2720
Interventional navigation at a portable MRI system: A pilot study1School of Biomedical Engineering, Shanghai Jiao Tong University, Shanghai, China, 2National Engineering Research Center of Advanced Magnetic Resonance Technologies for Diagnosis and Therapy (NERC-AMRT), Shanghai Jiao Tong University, Shanghai, China, 3School of Design, Shanghai Jiao Tong University, Shanghai, China
Synopsis
Keywords: MR-Guided Interventions, Low-Field MRI, Interventional navigation, portable MRI, EPI,high resolution ,real time imaging
Motivation: Low-field MRI's portability and safety make it appealing for real-time interventional navigation and bedside evaluations, but it lacks efficient navigation strategies.
Goal(s): Our goal was to demonstrate the potential of low-field MRI in navigation by designing efficient and high-resolution echo-planar acquisition sequences.
Approach: We harnessed low-field MRI's long T2 and short T1 properties to design short-TR EPI sequences for real-time navigation and multi-shot EPI sequences for bedside postoperative assessments.
Results: With the short-TR 2D EPI sequence, real-time needle insertion images were successfully obtained, and was improved after denoising. In a self-made resolution phantom, the use of multi-shot EPI greatly improved the image resolution.
Impact: The combination of low-field portable EPI sequences and denoising algorithms highlights their time efficiency in navigation, thus expanding the prospects for low-field portable MRI in the field of navigation.
Introduction
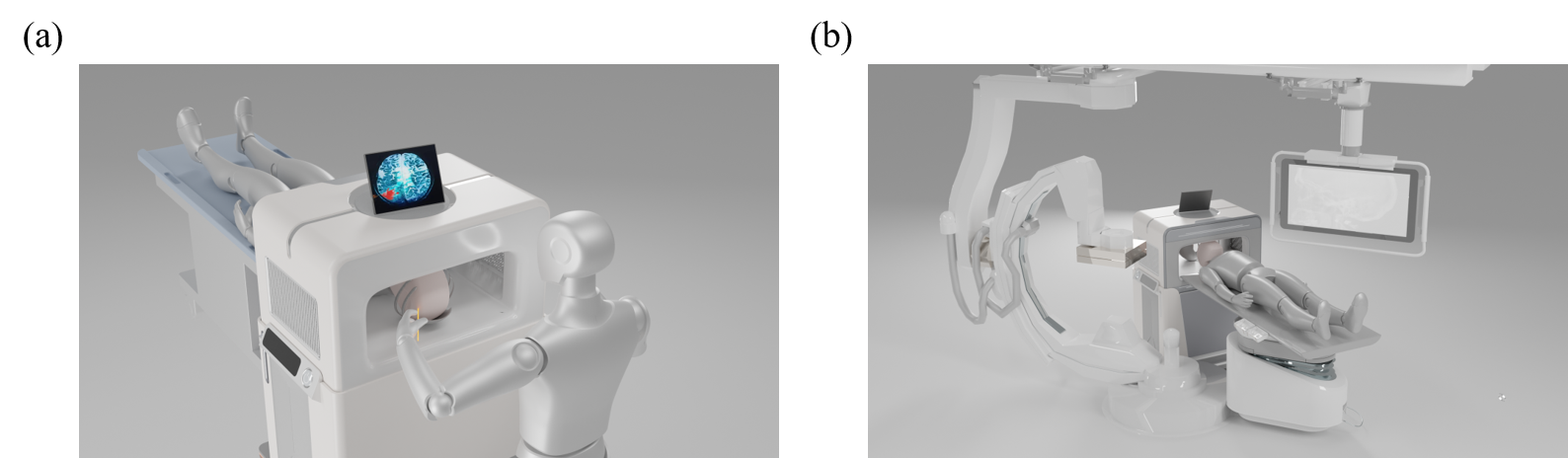
One major advantage of low-field MRI is its portability and low magnetic field strength, making it promising for surgical navigation1-3. In current navigation approaches, radial sequences with coil sensitivity-based sparse undersampling are common, but limitations in coil numbers and significant Eddy current effects hinder their efficiency in low-field MRI4, 5. Echo-planar acquisition, known for its time efficiency and independence from parallel imaging, combined with the advancements in denoising algorithms, can be a more suitable strategy for low-field navigation.We propose two primary applications for echo-planar navigation, as illustrated in Figure 1: real-time intraoperative guidance6 (see in Figure 1(a)) and immediate postoperative bedside assessment7 (see in Figure 1(b)). Considering the long T2 and short T1 characteristics of low-field MRI, the TR of the EPI sequences in low-field MRI can be much shorter. For real-time navigation, we have developed 2D EPI sequences with short TR to visualize the needle insertion process in a human head model, accompanied by BM4D denoising. Additionally, 3D EPI sequences have been designed to assess needle insertion orientation and position in various directions. For postoperative bedside assessment, we have implemented multi-shot EPI sequences to enhance resolution under a self-made resolution water phantom.
Methods
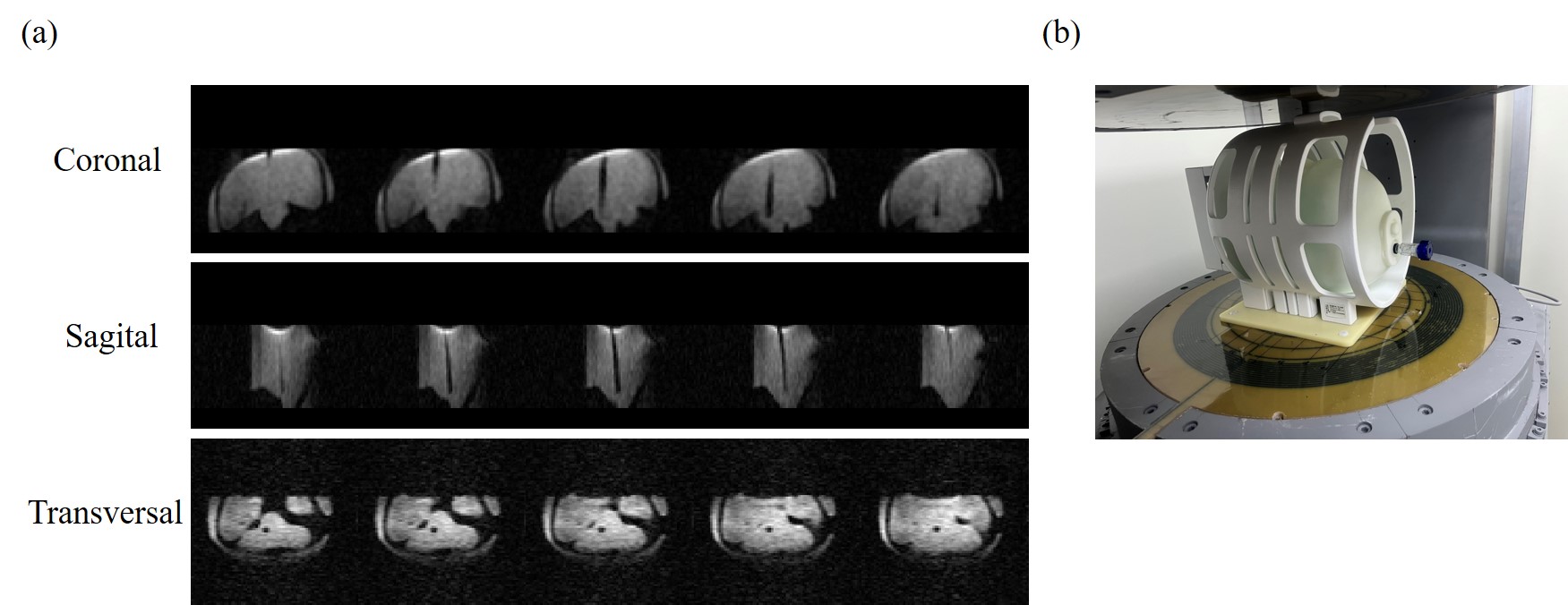
Portable MRI systemAll experiments were conducted on a prototype portable MRI system. The magnet is a SmCo plate permanent magnet with field strength of 110 mT, dimensions of 960 mm × 660 mm × 680 mm, gap of 280 mm after 3-axis gradient installations, and weight of about 750 kg.
Experiment
When designing sequence parameters, given the characteristic of long T2 and short T1 in low-field MRI, we were able to significantly reduce the TR in our EPI sequences. In this study, we achieved a TR as short as 500ms. For the 2D EPI: TR/TE = 500/95 ms; echo spacing = 0.82 ms; NEX = 1; acquisition matrix size = 80 × 80; slice thickness = 10mm; resolution =3 × 3 mm2. For the 3D EPI: TR/TE = 500/105 ms; echo spacing = 0.98 ms; NEX = 1; acquisition matrix size = 96 × 96 × 96; resolution =2.5 × 2.5 × 2.5 mm3. For the single-shot EPI: TR/TE = 2000/105 ms; echo spacing = 0.98 ms; NEX = 4; acquisition matrix size = 96 × 96; slice thickness = 10mm; resolution 2.5 × 2.5 mm2. For the muti-shot EPI: Number of shots = 3; TR/TE = 2000/105 ms; echo spacing = 0.66 ms; NEX = 12; acquisition matrix size = 192 × 192; slice thickness = 10mm; resolution 1.25× 1.25 mm2.
The anthropomorphic MRI phantoms used in this study are based on the MGH 3D-printing CAD phantoms (https://phantoms.martinos.org/Main_Page). The phantom was 3D printed using resin, and for needle insertions,4 mm diameter wooden rods were employed. In the self-made resolution water phantom, there are four sets of stripes, ranging from narrow to wide with widths of 0.9, 1, 2, and 3mm.
Results
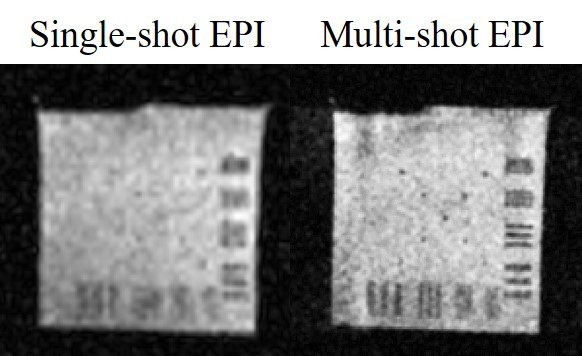
Figure 2 displays the original and denoised images of the needle insertion in 2D EPI. With a time resolution of 500ms, we can see the needle insertion process, which is clearer after BM4D denoising. This illustrates the efficiency of echo-planar acquisitions for navigation and the significant role of denoising algorithms in low-field navigation. Figure 3 presents the needle insertion positions in three different orientations in 3D EPI, demonstrating the three-dimensional localization capability of 3D EPI for surgical navigation. Figure 4 illustrates the imaging results of single-shot EPI and 3-shot EPI images under the same water phantom. It is evident that multi-shot EPI effectively enhances the resolution.Disscusion and Conclusions
The 3D EPI images exhibit some deformations, which were caused by unintended water leakage from the head model during the experiment. More stable experimental results will be provided in the future. EPI images may exhibit distortions in regions with certain magnetic field inhomogeneities. Correction techniques such as TopUp or the use of SPEN sequences may be employed for improvement. Subsequent experiments will further explore short TR EPI sequences for human brain in vivo studies.In this work, we attempted navigation strategies using EPI at low fields and conducted real-time needle insertion experiments under a water phantom. We also explored the use of multi-shot EPI to enhance resolution in low-field imaging.
Acknowledgements
This work is supported by the National Natural Science Foundation of China National Science Foundation of China (No. 62001290 and 62301309), Shanghai Science and Technology Development Funds (21DZ1100300) and sponsored by the National Science and Technology Innovation 2030 Major Project (2022ZD0208601).References
1. Campbell-Washburn, A.E., et al., Opportunities in Interventional and Diagnostic Imaging by Using High-Performance Low-Field-Strength MRI. Radiology, 2019. 293(2): p. 384-393.
2. Marques, J.P., et al., ESMRMB annual meeting roundtable discussion:“when less is more: the view of MRI vendors on low-field MRI”. Magnetic Resonance Materials in Physics, Biology and Medicine, 2021. 34(4): p. 479-482.
3. Basar, B., et al., Susceptibility artifacts from metallic markers and cardiac catheterization devices on a high-performance 0.55 T MRI system. Magnetic resonance imaging, 2021. 77: p. 14-20.
4. Zevenhoven, K.C., et al., Conductive shield for ultra-low-field magnetic resonance imaging: Theory and measurements of eddy currents. Journal of applied physics, 2014. 115(10).
5. Feng, L., Golden‐angle radial MRI: basics, advances, and applications. Journal of Magnetic Resonance Imaging, 2022. 56(1): p. 45-62.
6. Jolesz, F.A., Future perspectives for intraoperative MRI. Neurosurgery Clinics, 2005. 16(1): p. 201-213.
7. Sheth, K.N., et al., Bedside detection of intracranial midline shift using portable magnetic resonance imaging. Scientific Reports, 2022. 12(1): p. 67.
Figures