1078
Subspace dual-domain-loss for self-supervised deep learning reconstruction of dynamic MRI: Method and Application to CMR Multitasking1Biomedical Imaging Research Institute, Cedars-Sinai Medical Center, Los Angeles, CA, United States, 2Department of Radiological Sciences, David Geffen School of Medicine at UCLA, Los Angeles, CA, United States, 3Department of Bioengineering, UCLA, Los Angeles, CA, United States
Synopsis
Keywords: Machine Learning/Artificial Intelligence, Image Reconstruction, self-supervised learning, subspace, dynamic MRI
Motivation: Supervised deep learning (DL) can reduce reconstruction time for CMR Multitasking, but the lack of ground truth limits the quality of supervised DL to that of iteratively reconstructed labels.
Goal(s): Our goal was to develop a self-supervised learning (SSL) reconstruction method, whose performance is not limited by the iterative reconstruction.
Approach: We developed a dual-domain subspace SSL reconstruction method for non-Cartesian dynamic MRI, applying it to CMR Multitasking.
Results: The proposed method can perform image reconstruction without reference images and shows better interscan consistency than supervised DL.
Impact: With the proposed method, image quality of DL reconstruction for CMR Multitasking can potentially surpass iterative reconstruction. We applied subspace constraints to SSL reconstruction, showing an efficient way to relieve the computational burden of dynamic MRI SSL reconstruction.
Introduction
CMR Multitasking is a promising approach for quantitative imaging without breath-holds or ECG monitoring1, but slow iterative non-Cartesian reconstruction is a barrier to clinical adoption. Supervised deep learning (DL)2 achieves clinically practical reconstruction times, but the lack of ground truth for highly undersampled multitasking images limits the quality of supervised DL to that of iteratively reconstructed labels.Recently, self-supervised learning (SSL) has become promising for MR reconstruction3,4 when ground truth data are limited or unavailable, but SSL work for non-Cartesian dynamic MRI has been limited by computational constraints5. Multitasking and several other dynamic and multicontrast MRI frameworks6,7 have adopted subspace constraints not just for image modeling but also for controlling computational cost. Here we extend this idea to SSL reconstruction, proposing a dual-domain subspace SSL reconstruction method for non-Cartesian dynamic MRI, applying it to CMR multitasking to improve interscan consistency in lieu of a ground truth.
Methods
Acquisition and datasetsWe collected 128 T1 CMR Multitasking8 datasets on three Siemens 3T scanners, with a 96/12/20 training/validation/testing allocation. Spatial resolution was 1.7x1.7mm2, matrix size of the spatial factor $$$U$$$ was 320×320×32, and scan time was 60sec.
Training structure and loss
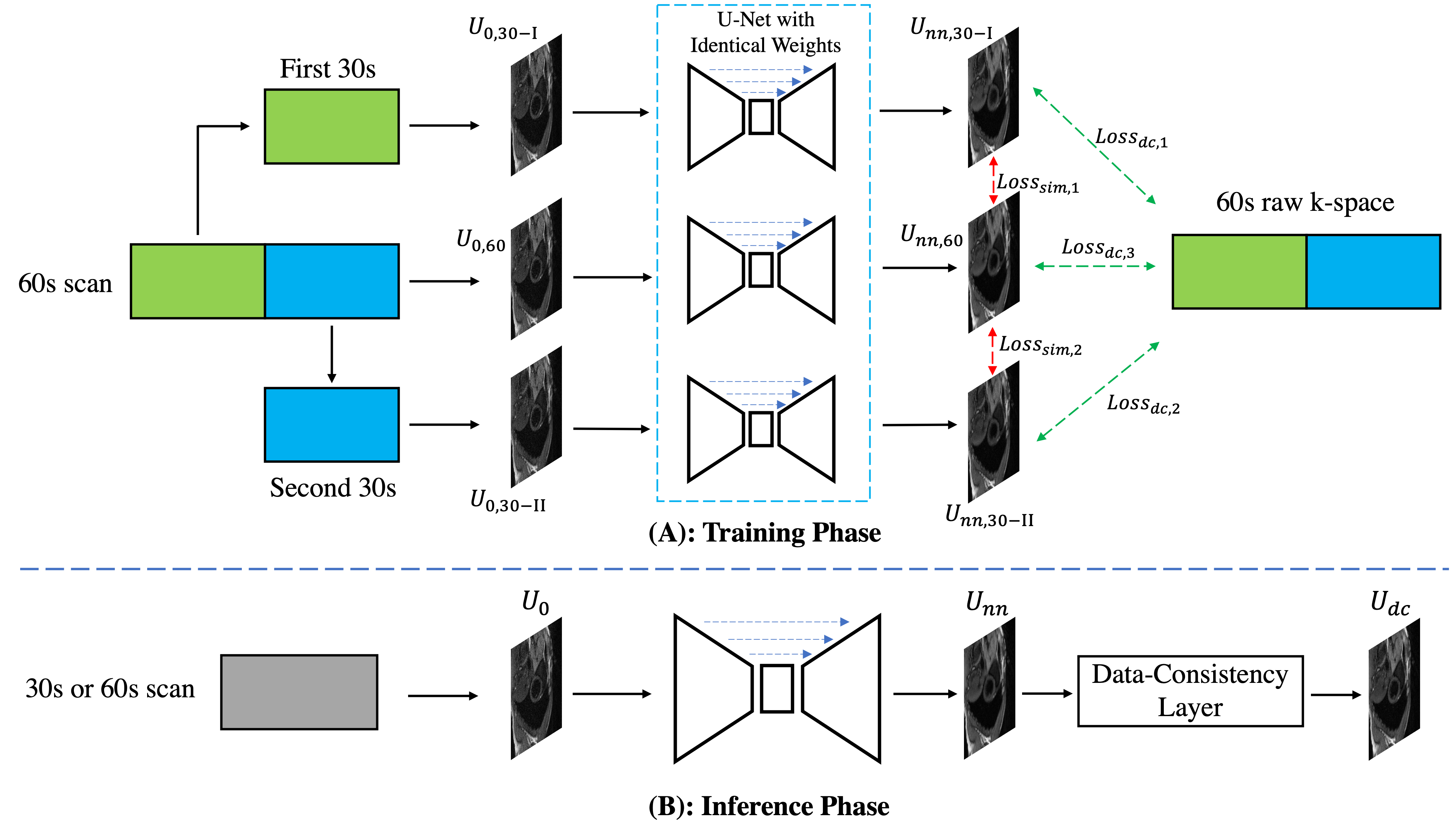
Our proposed SSL method split each 60sec scan into two 30sec halves (30-I and 30-II). Training aimed to promote data and image consistency between the network outputs of 30-I/30-II and the 60sec scan (Fig. 1A). Specifically, the zero-filled spatial factor $$$U_0$$$ for the 30-I, 30-II, and 60sec scans were each fed into U-Nets with identical weights (detailed structure in2), producing three output spatial factors $$$U_{nn,30-\mathrm{I}}$$$, $$$U_{nn,30-\mathrm{II}}$$$ and $$$U_{nn,60}$$$. Temporal factors were calculated from the 60sec scan to ensure a common temporal subspace/coordinate system for the three spatial factors.
Our dual-domain loss function comprised k-space data-consistency (DC) loss $$$Loss_{dc}$$$ and image domain similarity loss $$$Loss_{sim}$$$, both calculated in-subspace for computational efficiency.
DC loss
$$$Loss_{dc}$$$ sums the squared L2 k-space data consistency loss between each of the three outputs and the 60sec raw k-space data, encouraging all the reconstructions to align with the acquired raw k-space data:
$$Loss_{dc}=\sum_{i=1}^{3}Loss_{dc,i}$$
$$Loss_{dc,i}=\left\|A(U_{nn,i})-b\right\|_2^2=Tr(U^H_{nn,i}A^*A(U_{nn,i})-2U^H_{nn,i}A^*(b))+b^Hb$$
for acquired k-space $$$b$$$ and encoding operator $$$A$$$.2
Image similarity loss
$$$Loss_{sim}$$$ sums the squared L2 image loss between each 30sec output and the 60sec output, under the rationale that the more highly undersampled 30sec spatial factors should resemble the 60sec spatial factor:
$$Loss_{sim}=Loss_{sim,1}+Loss_{sim,2}=\left\|U_{nn,30-\mathrm{I}}-U_{nn,60}\right\|_2^2+\left\|U_{nn,30-\mathrm{II}}-U_{nn,60}\right\|_2^2$$
Total loss combined DC and similarity losses:
$$Loss=Loss_{sim}+\lambda Loss_{dc}$$
with $$$\lambda=50$$$ set by inspection.
Inference
During inference (Figure 1B), the U-Net and a DC layer2 received either 30-I, 30-II, or 60sec inputs.
Evaluation methods
We compared SSL to a supervised DL reconstruction network trained to minimize L2 loss between the U-Net output and a conventional iterative reconstruction2. The supervised DL network output was also passed through a DC layer during inference.
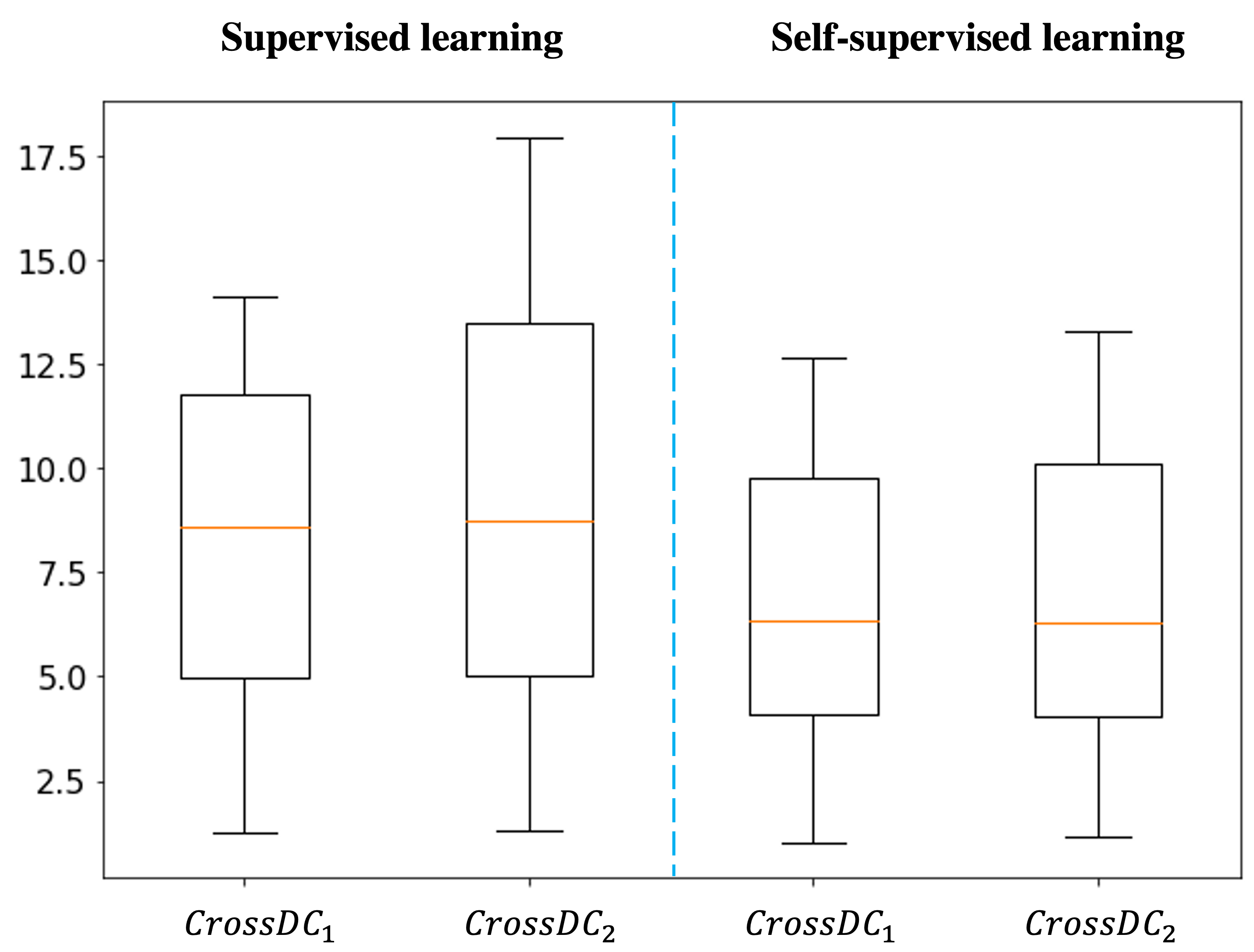
In the absence of a ground truth, we evaluated cross-scan data consistency (CrossDC), to evaluate how well the reconstructed spatial factor from one 30sec half of the scan could predict data from the other 30sec half of the scan:
$$CrossDC=\frac{1}{2}(CrossDC_1+CrossDC_2)=\frac{1}{2}(\left\|A_\mathrm{I}(U_{nn,30-\mathrm{II}})-b_\mathrm{I}\right\|_2^2+\left\|A_\mathrm{II}(U_{nn,30-\mathrm{I}})-b_\mathrm{II}\right\|_2^2)$$
Where $$$A_\mathrm{I}$$$ and $$$b_\mathrm{I}$$$ correspond to the first 30sec scan and $$$A_\mathrm{II}$$$ and $$$b_\mathrm{II}$$$ correspond to the second 30sec scan.
Cross-DC metrics in the testing set were calculated for both the SSL and supervised learning methods.
Results
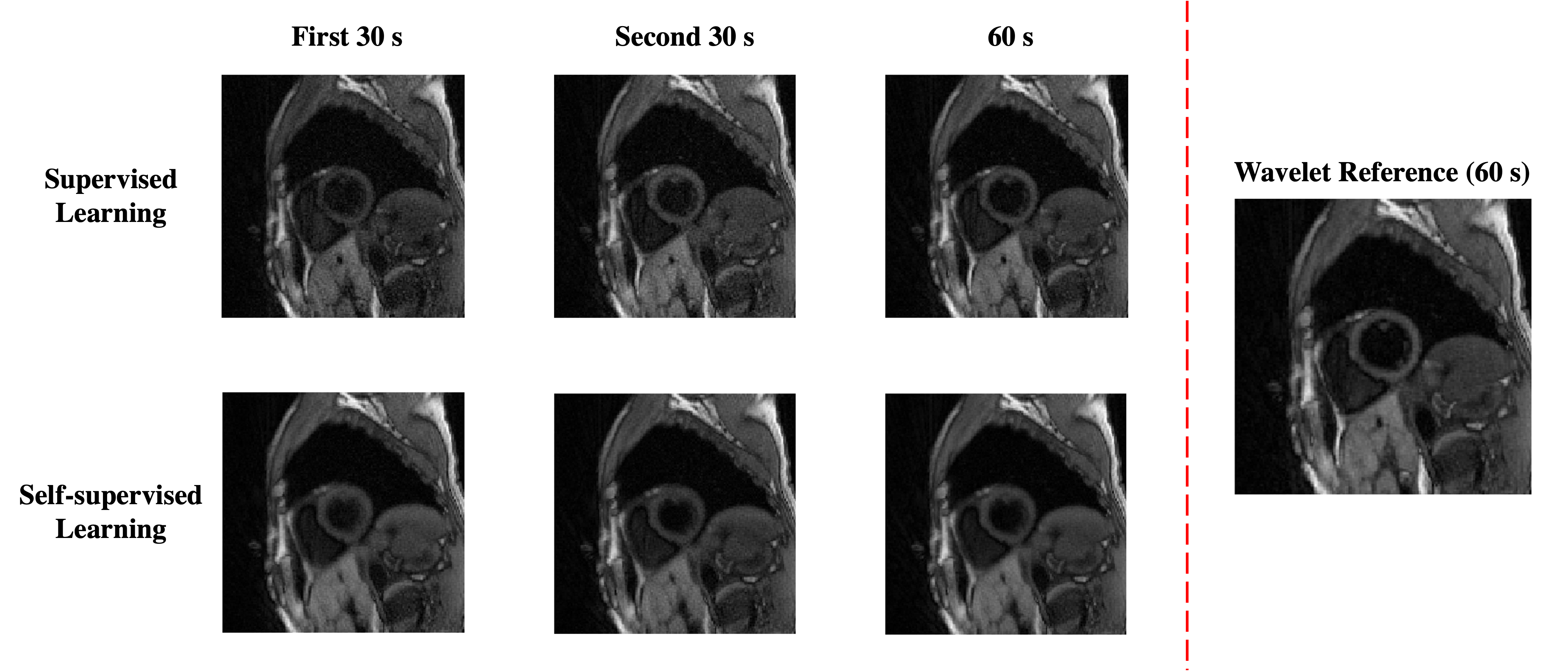
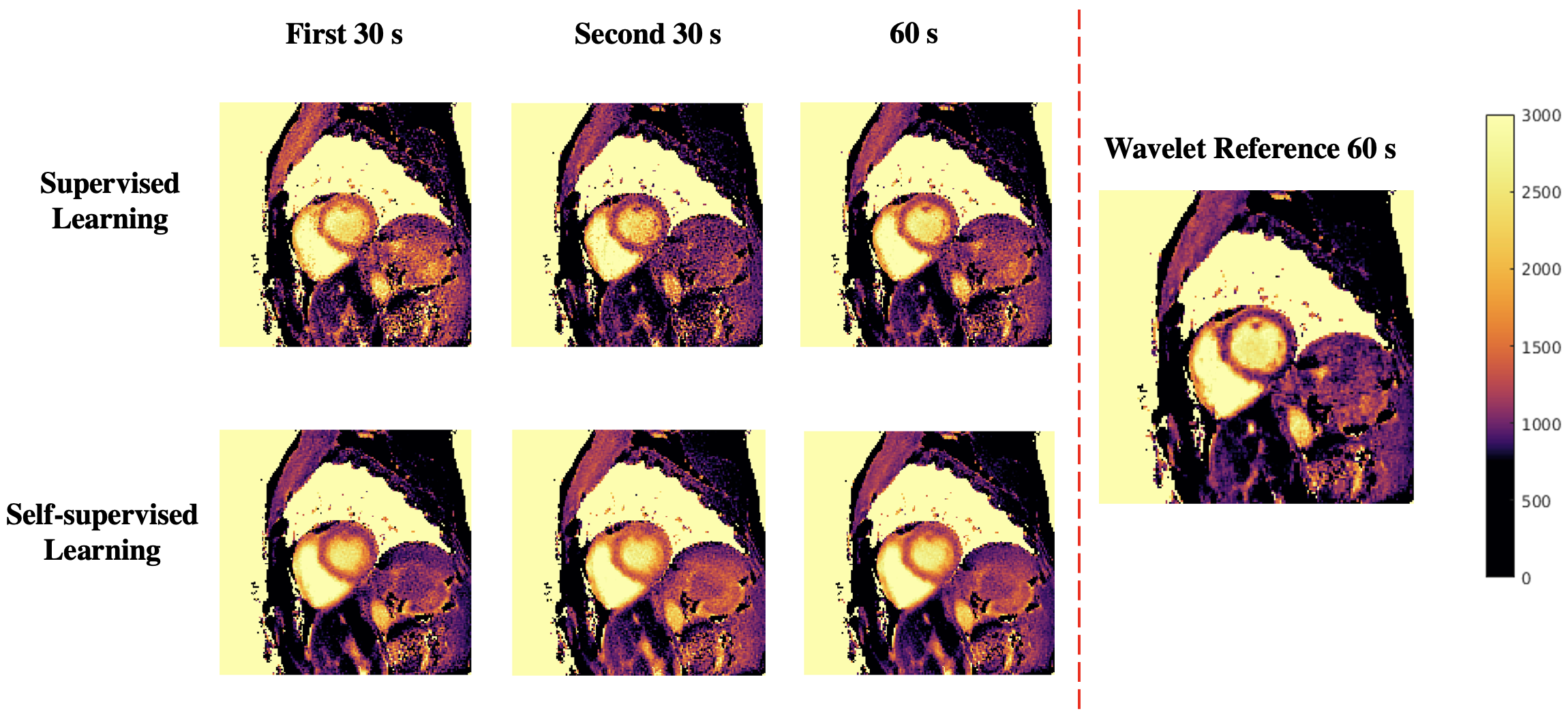
Figure 2 shows the box plot of cross-DC metrics for supervised learning and SSL reconstruction methods. Cross-DC of the proposed SSL method (median=6.3) was significantly lower (p<0.001, Wilcoxon signed-rank test) than cross-DC of supervised learning (median=8.7). Figures 3 and 4 show reconstructed images and T1 maps, respectively. SSL images/maps have less noise, although supervised learning images/maps are sharper.Discussion
The proposed SSL method successfully reconstructed images and T1 maps without labels. It achieved better cross-DC values than supervised learning, indicating a better ability to predict the other half of k-space data held out during inference. Image sharpness of the SSL method may be impacted by the equal weights of 30sec k-space data in $$$Loss_{dc}$$$, which potentially have an averaging effect. Future work should address SSL sharpness, e.g. by finetuning the loss function and/or adding more CNN+DC iterations, and should investigate whether the better interscan consistency of SSL translates to more repeatable quantification.Conclusion
We developed a subspace dual-domain-loss SSL reconstruction method for non-Cartesian dynamic MRI and applied it to CMR Multitasking. It performs image reconstruction without reference images and shows better interscan consistency than previous supervised DL method.Acknowledgements
This work was partially supported by NIH R01 EB028146.References
1. Christodoulou AG, Shaw JL, Nguyen C, et al. Magnetic resonance multitasking for motion-resolved quantitative cardiovascular imaging. Nature Biomed Eng. 2018;2(4):215-226.
2. Chen Z, Chen Y, Xie Y, Li D, Christodoulou AG. Data-Consistent non-Cartesian deep subspace learning for efficient dynamic MR image reconstruction. 2022 IEEE 19th International Symposium on Biomedical Imaging (ISBI). 2022:1-5.
3. Yaman B, Hosseini SAH, Moeller S, Ellermann J, Uğurbil K, Akçakaya M. Self-supervised learning of physics-guided reconstruction neural networks without fully sampled reference data. Magnetic Resonance in Medicine. 2020;84(6):3172-3191. doi:https://doi.org/10.1002/mrm.28378
4. Zhou B, Schlemper J, Dey N, et al. Dual-domain self-supervised learning for accelerated non-Cartesian MRI reconstruction. Medical Image Analysis. 2022;81:102538.
5. Miller Z, Johnson KM. Motion compensated self supervised deep learning for highly accelerated 3D ultrashort Echo time pulmonary MRI. Magnetic Resonance in Medicine. 2023;89(6):2361-2375.
6. Zhao B, Setsompop K, Adalsteinsson E, et al. Improved magnetic resonance fingerprinting reconstruction with low-rank and subspace modeling. Magn Reson Med. 2018;79(2):933-942.
7. Ong F, Zhu X, Cheng JY, et al. Extreme MRI: Large‐scale volumetric dynamic imaging from continuous non‐gated acquisitions. Magnetic resonance in medicine. 2020;84(4):1763-1780.
8. Shaw JL, Yang Q, Zhou Z, et al. Free-breathing, non-ECG, continuous myocardial T1 mapping with cardiovascular magnetic resonance multitasking. Magn Reson Med. 2019;81(4):2450-2463.
Figures