2824
Integrating Deep Learning for Detection and Correction of Motion Artifacts in multi-echo GRE MRI1Department of Electrical and Electronic Engineering, Yonsei University, Seoul, Korea, Republic of, 2Department of Artificial Intelligence, Sejong University, Seoul, Korea, Republic of
Synopsis
Keywords: Artifacts, Motion Correction
Motivation: Motion artifacts in mGRE MRI scans reduce image quality, increasing the risk of misdiagnosis and often necessitating repeat scans, negatively impacting patient care and diagnostic accuracy.
Goal(s): Our goal is to develop a novel deep learning-based framework for reducing motion artifacts in mGRE MRI k-space data, ensuring the generation of high-quality images.
Approach: The methodology proceeds by detecting and correcting motion-corrupted phase encoding lines within the k-space domain, employing a two-stage DeepFillv2 algorithm. It also integrates motion parameter estimation to enhance the framework's robustness.
Results: The model’s effectiveness in identifying and rectifying motion artifacts in MRI was confirmed through quantitative and qualitative evaluation.
Impact: The proposed k-space domain framework progresses by identifying phase encoding lines affected by motion and repairing them using deep learning techniques, thereby proving improved image quality and demonstrating potential as a diagnostic aid.
Introduction
Multi-echo gradient echo (mGRE) is a sophisticated MRI technique that acquires multiple echoes at different times following a single radiofrequency pulse. Its utilization of short repetition time (TR), often just tens of milliseconds, provides high temporal resolution that captures rapid and continuous patient motion during data acquisition. Such motion can introduce artifacts that degrade image clarity and raise the risk of misdiagnosis, often necessitating additional scans. To address this, we propose a deep learning-based framework that identifies and corrects motion-corrupted lines in MRI k-space data while simultaneously estimating motion parameters, aiming to enhance image quality and diagnostic reliability.Methods
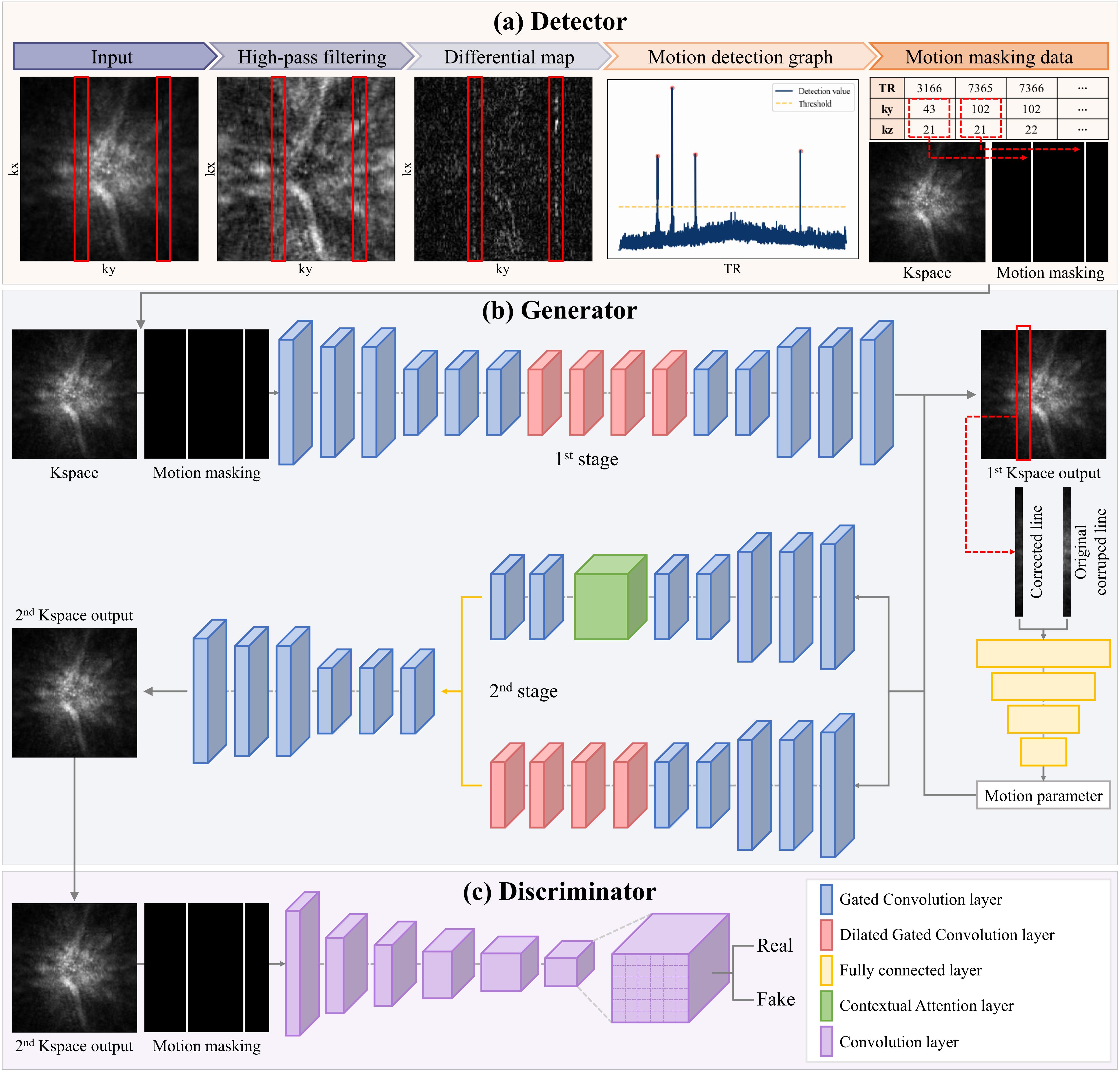
[Data acquisition] 3D mGRE brain MRI scans were acquired using a 3.0T scanner (Magnetom Tim Trio, Siemens Medical Solutions, Germany). A total of 10 subjects’ scan data were collected with the following parameters: matrix size of 128x128x72; TR of 60 msec; first echo time (TE) of 2.28 msec. Due to the difficulty in acquiring both motion-free and motion-distorted data pairs, motion simulator1 with 3D rigid rotation motion was employed to generate the data distorted from motion-clean data.[Proposed Network] The proposed framework comprises two steps: firstly, identifying the positions of distorted phase encoding lines by motion, and secondly, correcting the affected lines (Figure 1).
The first step follows the methodology outlined in Choi et al., 20222. Due to the spatial frequency characteristics of a very large central value, analyzing signals in the surrounding regions proved challenging. Thus, a high-pass filter was applied as follows:
$$$f(i_{kx},j_{ky}, k_{kz})=1-\sin(\frac{i}{number\,of\,kx}\pi)\sin(\frac{j}{number\,of\,ky}\pi)\sin(\frac{k}{number\,of\,kz}\pi)$$$
The discontinuous ky spacing facilitates motion detection observation, accordingly, k-space data along the ky-kx axis were analyzed. To remove the sparsity in the high-pass filtered k-space data, singular value decomposition was applied, followed by differentiation along the ky direction, resulting in a differential map. The summation of this map along the kx direction yielded a ky-axis graph, which was subsequently normalized by dividing the sums by the average of non-local maxima. The resulting graph highlights regions susceptible to motion with elevated detection values (Figure 1.a). To identify these motion-affected locations, a threshold value was determined using equation (2). Values exceeding this threshold indicated motion-affected regions, leading to the creation of corresponding masking data.
$$$Threshold\,value=(Average\,of\,detection\,values)+4\times(Standard\,deviation\,of\,detection\,values)$$$
In the second step, the DeepFillv2-based model3 corrects the lines previously masked due to motion artifacts, utilizing both the motion masks and k-space data prepared in the first step. The first stage yields an initial estimation for the masking, while the second stage further refines it by incorporating detailed textures for a seamless blend with the existing content. Additionally, the corrected lines in the first stage and the original corrupted lines serve as inputs for a supplementary model, consisting of four fully connected layers, to estimate motion parameters. The estimated motion parameters from this additional model feeds into the second stage alongside the first stage's output (Figure 1.b). A discriminator then differentiates between the original (real) and synthesized (fake) k-space data (Figure 1.c). The model was trained using simulated datasets.
Ultimately, the proposed network detects motion-affected regions within the k-space data, corrects these areas, and simultaneously estimates the motion-related parameters.
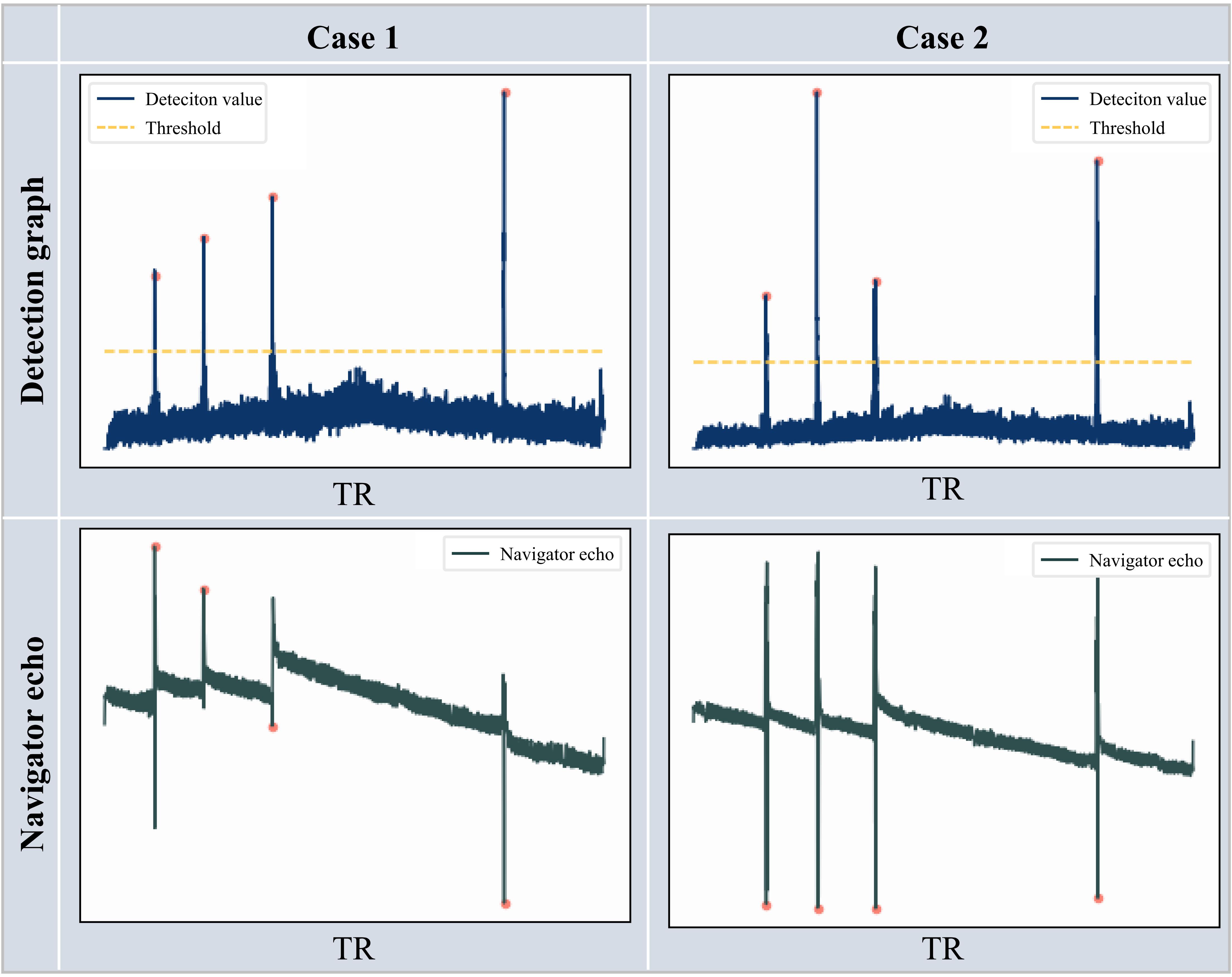
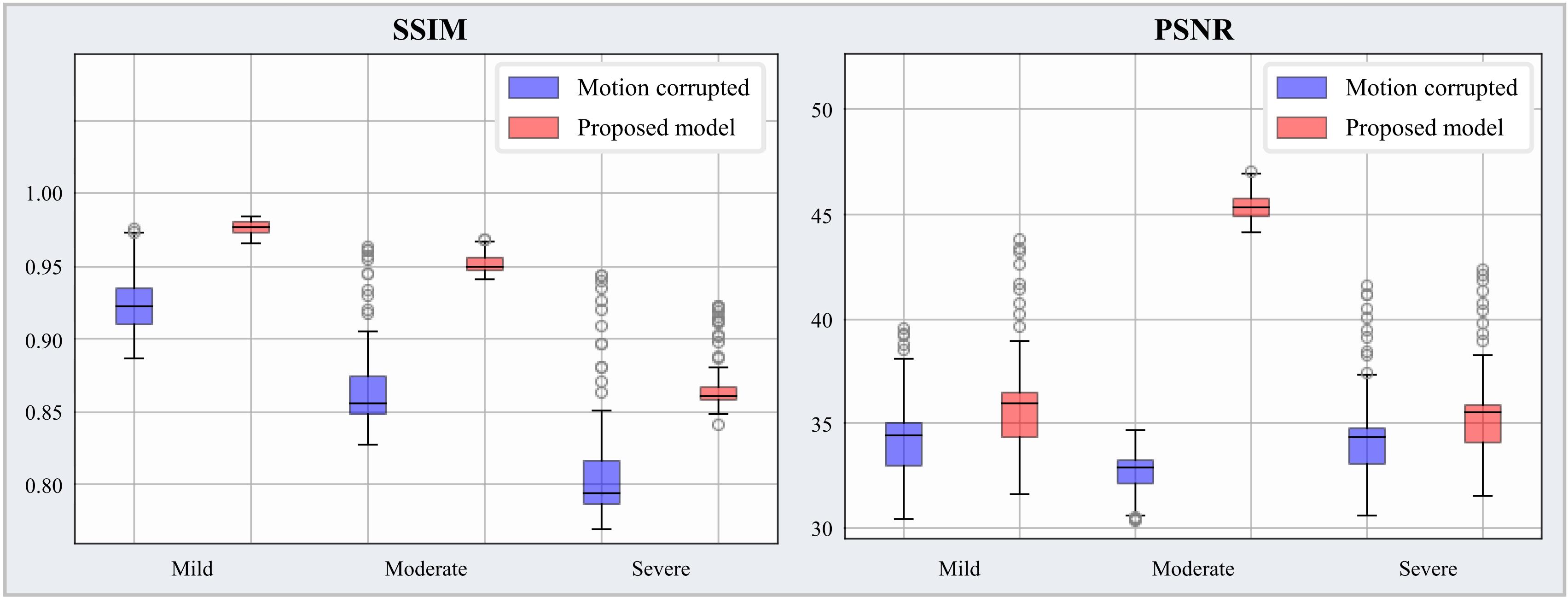
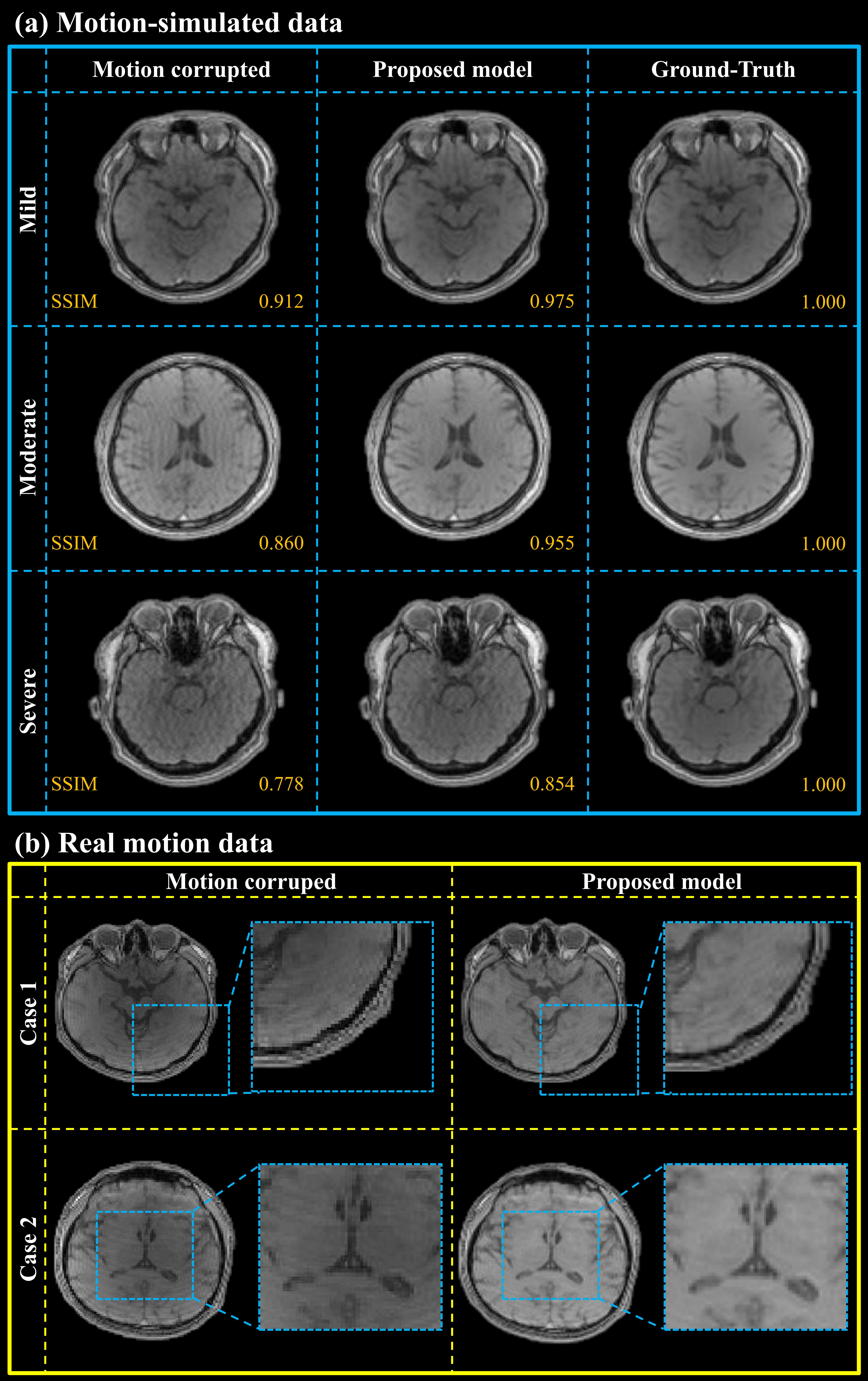
[Evaluation] In the first stage, the detector’s accuracy was evaluated through a direct comparison with corrupted lines in motion-simulated data and by comparing it with navigator echoes in actual motion data. In the second stage, the effectiveness of the proposed model was assessed on three sets of simulated MRI data, each representing mild, moderate, and severe motion scenarios. Additionally, qualitative assessment was conducted for these simulation data, along with two sets of actual motion artifact data.
Results
In the detection process, the locations distorted by motion were accurately identified within simulated MRI data. For MRI data with actual motion artifact, the detector was validated to correctly identify four locations where actual motion occurred by comparing it with navigator echoes (Figure 2).Figure 3 presents boxplots for quantitative evaluation metric that compare original motion-corrupted data and output motion-corrected images. Figure 4 shows the results obtained by the proposed model for both simulation and real motion data.
Discussion and Conclusion
Our proposed deep learning approach for MRI motion correction in the k-space domain has demonstrated promising results in both simulated and real motion datasets. It offers a potential solution for enhancing image clarity and diagnostic reliability. However, the study is constrained by a relatively small dataset, which may impact the model’s generalizability. Future work will focus on augmenting dataset diversity, conducting comparative analysis with other models, and refining the model for widespread clinical adoption.Acknowledgements
This work was supported by the National Research Foundation of Korea (NRF) grant funded by the Korea government (MSIT) (No. NRF-2022R1A4A1030579).References
1.Lee S, Jung S, Jung K-J, Kim D-H. Deep learning in MR motion correction: a brief review and a new motion simulation tool (view2Dmotion). Investigative Magnetic Resonance Imaging. 2020;24(4):196-206.
2. Choi S. 3D mGRE motion detection and analysis [Master’s thesis]. Seoul, Graduate School, Yonsei university; 2022.
3. Yu J, Lin Z, Yang J, Shen X, Lu X, Huang TS. Free-form image inpainting with gated convolution. Paper presented at: Proceedings of the IEEE/CVF international conference on computer vision2019.
Figures