1210
Enhanced motion artifact simulator for structural MRI with MP-RAGE sequence1Centre for Medical Image Computing & Department of Computer Science, University College London, London, United Kingdom, 2Medical Physics and Biomedical Engineering, University College London Hospitals, London, United Kingdom, 3Department of Brain Repair and Rehabilitation, UCL Queen Square Institute of Neurology, University College London, London, United Kingdom
Synopsis
Keywords: Analysis/Processing, Simulations, Motion artifacts
Motivation: Motion compromises the utility of structural MRI with MP-RAGE sequence, a workhorse of quantitative neuroimaging research. Recent interest in deep learning-based mitigating solutions, and the scarcity of motion-corrupted data, motivates the need for realistic data simulation. Unfortunately, existing open-source simulators fail to consider important features in real-world acquisitions, including variations in phase-encoding direction, multi-coil acquisition and GRAPPA parallel imaging, resulting in less realistic simulations.
Goal(s): We aim to develop a more realistic motion artifact simulator for MP-RAGE structural MRI.
Approach: We extend TorchIO, an existing simulation framework, to support aforementioned features.
Results: The comparison between simulations demonstrated the importance of including these features.
Impact: The proposed simulation framework can be used to generate more realistic motion-corrupted MRI data from clean images. These data can be served as training sets for deep learning algorithms in motion artifact related applications.
Introduction
Patient movement during MRI scans introduce artifacts, leading to a risk of bias in downstream analysis1,2. Deep learning has been used for enhancing algorithm performance on data with artifacts3 as well as for motion artifacts detections4 and corrections5,6. Such algorithms require large amount of motion-corrupted data for training, that is challenging to collect. Consequently, data simulation is a common alternative. An open-source simulator that are commonly used for data augmentation9,10 or synthetic data simulation11,12 is introduced in TorchIO8, a medical image processing library. Unfortunately, important features in real-world acquisitions such as variations in phase-encoding direction, multi-coil acquisition and GRAPPA13 parallel imaging are not considered in this tool, resulting in less realistic simulations.Methods
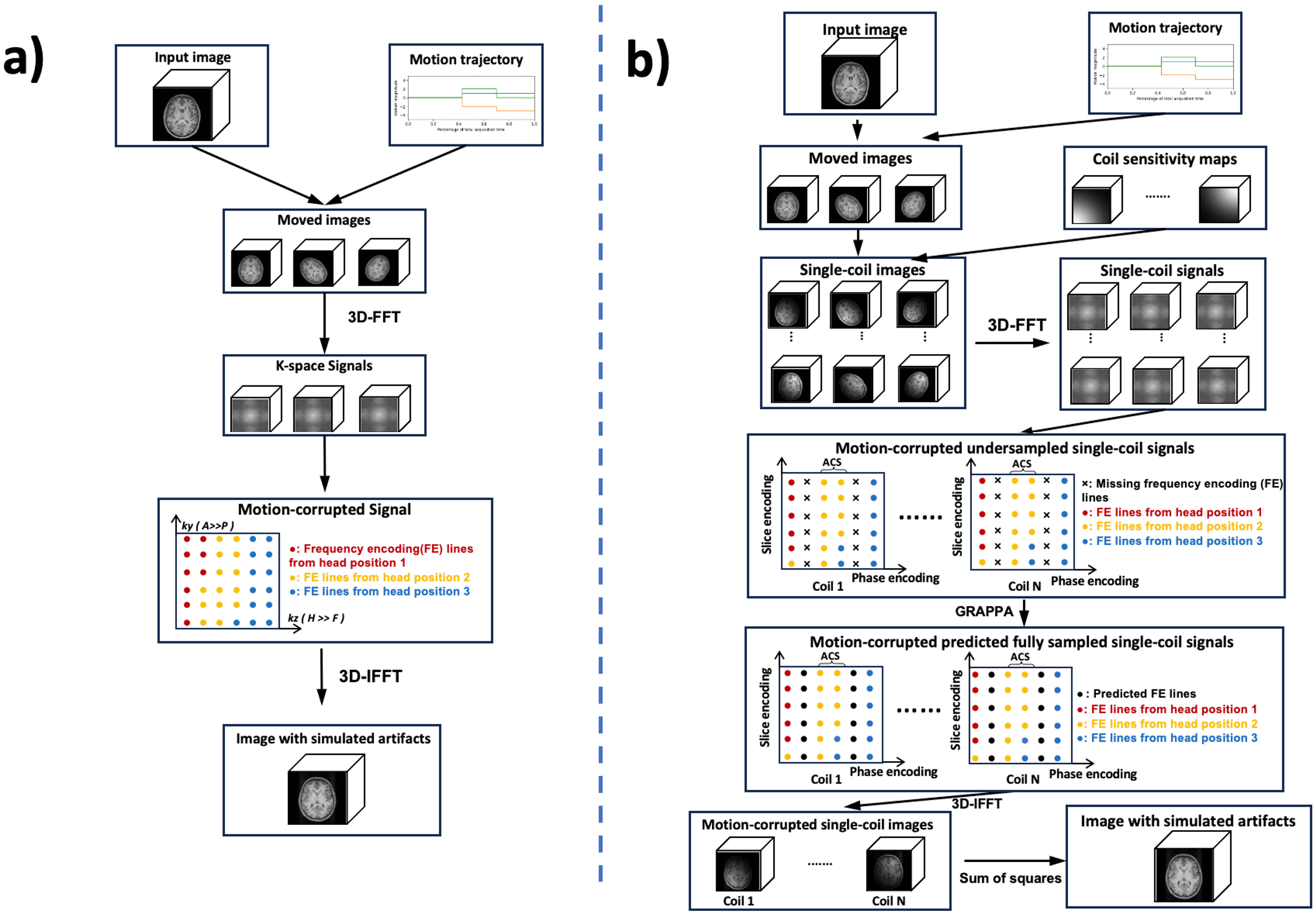
Simulation frameworksThe framework used in TorchIO is shown in Figure 1a. A motion trajectory is simulated randomly with designated number of movements, maximum amount of translation and rotation for each motion, which determines the head's position when each partition of the k-space is acquired. Motions are applied using affine transformations. 3D-FFT is used to simulate k-space signals. The motion-corrupted signal is formed by combining signals based on when the motion happens as introduced in motion trajectory. The effects of motion to each individual frequency encoding lines are neglected. It assumes the phase-encoding direction to be Head-to-Foot and the k-space are fully sampled using single coil.
Our enhanced framework is shown in Figure 1b. The same strategy for simulating motion trajectory is used. After creating the moved images, coil sensitivity maps are multiplied to each of the moved images for estimating single-coil images. To simulate the acquisition of k-space signal for each coil with parallel imaging, 3DFFT is applied, followed by an under-sampling based on acceleration factor and number of Auto-calibration Signals (ACS). For each coil, motion-corrupted signal is formed by combining signals from moved images based on motion trajectory and the choice of phase-encoding direction. To predict missing signals for each coil, GRAPPA is used (using pygrappa14). 3D-IFFT is then applied to get single-coil images. Sum of squares15 is then used for combining them into one image.
Experiments
The motion-free image is chosen from the MR-ART16 dataset as this study scan the same subject with and without motion. This enables comparisons of simulations and real scans.
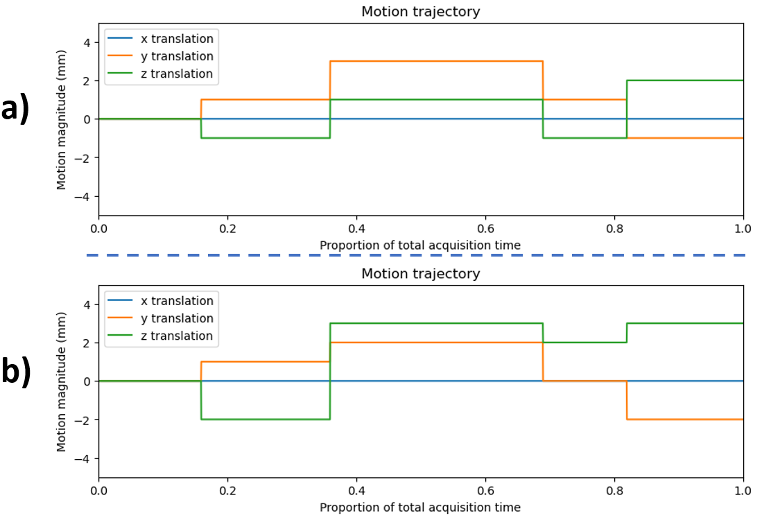
Simulation using TorchIO’s framework but with different phase-encoding direction are compared. The possible PE direction includes Head-Foot (H>>F) (TorchIO’s case), Left-Right (L>>R), and Anterior-Posterior (A>>P). Motion trajectory in Figure 2a is used.
Effects of multi-coil are assessed using simulated coil sensitivity maps by assuming one coil per corner of the image (resulting 8 coils). The sensitivity of a coil at a voxel with distance $$$d$$$ from it is defined using a Gaussian function $$$ e^{-(d^2/(2c^2))}$$$ with $$$c=0.3$$$. Simulations with and without multi-coil effects are compared using trajectory (a) and phase-encoding direction is A>>P.
For simulation with GRAPPA, the acceleration factor is 2, number of ACS is 24 and phase-encoding direction is A>>P. Since GRAPPA requires multi-coil acquisition, we modified TorchIO's framework to with additional multi-coil effect using aforementioned coil sensitivity map for simulation without GRAPPA for fair comparison.
Results & Discussion
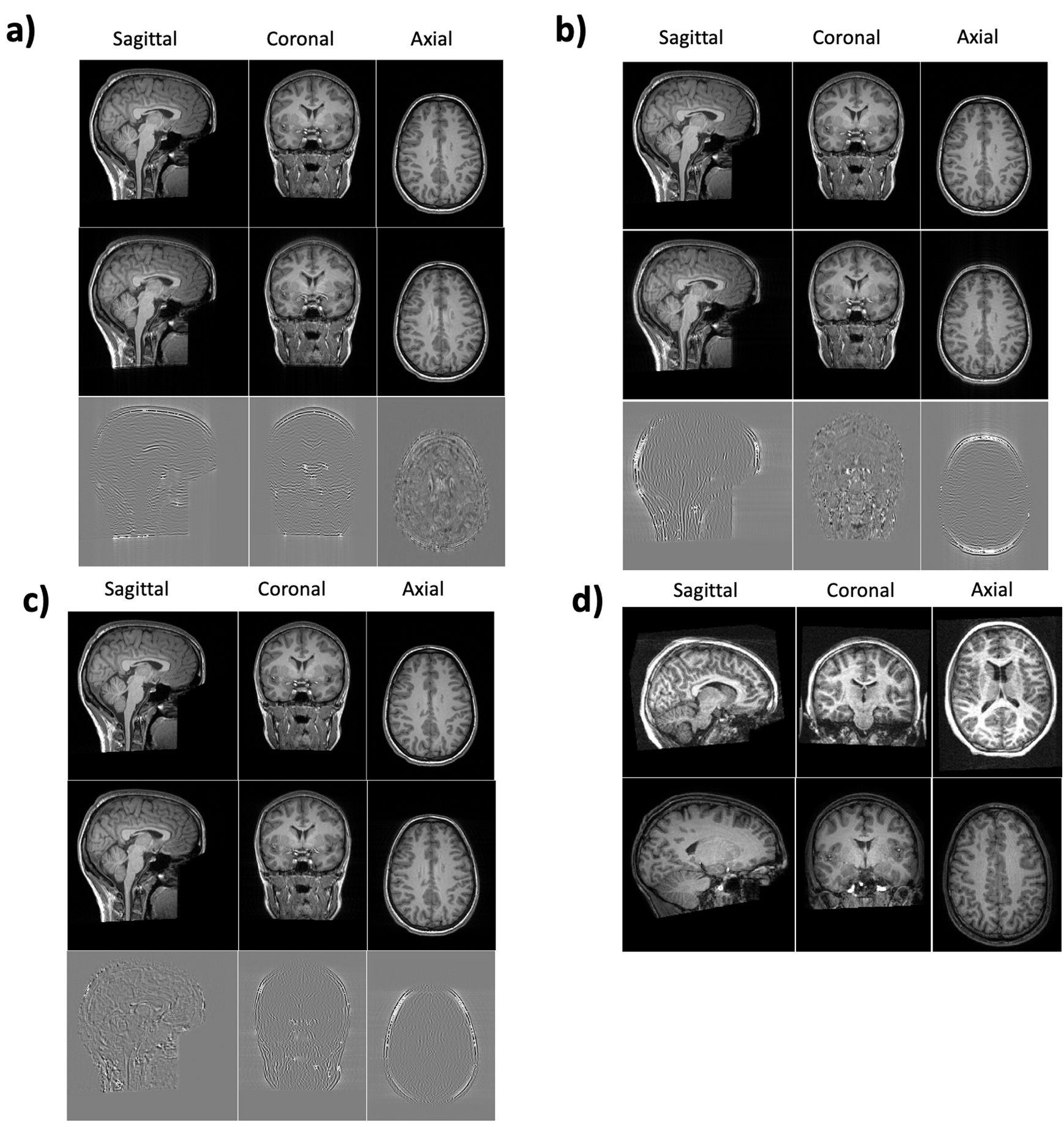
Effect of phase-encoding directionThe simulation results and the difference maps to the motion-free images are shown in Figure 3(a-c). The artifacts consistently appear as ghosting along phase-encoding direction as expected17. Figure 3d shows real examples from ABIDE18 dataset with artifacts along different directions.
Effect of multi-coil
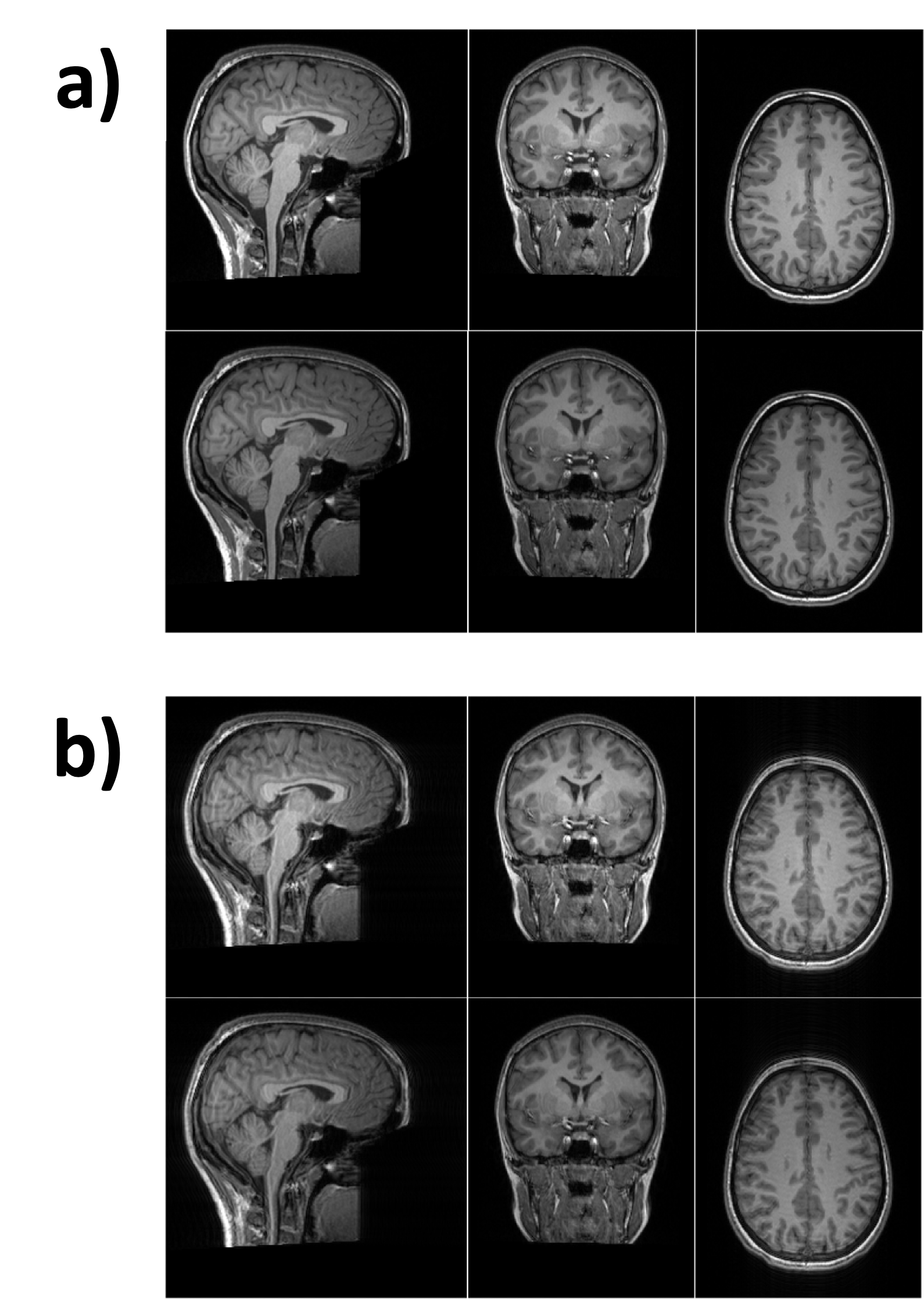
In Figure 4, the central region of the image appears darker comparing to the original image. This is likely due to weaker signals from the center of the object for each coil, leading to spatial non-uniformity in the image. The pattern of the motion artifacts are not affected by multi-coil acquisition as shown is Figure 4b.
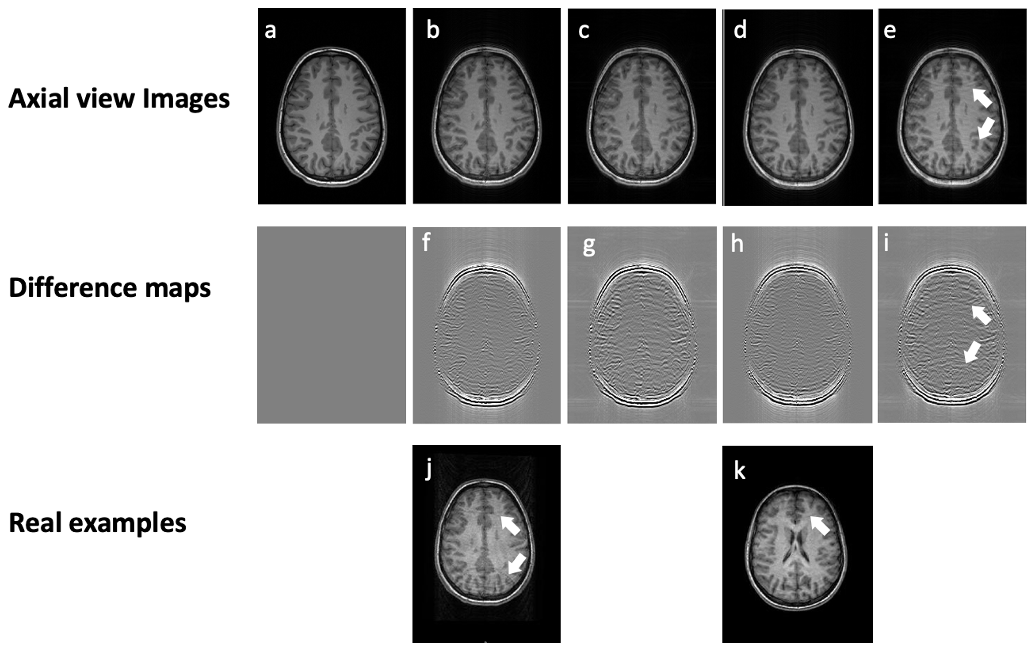
Effect of GRAPPA
By comparing (b) to (c) and (d) to (e) in Figure 5, it suggests that the use of GRAPPA leads to more siginificant artifacts. Additional aliasing shows up in the case where the second trajectory (more motion) and GRAPPA are used. This matches the real acquisition of the same subject using GRAPPA under significant motion (Figure 5j). Motion introduces error to the prediction of under-sampled signals, leading to aliasing. TorchIO assumes fully sampled acquisition, therefore, no such aliasing appears.
Conclusion
We demonstrated that by incorporating the choice of phase encoding direction, multi-coil acquisition and GRAPPA parallel imaging into the simulation framework, more realistic motion artifacts can be simulated. Using this framework can creates realistic simulated dataset for training deep learning algorithms in motion artifact related applications.Acknowledgements
This work is supported by the EPSRC-funded UCL Centre for Doctoral Training in Intelligent, Integrated Imaging in Healthcare (i4health) [EP/S021930/1]References
1. Alexander-Bloch A., et al., “Subtle in-scanner motion biases automated measurement of brain anatomy from in vivo MRI”, Hum Brain Mapp. 2016 Jul;37(7):2385-97.
2. Reuter M., et al., “Head motion during MRI acquisition reduces gray matter volume and thickness estimates”, Neuroimage. 2015 Feb 15;107:107-115.
3. Shaw, R., et al., “MRI k-Space Motion Artefact Augmentation: Model Robustness and Task-Specific Uncertainty”, 2019 International Conference on Medical Imaging with Deep Learning, pp. 427-436.
4. Meding K., et al., “Automatic detection of motion artifacts in MR images using CNNS”, 2017 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP). IEEE.
5. Liu J., et al. “Motion artifacts reduction in brain MRI by means of a deep residual network with densely connected multi-resolution blocks (DRN-DCMB)”, Magn Reson Imaging. 2020 Sep;71:69-79.
6. Duffy BA., et al., “Retrospective motion artifact correction of structural MRI images using deep learning improves the quality of cortical surface reconstructions”, Neuroimage. 2021 Apr 15;230:117756.
7. Pawar K, et al., “Suppressing motion artefacts in MRI using an Inception-ResNet network with motion simulation augmentation”, NMR Biomed. 2022 Apr;35(4):e4225.
8. Pérez-García, F., et al., “TorchIO: a Python library for efficient loading, preprocessing, augmentation and patch-based sampling of medical images in deep learning”, Computer Methods and Programs in Biomedicine, 208, 106236.
9. Chatterjee, S., et al., “Classification of brain tumours in MR images using deep spatiospatial models”, Scientific Reports, 12(1), 1505.
10. Chartrand, G., at al., “Automated Detection of Brain Metastases on T1‐Weighted MRI Using a Convolutional Neural Network: Impact of Volume Aware Loss and Sampling Strategy”, Journal of Magnetic Resonance Imaging, 56(6), 1885-1898.
11. Butskova, A., et al., “Adversarial bayesian optimization for quantifying motion artifact within mri”, Predictive Intelligence in Medicine. PRIME 2021. Lecture Notes in Computer Science(), vol 12928.
12. Loizillon, S., et al., “Transfer learning from synthetic to routine clinical data for motion artefact detection in brain T1-weighted MRI”, Medical Imaging 2023: Image Processing (Vol. 12464, pp. 335-341).
12. Griswold MA., et al., “Generalized autocalibrating partially parallel acquisitions (GRAPPA)”, Magn Reson Med. 2002 Jun;47(6):1202-10.
14. pygrappa. https://github.com/mckib2/pygrappa
15. Roemer PB., et al., “The NMR phased array”, Magn Reson Med. 1990 Nov;16(2):192-225.
16. Nárai, Á., et al., “Movement-related artefacts (MR-ART) dataset of matched motion-corrupted and clean structural MRI brain scans”, Scientific Data, 2022 9(1), 630.
17. Wood, M. L., et al., “MR image artifacts from periodic motion”, Medical physics, 12(2), 143-151.
18. Di Martino A, et al., “The autism brain imaging data exchange: Towards a large-scale evaluation of the intrinsic brain architecture in autism”, Mol Psychiatry 2014, 19: 659–667.
Figures