1433
Development of an Inexpensive MRI-Compatible Force Measurement Device1Mechanical Science and Engineering, University of Illinois Urbana-Champaign, Urbana, IL, United States, 2University of Illinois Urbana-Champaign, Urbana, IL, United States, 3Bioengineering, University of Illinois Urbana-Champaign, Urbana, IL, United States
Synopsis
Keywords: New Devices, New Devices, Force Measurement
Motivation: Conventional load cells are not MRI-compatible, and MRI-compatible fiber optic force sensors are expensive and require specialized data collection systems.
Goal(s): Our goal was to develop and test a low-cost, MRI-compatible device for continuous force measurement.
Approach: We developed a hydraulic-based system for measuring continuous compressive forces within the magnet bore during scans.
Results: Pre-cycling increased the measurement repeatability of the device. The device was completely MRI-compatible and measured continuous compressive forces while simultaneous MRI data was acquired.
Impact: Our newly developed device is an inexpensive option for measuring continuous compressive forces during simultaneous MRI scans and is particularly useful for researchers who want to use a conventional electronic data acquisition system.
Introduction
The ability to acquire MR images with simultaneous force measurement has become particularly desirable for functional MRI1, muscle2, and tissue mechanics research3 and motivates efforts to develop MRI-compatible force measurement systems. Traditional load cells, which use resistive strain gauges, have been used within the MRI environment2 but are not considered MRI-compatible because of metallic components and electrical noise4. Although MRI-compatible force sensors5 are commercially available, they are expensive and require specialized data collection systems. A custom hydraulic force sensor has been used for measuring handgrip forces within the MRI environment1 but was unable to resolve forces smaller than 80 newtons (N). Therefore, the aim of this study was to develop and test a low-cost, MRI-compatible solution for accurately measuring continuous compressive forces.Methods
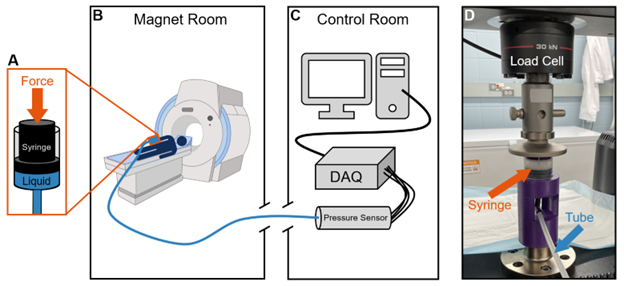
We developed a hydraulic-based system in which force is applied to a piston that is in contact with an incompressible fluid held within a tube. The other end of the tube is attached to a pressure sensor (Omega PX309-100GV) and data acquisition equipment (National Instruments NI 9237 C Series) outside of the magnet room. Water was used as the incompressible liquid and filled a 30-foot polyethylene tube with an inner diameter of 6mm. A commercial plastic syringe (Kikhope) with a rubber piston and an inner diameter of 1.69in served as the piston component.To test and calibrate the pressure sensor, the hydraulic system was assembled within a materials testing machine (Instron 5960 Series) using custom fixtures. A compressive load was applied to the piston head and the applied forces from the testing machine were recorded (1000Hz sampling rate) along with the pressure from the pressure sensor (2000Hz sampling rate). The force and pressure data were synchronized and used to develop a force-pressure calibration curve.
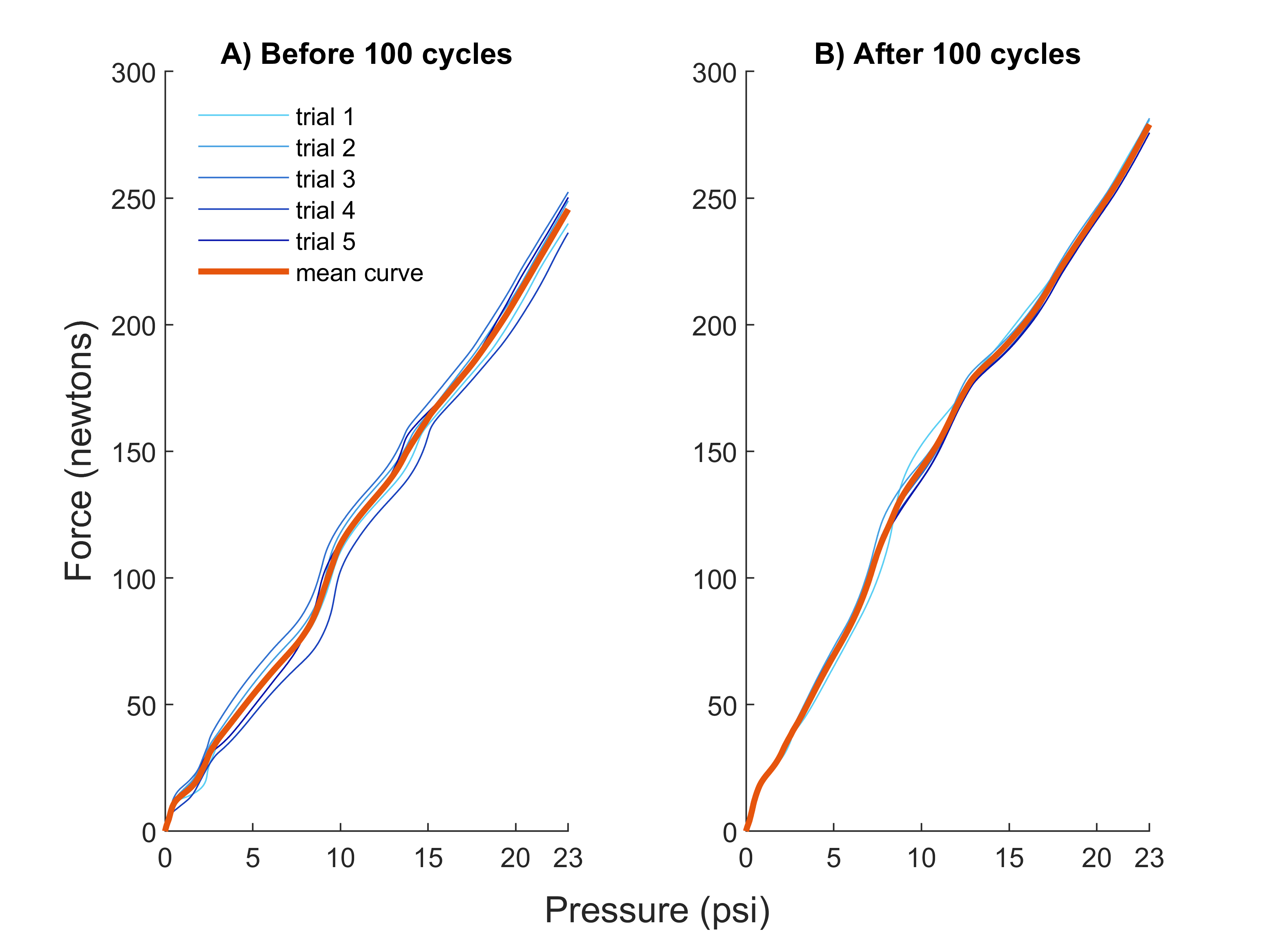
We tested the effect of pre-cycling, which is the application of cyclically applied forces, on the system and calculated the root-mean-square-error (RMSE), relative to the mean curve, to assess variability. Two different syringes were used for testing the effects of pre-cycling and the final calibration. Finally, the device was tested on a human subject while simultaneous spatial modulation of magnetization (SPAMM) MRI data were acquired using a 3T MRI scanner (Siemens MAGNETOM PRISMA).
Results
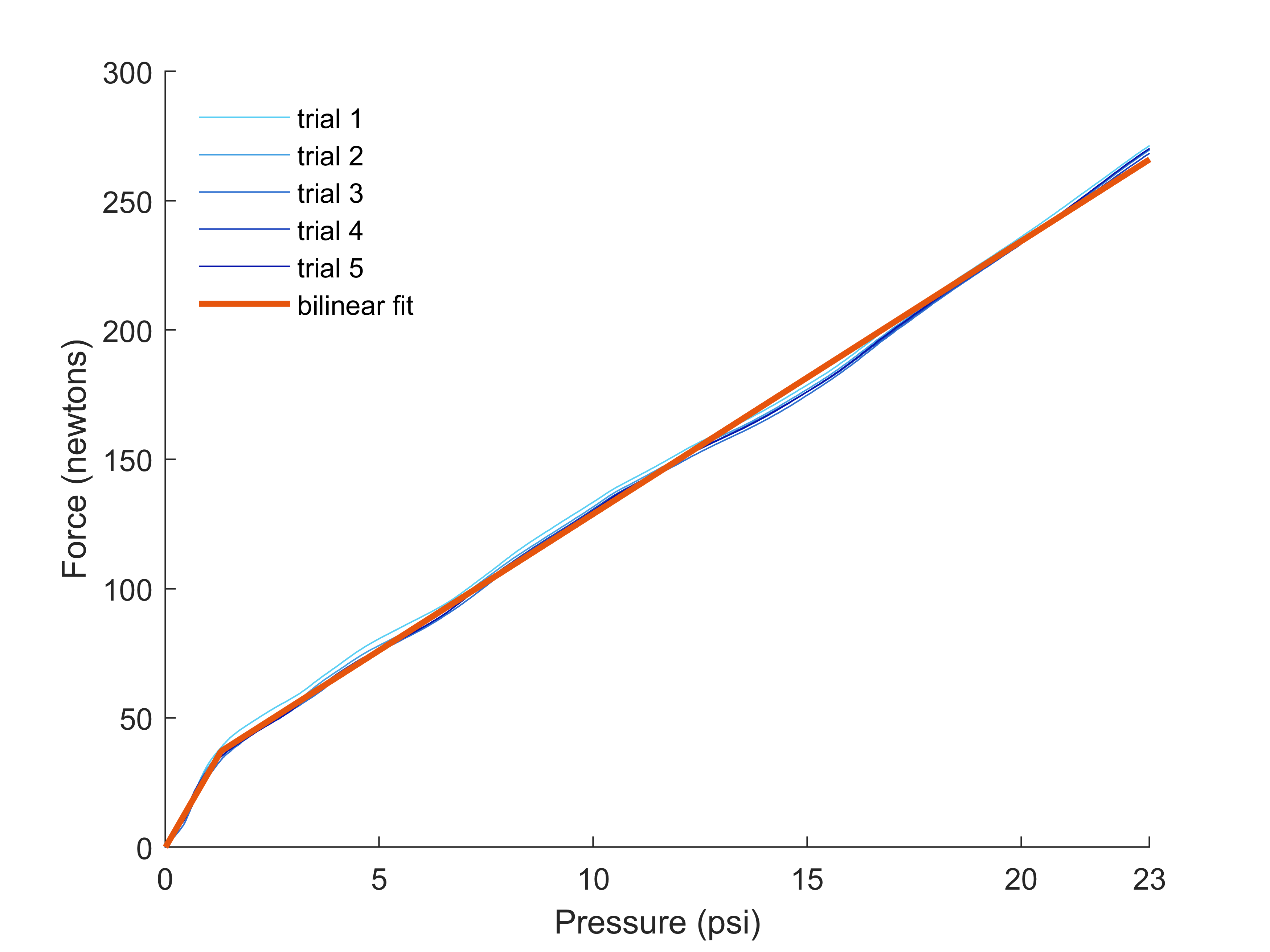
Pre-cycling of the hydraulic system (n=100cycles) resulted in decreased variability of the force-pressure data. The force RMSE before pre-cycling was nearly double (5.74N) that of the pre-cycled force RMSE (2.86N, Fig 2).The force-pressure relationship was bilinear in nature with an initial slope of 28.62N/psi from 0-1.31psi, after which the relationship transitioned to a terminal slope of 10.54N/psi (Fig 3).
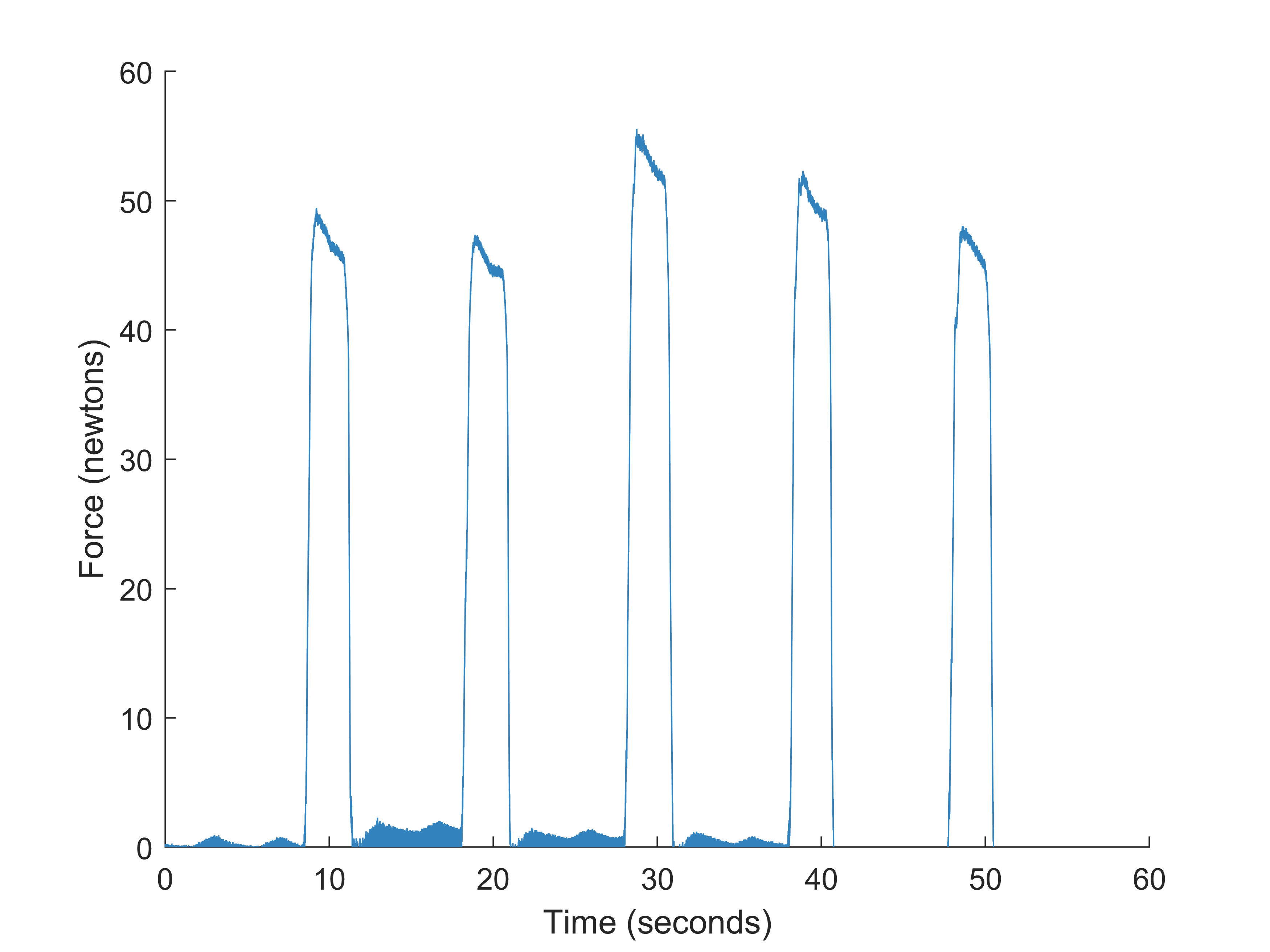
The device has been successfully used within the bore of a 3T MRI scanner with no artifacts observed in the pressure/force data (Fig 4) or MRI data.
Discussion
We have developed a repeatable and inexpensive MRI-compatible device for measuring uniaxial forces within an MRI scanner. The total cost of the system (not including the DAQ) was $250, which was mostly from the cost of pressure sensor ($200).Critical to the repeatability of the force measurement is the need for pre-cycling, which decreased the variability of the force-pressure relationship (Fig 2). We also found that the force-pressure relationship was bilinear, with a steeper initial slope followed by a shallower terminal slope (Fig 3). The steeper initial slope is likely due to deformation of the rubber piston and friction with the plastic walls of the syringe at low forces. The theoretical force-pressure relationship, determined by dividing the force by the cross-sectional area of the syringe, is linear with a slope of 9.98N/psi.
Notably, the steeper initial region in Figure 2 ends at a smaller force value than in Figure 3. Variation in the manufacturing of the syringes may contribute to the differing initial slopes measured. Thus, the calibration curve should be recalculated for each syringe used.
A limitation of this device is that it cannot measure multiaxial loads and can only measure compression, which might be unsuitable for certain applications. However, the device could be used to measure tensile loads with appropriate changes to experiment apparatus configuration.
Conclusion
This newly developed device measured continuous compressive force data without any metallic components inside the RF coil or magnet room. Therefore, this device is completely MRI-compatible. This device can be constructed with easily available and affordable parts. Although this device does not have the multiaxial capabilities of fiber optic force sensors, it is much cheaper to build and works with commonly used data acquisition systems.Acknowledgements
MRI scans were taken at the Beckman Institute in Urbana, IL.References
1. Liu JZ, Dai TH, Elster TH, et al. Simultaneous measurement of human joint force, surface electromyograms, and functional MRI-measured brain activation. J Neurosci Methods. 2000;101(1):49-57
2. Wigmore DM, Damon BM, Pober DM, et al. MRI measures of perfusion-related changes in human skeletal muscle during progressive contractions. J Appl Physiol. 2004;97(6):2385-2394.
3. Luetkemeyer CM, Ulrich S, Estrada JB, et al. Constitutive modeling of the anterior cruciate ligament bundles and patellar tendon with full-field methods. J Mech Phys Solids. 2021;156:104577.
4. Su H, Iordachita II, Tokuda J, et al. Fiber-optic force sensors for MRI-guided interventions and rehabilitation: a review. IEEE Sensors Journal. 2017;17(7):1952-1963.
5. Tan UX, Yang B, Gullapalli R, et al. Triaxial MRI-compatible fiber-optic force sensor. IEEE Transactions on Robotics. 2011;27(1):65-74.
6. BioRender.com
Figures