2232
Adaptive Plane Reformatting for 4D Flow MRI using Deep Reinforcement Learning1Biomedical Imaging Center, Pontificia Universidad Catolica de Chile, Santiago, Chile, 2Millennium Institute for Intelligent Healthcare Engineering, iHEALTH, Santiago, Chile, 3Department of Electrical Engineering, Pontificia Universidad Catolica de Chile, Santiago, Chile, 4Departamento de Informática, Universidad Técnica Federico Santa Maria, Santiago, Chile, 5Faculty of Engineering, Universidad Alberto Hurtado, Santiago, Chile, 6Biomedical Imaging Center, Pontificia Universidad Católica de chile, Santiago, Chile, 7Institute for Biological and Medical Engineering, Pontificia Universidad Catolica de Chile, Santiago, Chile, 8Department of Radiology, Pontificia Universidad Católica de chile, Santiago, Chile, 9Computer Science Department, Pontifici Universidad Catolica de Chile, Santiago, Chile, 10Centro Nacional de Inteligencia Artificial, CENIA, Santiago, Chile, 11Stephenson Cardiac Imaging Centre, Department of Radiology, University of Calgary, Calgary, AB, Canada, 12Department of Cardiology, Hospital Universitari Vall d'Hebron, CIBER-CV, Vall d'Hebron Institut de Recerca (VHIR), Barcelona, Spain, 13Department of Cardiology and Cardiovascular Surgery, Papa Giovanni XXIII Hospital, Bergamo, Italy, 14Department of Medical Imaging and Radiation Sciences, Monash University, Melbourne, Australia
Synopsis
Keywords: Analysis/Processing, Velocity & Flow, Plane reformatting, Deep reinforcement learning
Motivation: The standard approach for plane reformatting in 4D flow MRI is manual, leading to time-consuming and user-dependent results.
Goal(s): Our goal was to enhance plane reformatting in 4D flow MRI and overcome limitations associated with existing automated methods.
Approach: We introduce a novel approach that employs deep reinforcement learning (DRL) with a flexible coordinate system for precise and adaptable plane reformatting.
Results: Results demonstrate superior performance compared to baseline DRL and similar outcomes compared to those of landmark-based techniques, showing its potential for use in complex medical imaging scenarios beyond 4D flow MRI.
Impact: The proposed framework allows for automated, precise, and adaptive plane reformatting, facilitating the use of 4D flow MRI in clinical routines. It was trained with data sets from different vendors, making this approach widely applicable.
Introduction
4D flow MRI provides time-resolved velocity fields in a volumetric region of interest, enabling advanced hemodynamic characterization of cardiovascular diseases in the heart and great vessels1,2. Plane reformatting within the volumetric region provides specific hemodynamic analyses of various vessels in the cardiovascular system. However, this process is typically carried out manually3, resulting in a time-consuming, cumbersome, and user-dependent results. Existing techniques for automating this process, like atlas-based deformable registration4, rely on image similarity and may fail in abnormal hearts. Approaches based on landmark localization5,6 are constrained by the low spatial resolution of 4D flow MRI, posing challenges for accurate landmark identification. Deep reinforcement learning (DRL) algorithms7,8 utilize an agent that adjusts sequentially the position and orientation of an initial plane, enabling accurate plane reformatting without detailed landmarks, making it suitable for images with limited contrast and resolution, such as 4D Flow MRI. However, current DRL methods rely on a fixed coordinate system to modify planes, which restricts their adaptability to volumes at various positions or orientations. Therefore, these methods require a registration process, which highly depends on image similarity between acquisitions. We present a novel technique for plane reformatting using DRL. Our approach incorporates a flexible coordinate system based on the current state, enabling navigation across different rotations and positions.Methods
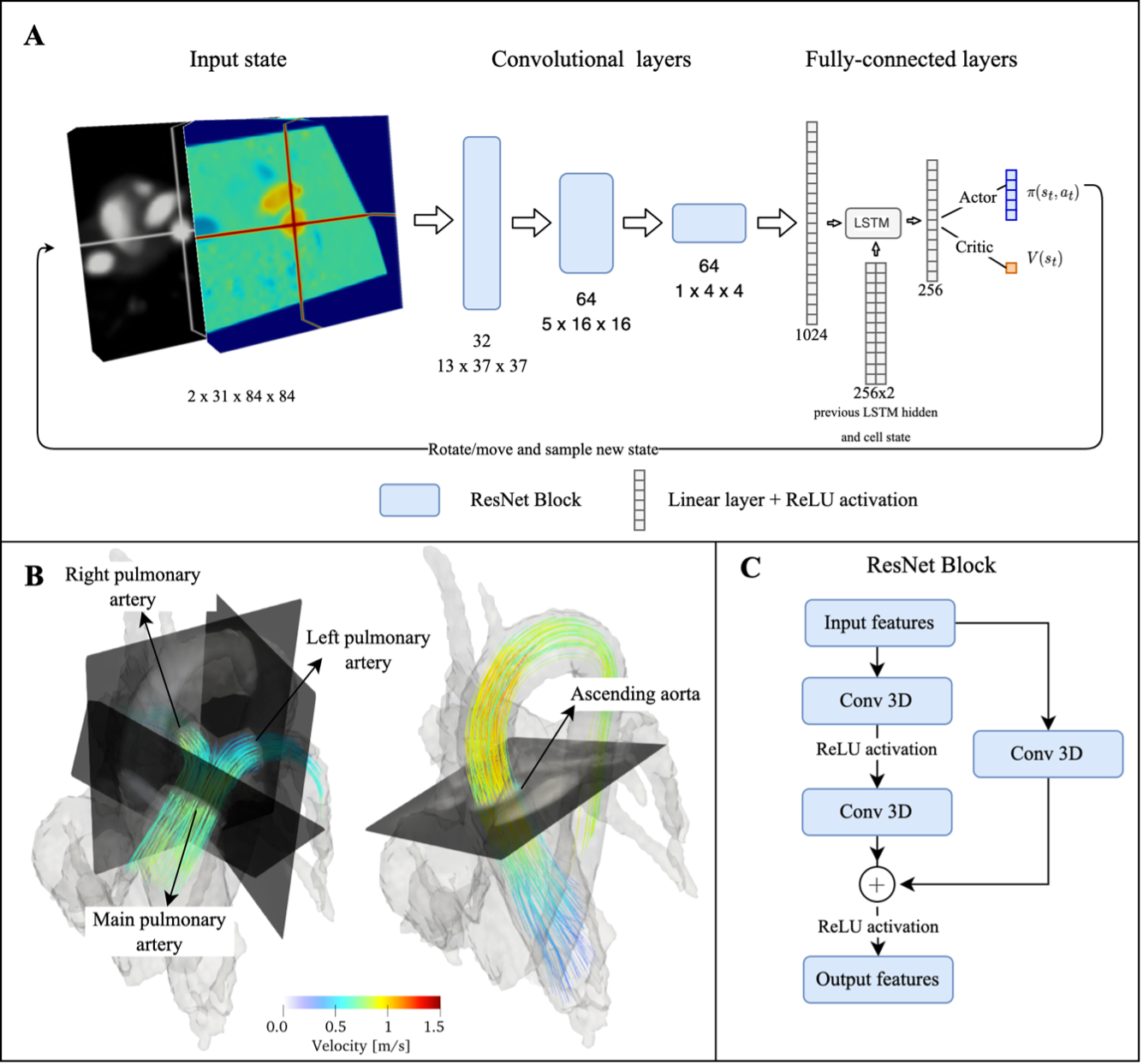
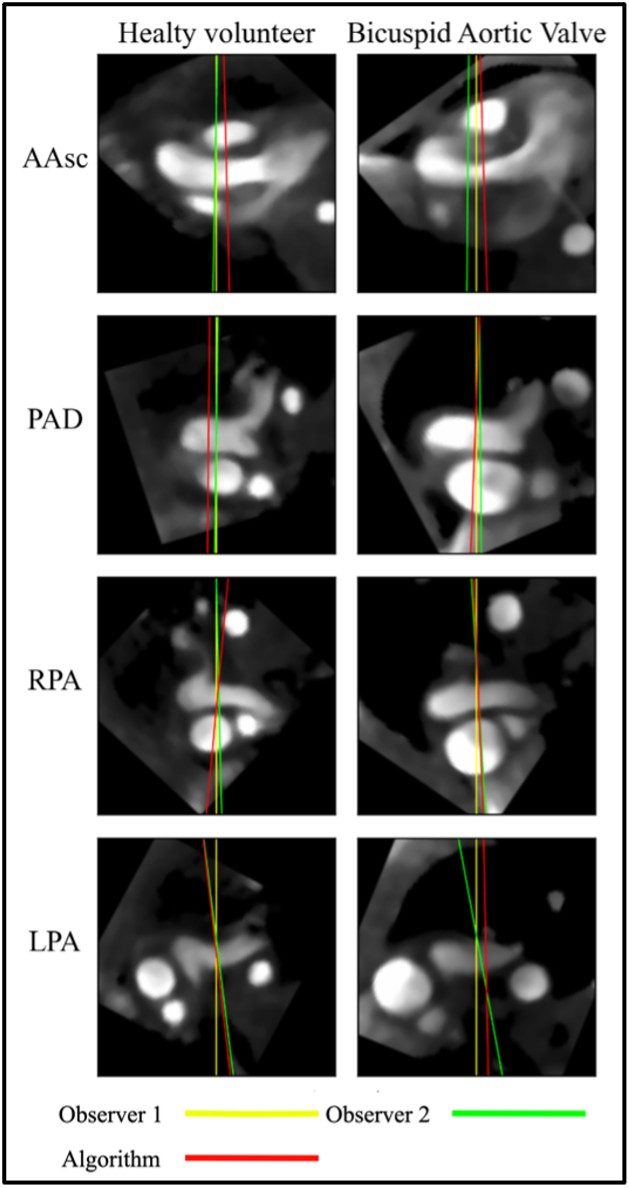
Using a reinforcement learning framework, we iteratively update two stacks of planes derived from 4D Flow MRI to reach a target location. These stacks are composed of Phase Contrast - Magnetic Resonance Angiography (PC-MRA)9 and velocities at peak systole, where the middle plane of the stacks defines the reformatted plane location and orientation. The proposed approach decouples the actions for plane rotation and translation from the volume's position and orientation. Instead, they solely depend on the current state. To achieve this, we used an arbitrary coordinate system for each sampled plane, characterized by horizontal, vertical and normal directions. These directions are drawn on top of each image to guide the network's learning of navigation (Figure 1). We employed the Asynchronous Advantage Actor Critic (A3C) algorithm10 to train a convolutional neural network that maps every state to the specific rotations and translations for the current stack of planes. We processed 4D Flow MRI data from GE, Siemens, and Philips scans of 67 healthy volunteers and 21 patients with congenital heart defects. Plane reformatting was conducted on 4 vessels: Ascending Aorta (AAsc), Distal Pulmonary Artery (PAD), Right Pulmonary Artery (RPA), and Left Pulmonary Artery (LPA) (Figure 2). Manual annotations of two observers were performed to assess inter-observer variability. The network was trained with the planes placed by the first observer. To evaluate the plane reformatting we performed a 4-fold cross-validation to compare automated vs manual reformatted planes in terms of angle difference between the normal vectors that defines both planes; the distance between plane centers; and the flow difference in a cardiac cycle.Results
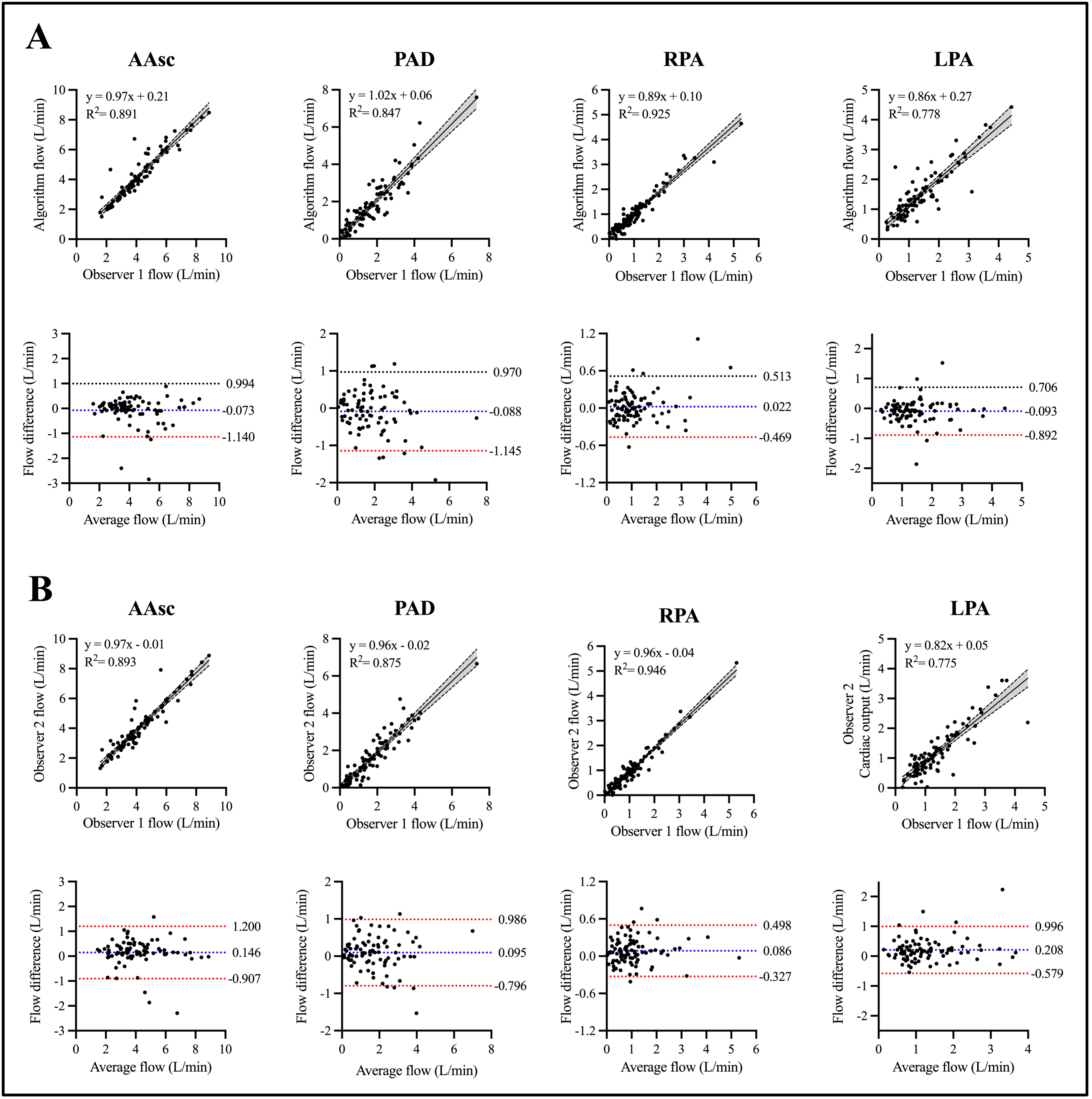
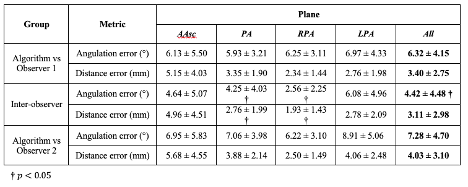
Figure 2 shows the plane angulation of reformatted planes across the main vessels. Considering all vessels, our method achieved an angle error of 6.32º ± 4.15° and a distance error of 3.40 ± 2.75 mm in comparison to the manual planes placed the first observer, and an angle error of 7.28º ± 4.70° and a distance error of 4.03 ± 3.10 mm in comparison to the manual planes placed the second observer (Table 1). The higher errors observed in the comparison with the second observer are attributable to the inter-observer variability. The inter-observer errors were lower, with statistically different result for the PA and RPA. Our method did not show any statistical difference in flow with manual quantification. The Bland & Altman and regression plots (Figure 3) shows the great accuracy and low bias achieved by our method. We can see that bias, limits of agreement, and correlation between the algorithm and the first observer are similar to those between observers.Discussion
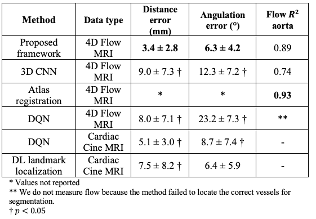
Our approach has the ability to perform plane reformatting accurately, without precise landmark definition. It was consistent across diverse orientations, making it a promising tool for complex medical imaging scenarios. When comparing with previous methods, the proposed approach exhibited superior performance compared to the baseline DRL plane reformatting7 and similar performance to the landmark-based technique6 (Table 2). The method's flexibility and adaptability make it a perfect candidate for other medical imaging applications beyond 4D flow MRI.Conclusion
We developed and validated an adaptive and automated plane reformatting framework for accurate plane reformatting in 4D flow MRI, which remains consistent across different volume positions and orientations, significantly improving overall performance and advancing 4D flow quantification in the clinical routine.Acknowledgements
This work was funded by ANID - Millennium Science Initiative Program - ICN2021_004. ANID-FONDECYT de iniciación en investigación 11200481 and Fondecyt 1231535.References
[1] M. Markl, A. Frydrychowicz, S. Kozerke, M. Hope, and O. Wieben, “4D flow MRI,” J. Magn. Reson. Imaging, vol. 36, no. 5, pp. 1015–1036, Nov. 2012, doi: 10.1002/jmri.23632.
[2] J. Sotelo et al., “Fully Three-Dimensional Hemodynamic Characterization of Altered Blood Flow in Bicuspid Aortic Valve Patients With Respect to Aortic Dilatation: A Finite Element Approach,” Front. Cardiovasc. Med., vol. 9, p. 885338, May 2022, doi: 10.3389/fcvm.2022.885338.
[3] M. M. Bissell et al., “4D Flow cardiovascular magnetic resonance consensus statement: 2023 update,” J. Cardiovasc. Magn. Reson., vol. 25, no. 1, p. 40, Jul. 2023, doi: 10.1186/s12968-023-00942-z.
[4] M. Bustamante et al., “Atlas-based analysis of 4D flow CMR: Automated vessel segmentation and flow quantification,” J. Cardiovasc. Magn. Reson., vol. 17, no. 1, p. 87, Dec. 2015, doi: 10.1186/s12968-015-0190-5.
[5] A. Alansary et al., “Evaluating reinforcement learning agents for anatomical landmark detection,” Med. Image Anal., vol. 53, pp. 156–164, Apr. 2019, doi: 10.1016/j.media.2019.02.007.
[6] K. Blansit, T. Retson, E. Masutani, N. Bahrami, and A. Hsiao, “Deep Learning–based Prescription of Cardiac MRI Planes,” Radiol. Artif. Intell., vol. 1, no. 6, p. e180069, Nov. 2019, doi: 10.1148/ryai.2019180069.
[7] A. Alansary et al., “Automatic View Planning with Multi-scale Deep Reinforcement Learning Agents.” arXiv, Jun. 08, 2018. Accessed: Apr. 28, 2023. [Online]. Available: http://arxiv.org/abs/1806.03228.
[8] Y. Huang et al., “Searching Collaborative Agents for Multi-plane Localization in 3D Ultrasound.” arXiv, Jul. 30, 2020. Accessed: Apr. 28, 2023. [Online]. Available: http://arxiv.org/abs/2007.15273.
[9] M. Markl, P. J. Kilner, and T. Ebbers, “Comprehensive 4D velocity mapping of the heart and great vessels by cardiovascular magnetic resonance,” 2011.
[10] V. Mnih et al., “Asynchronous Methods for Deep Reinforcement Learning.” arXiv, Jun. 16, 2016. Accessed: Apr. 28, 2023. [Online]. Available: http://arxiv.org/abs/1602.01783
Figures