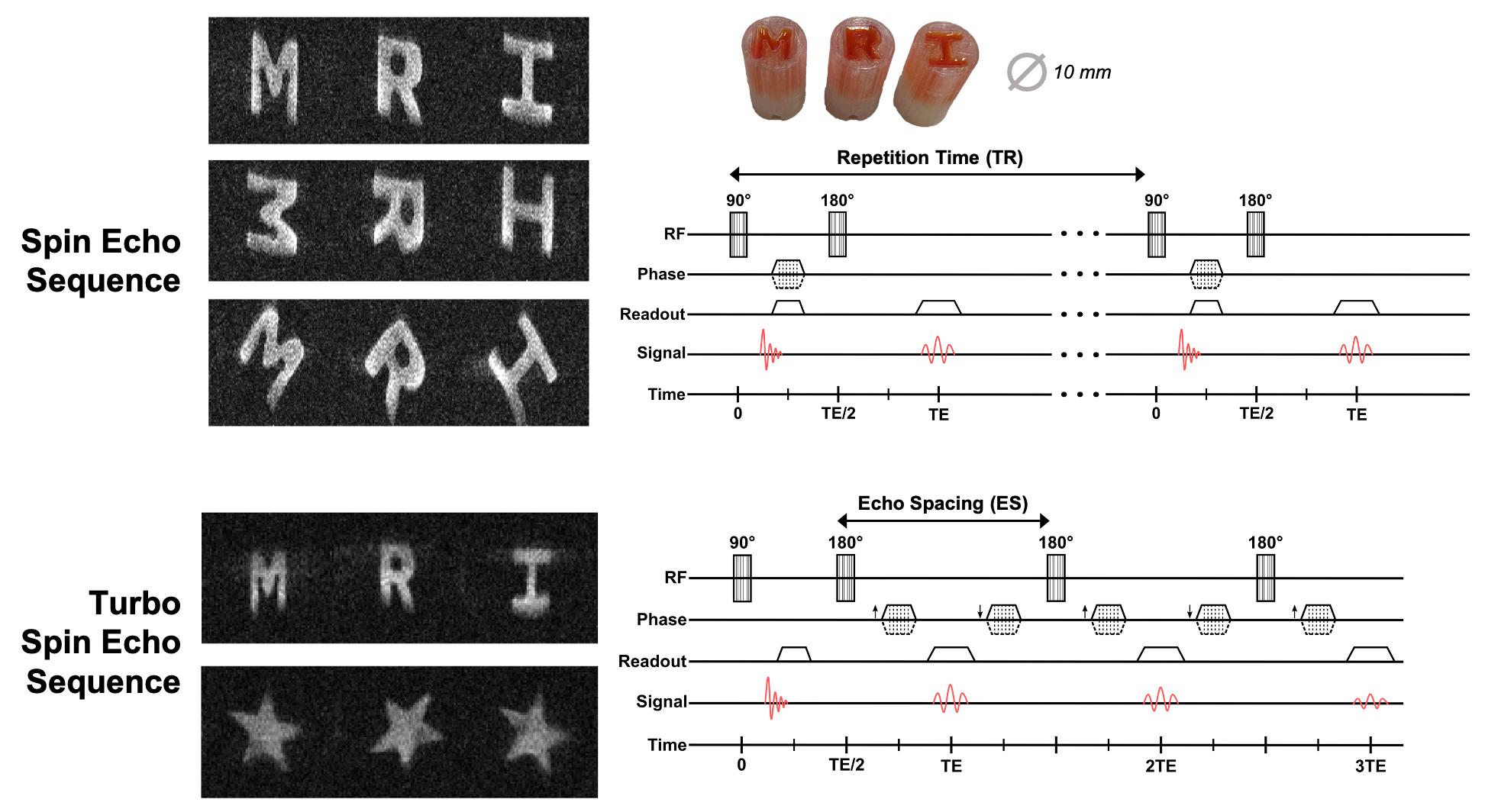
A microcontroller (Teensy 4.1) and ultrasound pulser IC (STHV800) with digitally-controlled dithered pulse sequences were used to serve as a cost-effective RF solution [6]. The precise timing control capability of the Teensy 4.1 was also used to for gradient control to digitally drive commercial H-bridge drivers (DRV8231A) with relatively low currents (<3A) for hand-wound coils (20.8 mT/m/A in X-direction, 30.3 mT/m/A in Z-direction). This selection of H-bridge hardware eliminates the need for expensive analog power amplifiers but necessitates a unique approach for driving the gradient time-gated switches. Rather than incrementing the amplitude of the phase encoding gradient in increasing steps, an incremental increase in pulse duration was employed as displayed in the sequence diagrams in Fig. 4. Fourier spatial encoding was used in the X (phase-encode) and Z (frequency-encode) directions.
Results
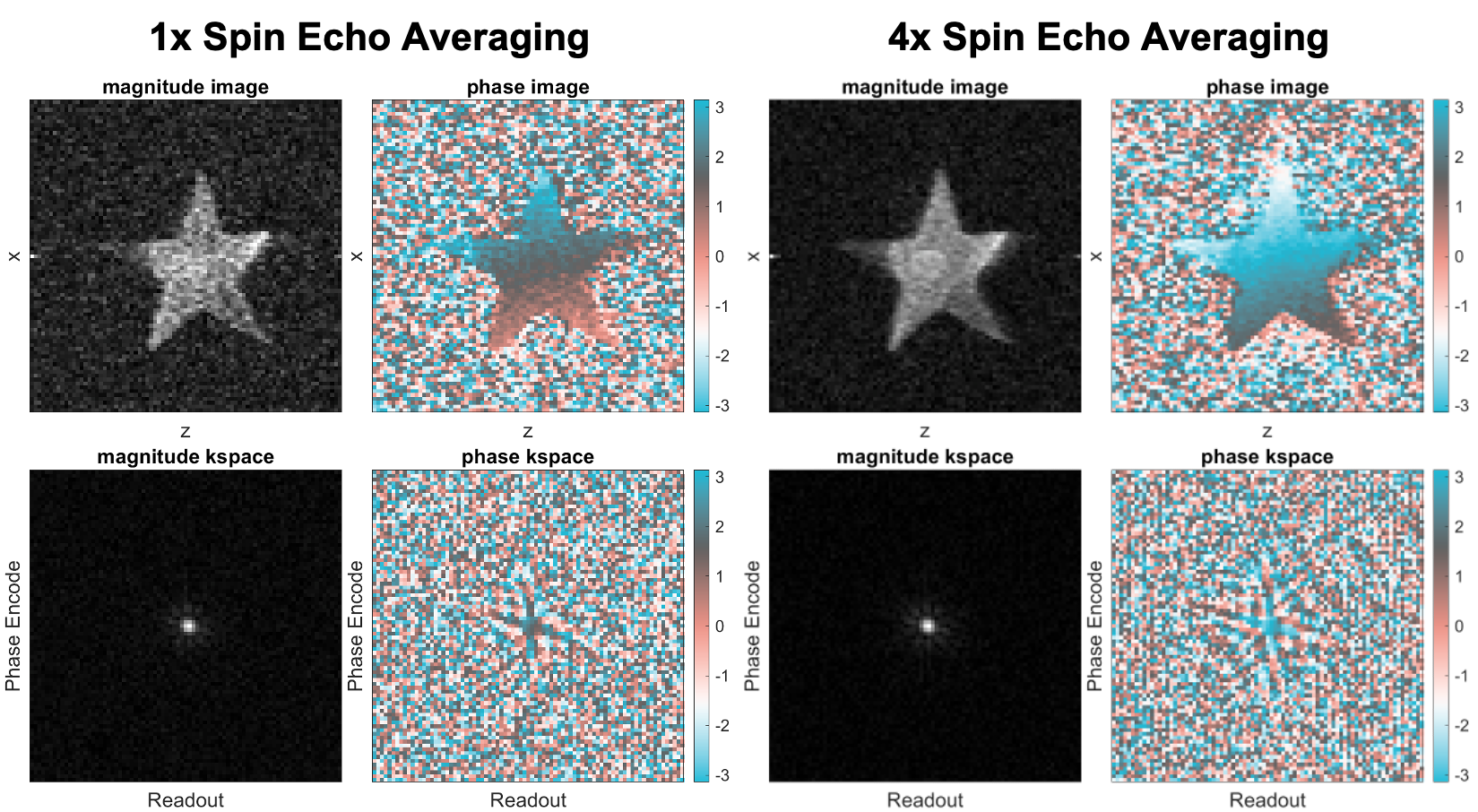
Figure 3 presents reconstructed spin echo images for a star-shaped phantom in M4, both in the absence of averaging and with 4 averages for each line of k-space. There is discernible improvement in SNR and also phase uniformity across the sample when including averaging. All phantoms are made from 3D printed PLA and filled with water. The spin echo image without averaging took 3 minutes to acquire, and for 4 averages, the imaging time was 12 minutes.The imaging results of Fig. 4 encapsulates an array of diverse phantoms, each imaged with varying FOV and TEs. The 64x64 pixel TSE images showcase the benefits of the sequence in terms of accelerated image acquisition time (from minutes to seconds). As expected, the TSE images have relatively lower SNR due to the influence of T2 decay stemming from the long echo train. However, the images still retain fundamental spatial information from the phantoms and hold tremendous promise for point-of-care and educational imaging.
Discussion
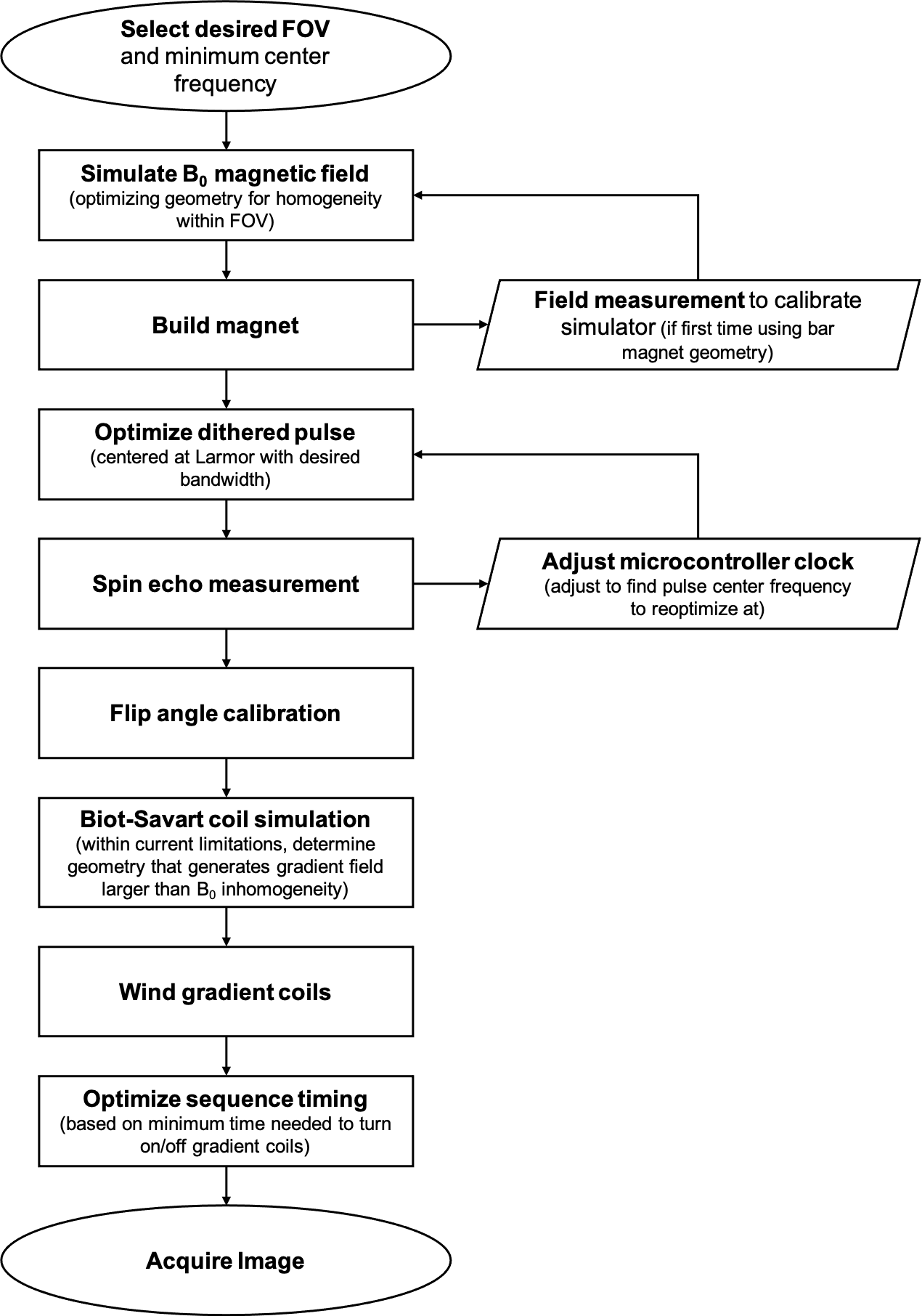
Figure 5 presents a flow chart describing the process of designing and building handheld magnets, starting from initial selection of the desired imaging FOV, culminating in acquiring actual images. This iterative procedure within the imaging system design domain flexibly accommodates adjustments as necessitated by insights obtained from both simulation outcomes and experiment measurements. Using this procedure, we optimized magnet and RF pulse designs from previous work and further designed gradient coils to allow for 2D phantom imaging.Conclusion
This work explores the computational design, implementation, and optimization of a handheld MRI system using low-cost components and innovative techniques. With the ability to obtain a fully sampled k-space in 5 seconds, the real-time TSE imaging capability of the handheld spokes-and-hub magnet underscores significant strides made in development of a handheld MRI system. This opens the door for a myriad of potential avenues for future exploration, in both educational and point-of-care diagnostic settings.Acknowledgements
Funding support from NIH NIBIB R01EB018976, MIT-MGH seed grant, DoD NDSEG Fellowship, and MIT EECS department.References
- Wald LL, McDaniel PC, Witzel T, Stockmann JP, Cooley CZ. Low-cost and portable MRI. J. Mag. Reson. Med., 52(3):686-696, 2019.
- Webb A, Obungoloch J. Five steps to make MRI scanners more affordable to the world. Nature, 615(7952):391-393, 2023.
- Marques JP, Simonis FF, Webb AG. Low-field MRI: An MR physics perspective. J. Mag. Reson. Med., 49(6):1528-1542, 2019.
- Huang SY, Ren ZH, Obruchkov S, Gong J, Dykstra R, Yu W. Portable Low-Cost MRI System Based on Permanent Magnets/Magnet Arrays. Investig. Magn. Reson. Imaging 23:179-201, 2019.
- Kuang I, Arango N, Stockmann J, Adalsteinsson E, White J. Equivalent-Charge-Based Optimization of Spokes-and-Hub Magnets for Hand-Held and Classroom MR Imaging. Proc. Intl. Soc. Mag. Reson. Med. 27., 2019.
- Kuang I, Arango N, Stockmann J, Adalsteinsson E, White J. Bloch-Optimized Dithered-Ultrasound-Pulse RF for Low-Field Inhomogeneous-Permanent-Magnet MR Imagers. Proc. Intl. Soc. Mag. Reson. Med. 28., 2020.
Figures