2670
Hybrid Motion Correction: Prospective Thresholding and Retrospective Residual Correction1TracInnovations, Ballerup, Denmark, 2Athinoula A. Martinos Center for Biomedical Imaging, Massachusetts General Hospital, Charlestown, MA, United States, 3Copenhagen University Hospital, Rigshospitalet, Copenhagen, Denmark
Synopsis
Keywords: Motion Correction, Motion Correction, hybrid motion correction
Motivation: Prospective Motion Correction (PMC) demands real-time tracking and may introduce artifacts due to imperfect tracking due to noise.
Goal(s): To introduce hybridMC, harnessing the strengths of thresholded PMC combined with retrospective motion correction to address motion artifacts comprehensively in neurological MRI.
Approach: Apply a PMC update threshold to avoid incorrect motion correction due to noisy motion tracking. Correct for residual motion artifacts using model-based RMC.
Results: The hybrid motion correction approach showed superior results when compared to PMC in the presence of noisy tracking, while maintaining good performance for non-noisy tracking.
Impact: To enhance neurological MRI quality, we introduce a hybrid motion correction. This innovation effectively mitigates tracking noise and residual artifacts, offering superior results compared to PMC alone. It promises improved diagnostic accuracy.
Introduction
The complexity of human motion necessitates a multifaceted approach to motion correction. While Prospective Motion Correction (PMC) demands real-time tracking and may introduce artifacts due to imperfect tracking or delays, Retrospective Motion Correction (RMC) offers greater robustness but is limited in its ability to correct for large motion. Consequently, we propose a new approach, termed hybridMC, that combines the strengths of thresholded PMC and RMC to comprehensively address motion in MRI.Methods
Data acquisition was performed on a 3T MRI (Siemens Healthcare) using a PMC-enabled, prototype MPRAGE sequence (TR=2000, TI=900, TE=2.32, resolution=0.9x0.9x0.9 mm3, acq.time=4:40min) [1].Rigid-body head motion was recorded with a markerless motion tracking system (Tracoline TCL 3.2, TracInnovations, Ballerup, Denmark) [2, 3]. Tracking noise was induced by decreasing the light intensity (I) of the structured-light stereo vision system to I=20% of its optimal configuration.
The proposed hybrid method uses a motion threshold to correct only for bulk motions in real-time. This was achieved by sending motion updates for PMC only when the recorded motion exceeded a predefined motion score [4] based threshold of T=2mm.
The residual between the fully recorded motion and the thresholded updates defines the basis of the subsequent retrospective correction. Before calculating the residual motion, a 4th-order lowpass Butterworth filter (cut-off frequency of 0.1Hz) was applied. RMC is performed using a model-based approach [5, 6].
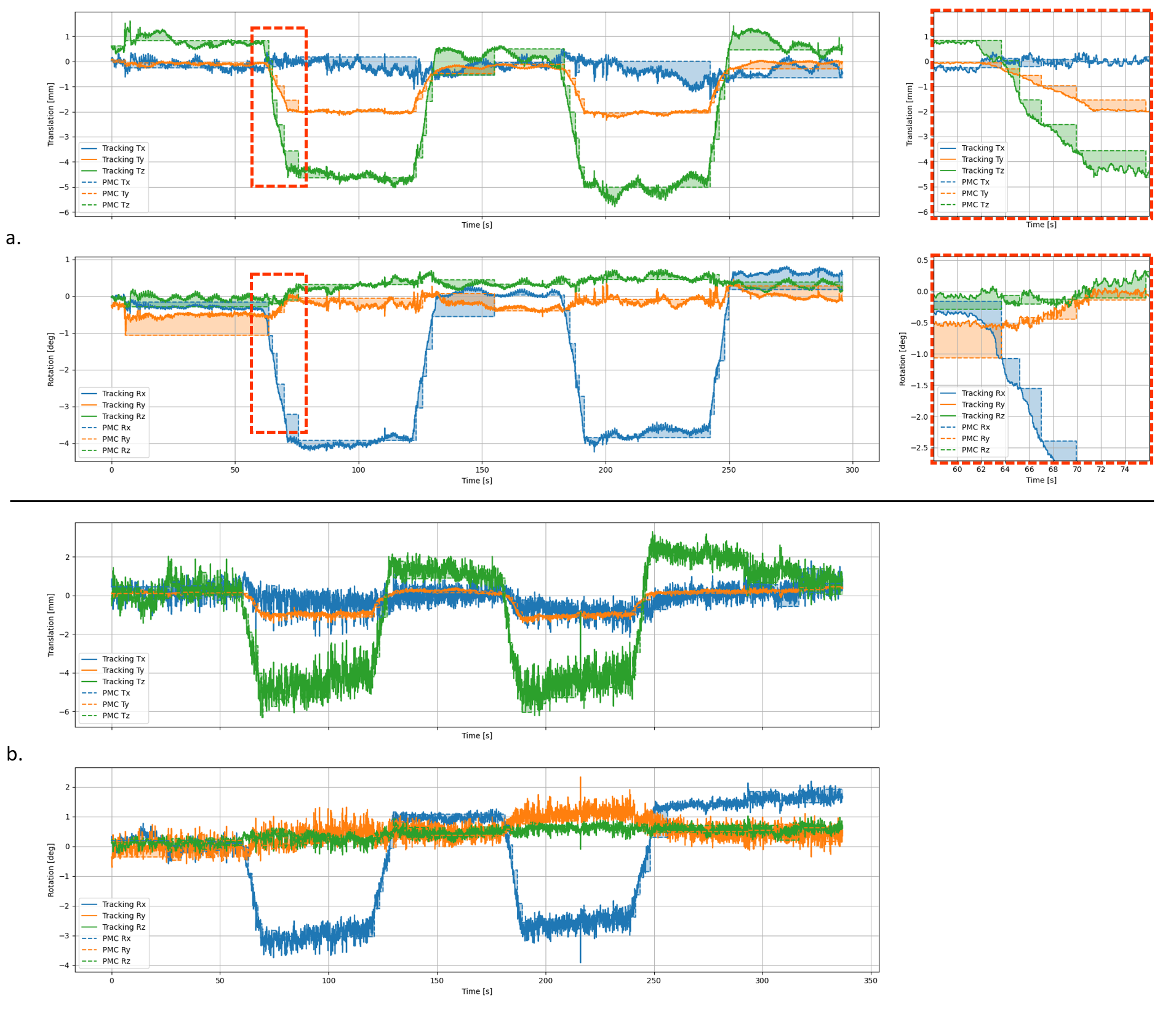
MRI and simultaneous motion tracking was recorded on a healthy adult volunteer. Deliberate motion (Fig. 1) was performed, guided by a video displayed on an in-room screen. HybridMC was tested on four experiments: T=0, I=100; T=2, I=100; T=0, I=20; T=2, I=20.
Image quality was assessed based on the structural similarity index measure (SSIM) [7] with an artifact-free PMCoff still scan as reference. Before calculation of SSIMs, all images were aligned to the reference image using simpleITK rigid registration using default parameters and sinc interpolation. A mask, derived from the reference image (Freesurfer skull strip) was used on each image set.
Results
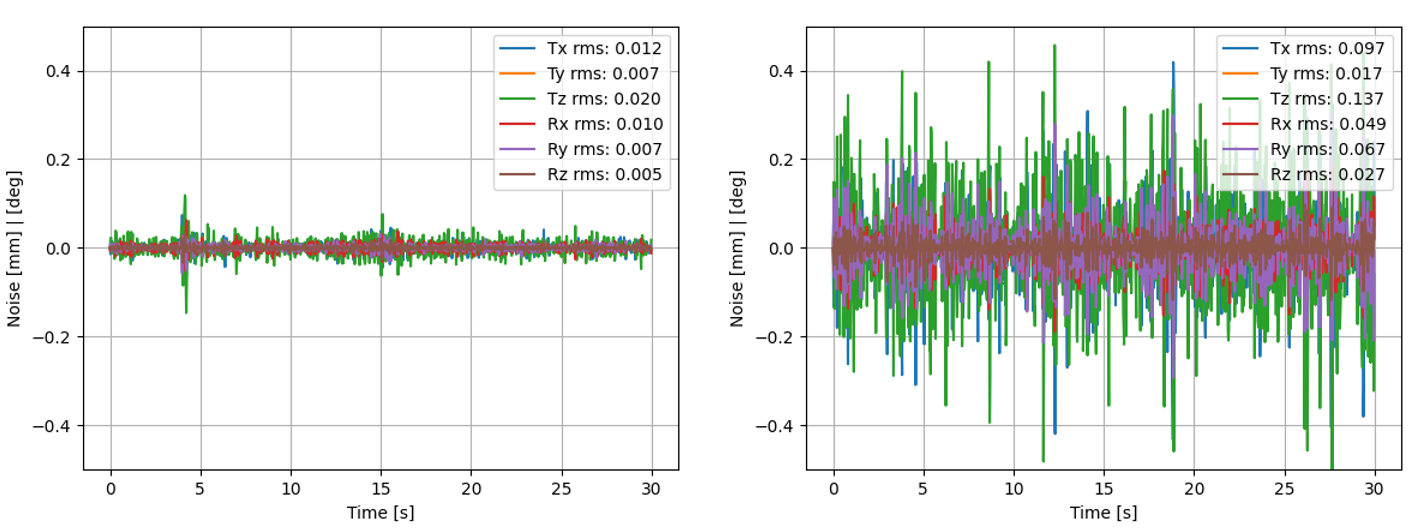
The resulting tracking of a volunteer scan is illustrated in Figure 1 for both I=100 (Fig.1a) and I=20 (Fig.1b).Figure 2 shows the root mean square (RMS) errors for each of the translational and rotational parameters from two tracking data sets with different illumination settings, I=100 and I=20, respectively. The average increase in RMS is 6.2 for all six degrees of freedom.
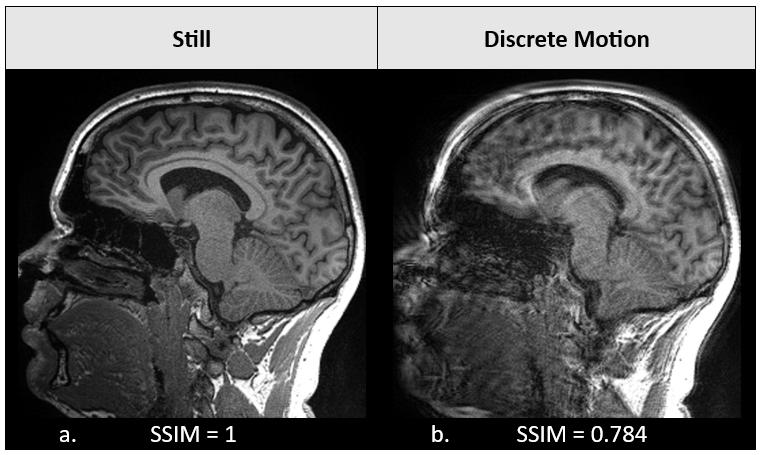
For reference, both a still scan and a non-corrected motion scan are illustrated in Figure 3. The prescribed motion paradigm, reveals pronounced motion artifacts, including blurring and ringing.
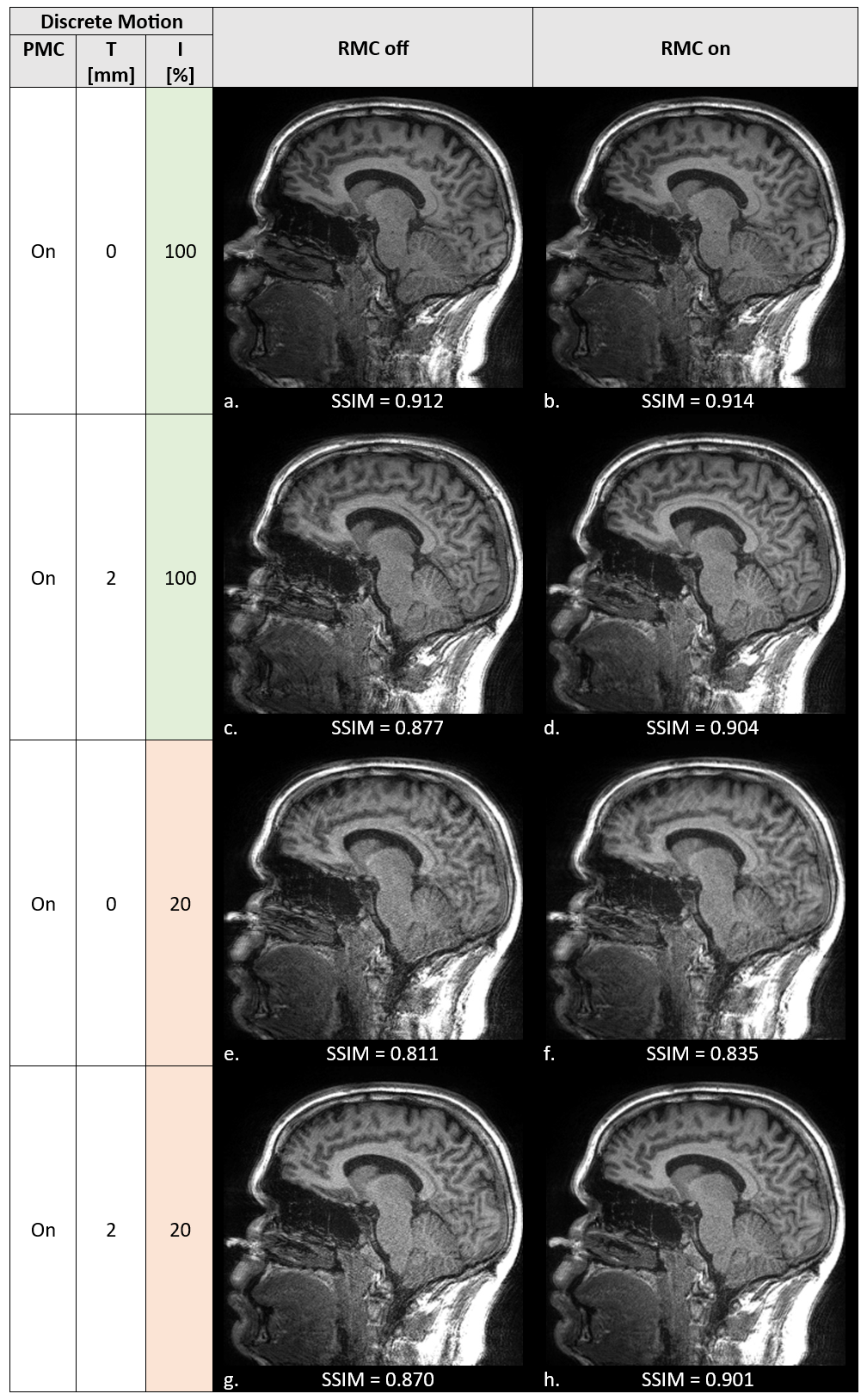
The reconstructions of the performed experiments are displayed in Figure 4 using PMC only (middle column) and hybridMC (right column) including the respective SSIM-values.
Discussion
While the general value of combining PMC and RMC has been explored previously in [8, 9], in this study we focus on the benefit of a hybrid approach in the presence of noisy tracking.The introduced noise may only reflect one type of real-world scenario, but it underscores the relationship between tracking signal-to-noise ratio (SNR) and tracking quality. Similar challenges can arise when users fail to select an appropriate reference surface.
Under optimal conditions with low noise, prospective correction performs very well (Fig.4a), while the addition of retrospective correction shows insignificant improvement of quality (Fig.4b). As expected, when applying a threshold with PMC, performance decreases (Fig.4c), due to fewer accurate real-time updates. Combining RMC yields image quality comparable to the T=0 case (Fig.4d), showcasing the “first-do-no-harm” principle of the hybridMC approach.
Under suboptimal motion tracking conditions (I=20), the presence of noise adversely affects PMC's performance, leading to motion-like artifacts (Fig.4e). Despite this, image quality remains superior to the uncorrected case. After applying RMC to correct residual motions, image quality improves slightly but still contains artifacts (Fig.4f).
In the final scenario, the use of a threshold (T=2) to reduce the number of real-time prospective updates in the presence of noise, results in mediocre PMC's performance (Fig.4g). However, retrospective correction, utilizing a filtered signal for residual motion, notably enhances image quality (Fig.4h) to a level comparable with Fig.4a.
Conclusion
These findings underscore the effectiveness of a hybrid approach that combines thresholded real-time prospective correction with retrospective residual correction. For the motion paradigm performed in this work, the correction of bulk motion prospectively with thresholded motion information and subsequent correction of residual motion with RMC, is shown to be a viable approach under imperfect tracking circumstances, while providing comparable performance to PMC under ideal tracking conditions. Further work is needed to determine efficacy during different types of motion and tracking conditions.Acknowledgements
No acknowledgement found.References
1. Frost R, Wighton P, Karahanoğlu FI, et al. Markerless high-frequency prospective motion correction for neuroanatomical MRI. Magn. Reson. Med. 2019;82:126–144 doi: 10.1002/mrm.27705.
2. Slipsager JM, Glimberg SL, Højgaard L, et al. Comparison of prospective and retrospective motion correction in 3D-encoded neuroanatomical MRI. Magn. Reson. Med. 2022;87:629–645 doi: 10.1002/mrm.28991.
3. Olesen OV, Paulsen RR, Hojgaard L, Roed B, Larsen R. Motion Tracking for Medical Imaging: A Nonvisible Structured Light Tracking Approach. IEEE Trans. Med. Imaging 2012;31:79–87 doi: 10.1109/TMI.2011.2165157.
4. Tisdall MD, Hess AT, Reuter M, Meintjes EM, Fischl B, van der Kouwe AJW. Volumetric Navigators (vNavs) for Prospective Motion Correction and Selective Reacquisition in Neuroanatomical MRI. Magn. Reson. Med. 2012;68:389–399 doi: 10.1002/mrm.23228.
5. Laustsen M, Slipsager J, Gaass T, et al. Selective MRI reacquisition to extend the working range of retrospective motion correction. ISMRM 2023
6. Gallichan, D., Marques, J.P. and Gruetter, R. (2016), Retrospective correction of involuntary microscopic head movement using highly accelerated fat image navigators (3D FatNavs) at 7T. Magn. Reson. Med., 75: 1030-1039.
7. Wang, Zhou; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. (2004-04-01). "Image quality assessment: from error visibility to structural similarity". IEEE Transactions on Image Processing. 13 (4): 600–612
8. Maclaren J, Lee KJ, Luengviriya C, et al. Combined Prospective and Retrospective Motion Correction to Relax Navigator Requirements. Magn. Reason. Med. 2011;65:1724–1732 doi: 10.1002/mrm.22754
9. Hucker, P, Dacko, M, Zaitsev, M. Combining prospective and retrospective motion correction based on a model for fast continuous motion. Magn Reson Med. 2021; 86: 1284–1298.
Figures