2664
Motion Tracking inside the MRI scanner using gradient artifacts in EEG-fMRI1Dept. of Biomedical Engineering, University of Calgary, Calgary, AB, Canada, 2Dept. of Radiology, Dept. of Paediatrics, University of Calgary, Calgary, AB, Canada
Synopsis
Keywords: Motion Correction, Motion Correction, EEG-fMRI
Motivation: Motion tracking in EEG-fMRI has been a challenging area of research in recent years, with existing approaches frequently suffering from limitations in spatial and temporal resolution or requiring additional hardware or calibration scans.
Goal(s): We aim to introduce a motion-tracking approach by modelling the gradient artifacts induced in EEG recordings during EEG-fMRI studies.
Approach: We introduce an algorithm tailored for detecting rigid and non-rigid head motion in EEG-fMRI data and aim to assess its performance by comparing it with camera-based motion detection techniques.
Results: We have demonstrated the capability of our algorithm to accurately identify motion in EEG-fMRI.
Impact: Our method shows potential across a range of uses, such as enhancing EEG data quality, especially in the context of reducing motion-related artifacts in EEG-fMRI studies.
Introduction
Switching gradients generate currents within wire loops, as described by Faraday's Law of Induction. Consequently, this leads to the creation of gradient artifacts in EEG recordings during MRI scans. These artifacts are influenced by the orientation and placement of the wire loops and hold valuable information from motion during recording 1. We can effectively track subject motion by knowing the positions and orientations of these wire loops. With this in mind, we introduce an approach for motion estimation within the scanner by modelling the gradient artifacts induced in EEG recordings during EEG-fMRI studies.Materials and methods
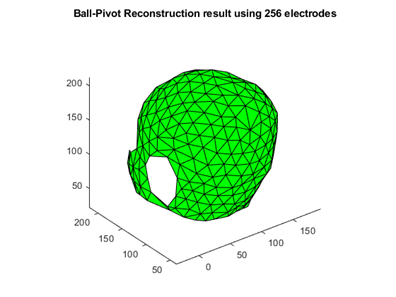
EEG-fMRI data were acquired on a Siemens Prisma 3T scanner with a 256-channel MR-compatible EEG cap (MagStim EGI, USA) at a sampling rate of 1000 Hz. The fMRI protocol used the MREG sequence (TE/TR=25/100ms, flip angle 25°, 3x3x3mm voxel size, 5-minute acquisition time). To monitor head movement in the MRI scanner, a marker-based camera system (Metria Innovation, USA) was employed to measure rigid head motion concurrently with the EEG-fMRI data acquisition.Our motion tracking algorithm comprises two primary steps. The first step involves localizing the EEG electrodes and the wire loops of the EEG system. The electrodes were localized and labelled manually on T1-weighted anatomical images. The wire loops were modelled as triangles formed by connecting every three adjacent electrodes. To create these triangles, we employed the Ball-Pivot Reconstruction method as described in reference 2. These extracted surfaces (Figure 1) served as the basis for identifying loops with gradient artifacts.
In the second step, we utilized Faraday's law to estimate motion artifacts arising from the gradient artifacts in each loop. This involved calculating the voltage induced in each loop according to their position and to the known gradient waveforms during the scan. This resulted in a series of non-linear equations as in in reference 3, which were solved by the Levenberg-Marquardt algorithm to estimate the motion. Subsequently, the estimated motion was compared with data obtained from the camera system for validation.
Results
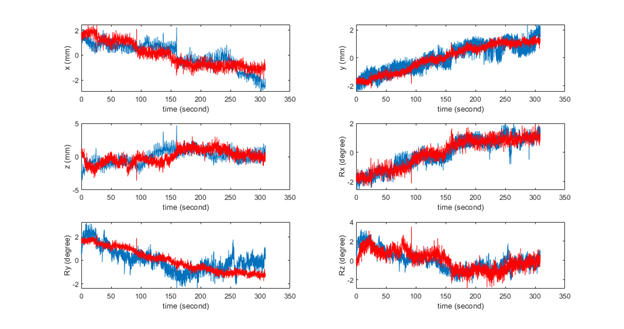
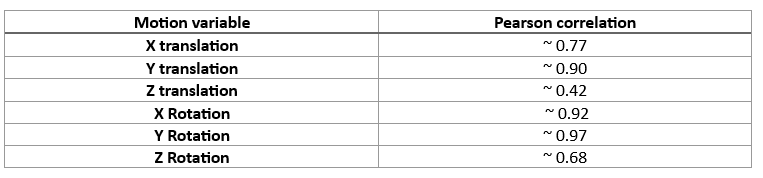
Figure 2 shows the motion time courses from one scan with six degrees of freedom (x-y-z translations and rotations), comparing the motion estimated from the EEG model and the motion measured by the camera. The time courses are qualitatively similar and exhibit high correlations, which are reported in Figure 3.Discussion/Conclusion
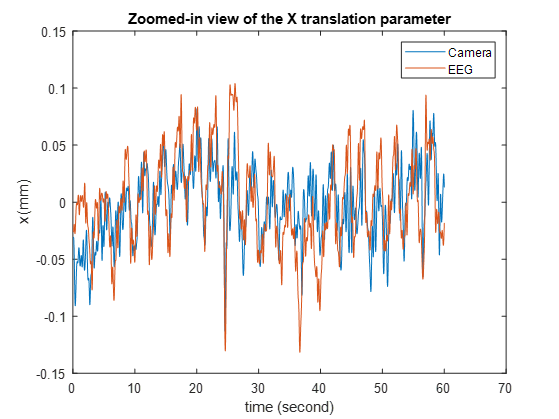
We have shown that our algorithm is capable of effectively identifying motion during EEG-fMRI experiments. Furthermore, the EEG model has the capacity to monitor respiratory movements (Figure 4), similar to the capabilities of the camera system. Moreover, our proposed approach performs direct modelling of the gradient artifacts and therefore does not need a calibration scan to relate the gradient artifacts to specific motion. This innovative technique holds promise for a variety of applications, including EEG denoising, particularly in the context of mitigating motion artifacts during EEG-fMRI experiments.Acknowledgements
This work was supported by NSERC Discovery Grant RGPIN-2021-02797 and CIHR grant PJT-183825.References
1. Yan, Winston X., et al. "Understanding gradient artifacts in simultaneous EEG/fMRI." Neuroimage 46.2 (2009): 459-471.
2. Bernardini, Fausto, et al. "The ball-pivoting algorithm for surface reconstruction." IEEE transactions on visualization and computer graphics 5.4 (1999): 349-359.
3. Laustsen, Malte, et al. "Tracking of rigid head motion during MRI using an EEG system." Magnetic Resonance in Medicine 88.2 (2022): 986-1001.
Figures