1065
Implicit Neural Representations of GRAPPA Kernels for Rapid Non-Cartesian and Time-Segmented Reconstructions1Electrical Engineering, Stanford University, Stanford, CA, United States, 2Radiology, Stanford University, Stanford, CA, United States
Synopsis
Keywords: Image Reconstruction, Image Reconstruction
Motivation: Using non-Cartesian trajectories allows for motion robustness, and a more efficient encoding. However, these non-Cartesian acquisitions necessitate the use of NUFFTs and field correction techniques, leading to costly reconstruction times.
Goal(s): We aim to remove the need for NUFFTs in non-Cartesian MRI, and drastically reduce the computational footprint of field correction.
Approach: Our approach is to correct the raw k-space data of phase due to field imperfections and off-grid sampling using an implicit representation of GRAPPA kernels.
Results: We show an order of magnitude increase in comparison to current standard techniques with near identical reconstructions quality.
Impact: This work aims to significantly reduce the computational requirement for reconstructing non-Cartesian data. This will help with the adoption of long readout non-Cartesian acquisitions, which naturally accelerate MRI exams.
Introduction
Rapid imaging applications often require Non-Cartesian trajectories for efficient k-space coverage and motion robustness, but this leads to longer reconstruction times due to the need for Non-Uniform Fast Fourier Transforms[1] (NUFFTs) and field-correction techniques. To remove the need for NUFFTs, GRAPPA Operator Gridding[2] (GROG) has been proposed, which uses GRAPPA[3] kernels to directly estimate nearby Cartesian samples from non-Cartesian data. While promising, it is limited by the use of just a single source non-Cartesian sample to estimate the target Cartesian sample, which can induce significant noise amplification. Field correction techniques, such as time-segmentation[4], attempt to efficiently model the non-Fourier field encoding into the forward model. This however directly increases the required number of FFTs per model evaluation due to the field modeling being in the image domain. SVD-based approaches[4,5] have been proposed to reduce the number of segments, however are often not suitable due to the large computational footprint of the SVD. While using GRAPPA to model these phase imperfections in k-space can fix this issue, it has been under-explored due to the need to estimate various temporally varying kernels. Thus, we develop a k-space approach to grid and removing field-induced phase to achieve an order magnitude gain in reconstruction efficiency while retaining high quality.Theory
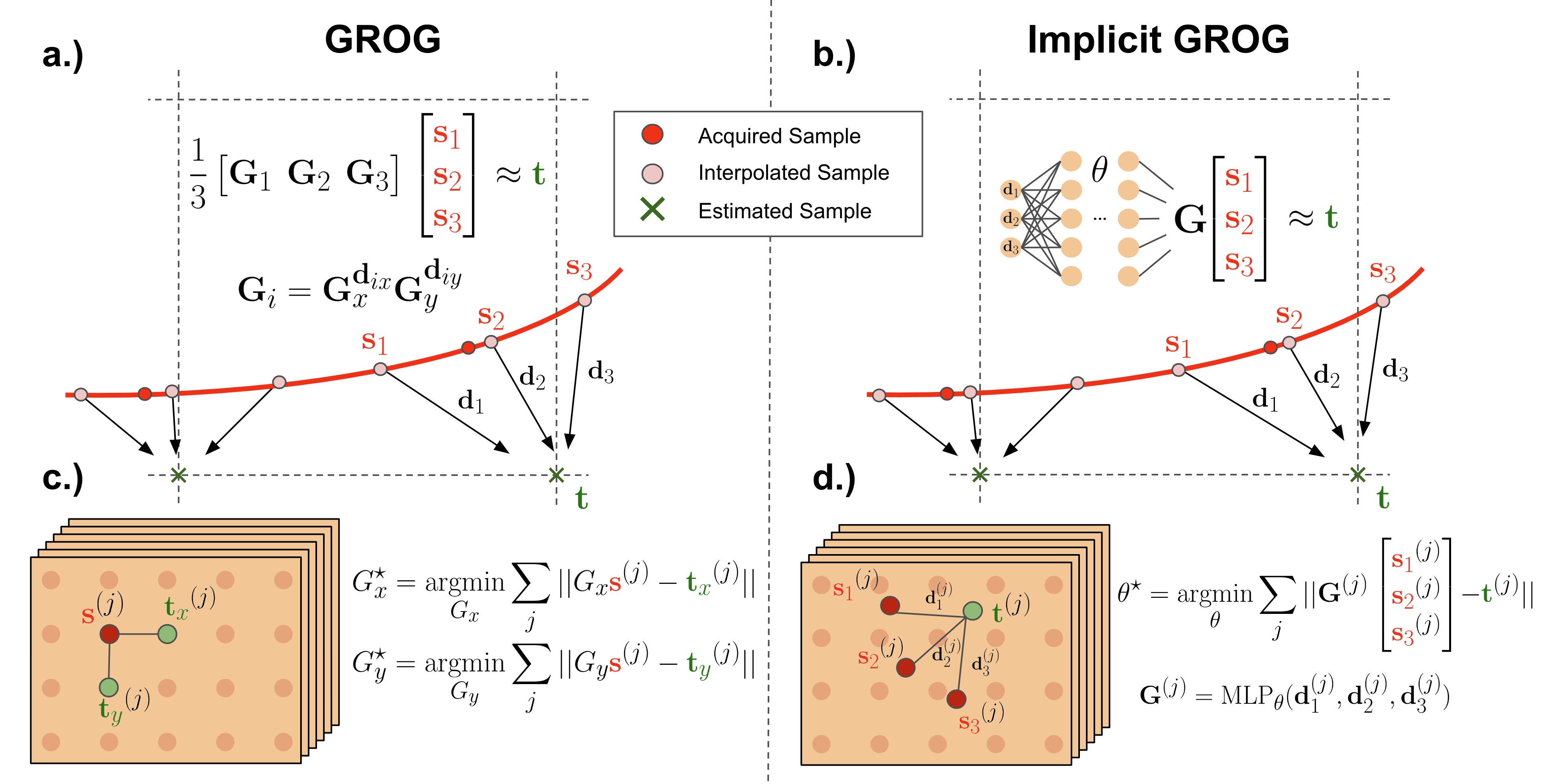
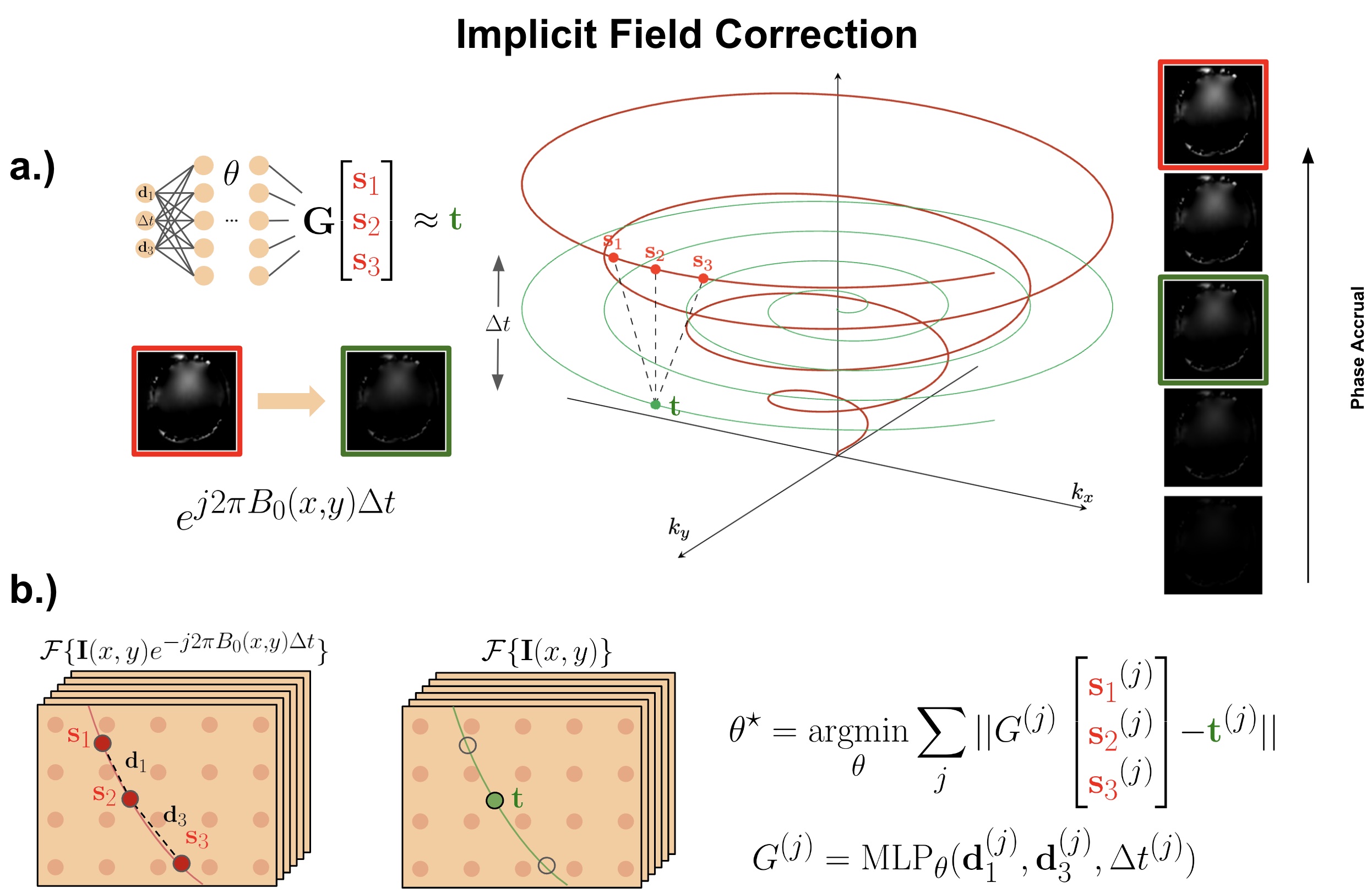
Our goal is to use GRAPPA to directly remove the phase due to field imperfections and off-grid sampling from the raw-data to enable faster reconstructions. Let us consider the non-Cartesian k-space coordinates $$$\vec{k}(\tau)$$$ as a sum of gridded coordinates $$$\vec{g}(\tau)$$$ and deviations from the regular grid $$$\vec{d}(\tau)$$$:$$\vec{k}(\tau)=\vec{g}(\tau)+\vec{d}(\tau)$$With this formulation in mind, the multi-channel signal at the $$$i^{th}$$$ time point data $$$\vec{s}(\tau_i)$$$ in the presence a field imperfection $$$\phi(\vec{r},\tau)$$$ can be written as$$\vec{s}(\tau_i)=\int_\vec{r}\vec{C}(\vec{r})m(\vec{r})e^{-j2\pi{}(\vec{g}(\tau_i)+\vec{d}(\tau_i))\cdot{}\vec{r}}e^{-j2\pi\phi(\vec{r},\tau_i)}d\vec{r}\\\vec{s}(\tau_i)=\int_\vec{r}\vec{C}(\vec{r})m(\vec{r})e^{-j2\pi{}\vec{g}(\tau_i)\cdot{}\vec{r}}e^{-j2\pi\tilde{\phi}(\vec{r}, \tau_i)}d\vec{r}$$Where $$$\tilde{\phi(\vec{r},\tau)}=\vec{d}(\tau)\cdot{}\vec{r}+\phi(\vec{r},\tau)$$$ represents the phase imperfection due to fields and off grid sampling. We propose to use GRAPPA to remove this phase term from the raw data, resulting in the 'clean' target point$$\vec{t}(\tau_i)=\int_\vec{r}\vec{C}(\vec{r})m(\vec{r})e^{-j2\pi{}\vec{g}(\tau_i)\cdot{}\vec{r}}d\vec{r},$$which is possible if we assume that any coil map $$$C_k(\vec{r})$$$ can be modeled as a linear combination of $$$N_\text{source}$$$ coil weighted phase imperfections:$$C_k(\vec{r})\approx\sum_{j=1}^{N_\text{coil}}\sum_{l=-N_\text{source}/2}^{N_\text{source}/2}g_{ljk}(\tau_i)C_j(\vec{r})e^{-j2\pi\tilde{\phi}{}(\vec{r},\tau_{i+l})},$$and hence the GRAPPA relationship in Figures 1 and 2 holds. Image reconstruction using $$$\vec{t}(\tau)$$$, which lies on a cartesian grid, requires no NUFFTs or time-segments. Critically, the GRAPPA weights $$$g_{ljk}(\tau_i)$$$ must be trained for every time sample $$$\tau_i$$$, which naively becomes extremely computationally demanding. Fortunately, these kernels are correlated, and we can instead efficiently train on a compressed representation using an implicit neural network[6,7], as shown in Figures 1 and 2.Methods
Implicit GROGOur gridding technique differs from GROG by allowing multiple non-Cartesian samples (enabled by the implicit network) to be used in estimating every cartesian sample, and thereby markedly improving the conditioning of such interpolation (Figure 1). We use a multilayer perceptron (MLP) architecture with 4 hidden layers of size 256. This MLP is stochastically trained using an ADAM optimizer to minimize the $$$\ell_1$$$ loss over randomized source and target points chosen from the low-resolution calibration dataset, which usually takes roughly 30 seconds.
Implicit Field Correction
We use a similar MLP architecture to represent the vast amount of GRAPPA kernels needed to model the field induced phases as shown in Figure 2. The model architecture and training procedure is kept consistent with the gridding network, and only differs by the phases modeled in the calibration.
Reconstruction Details
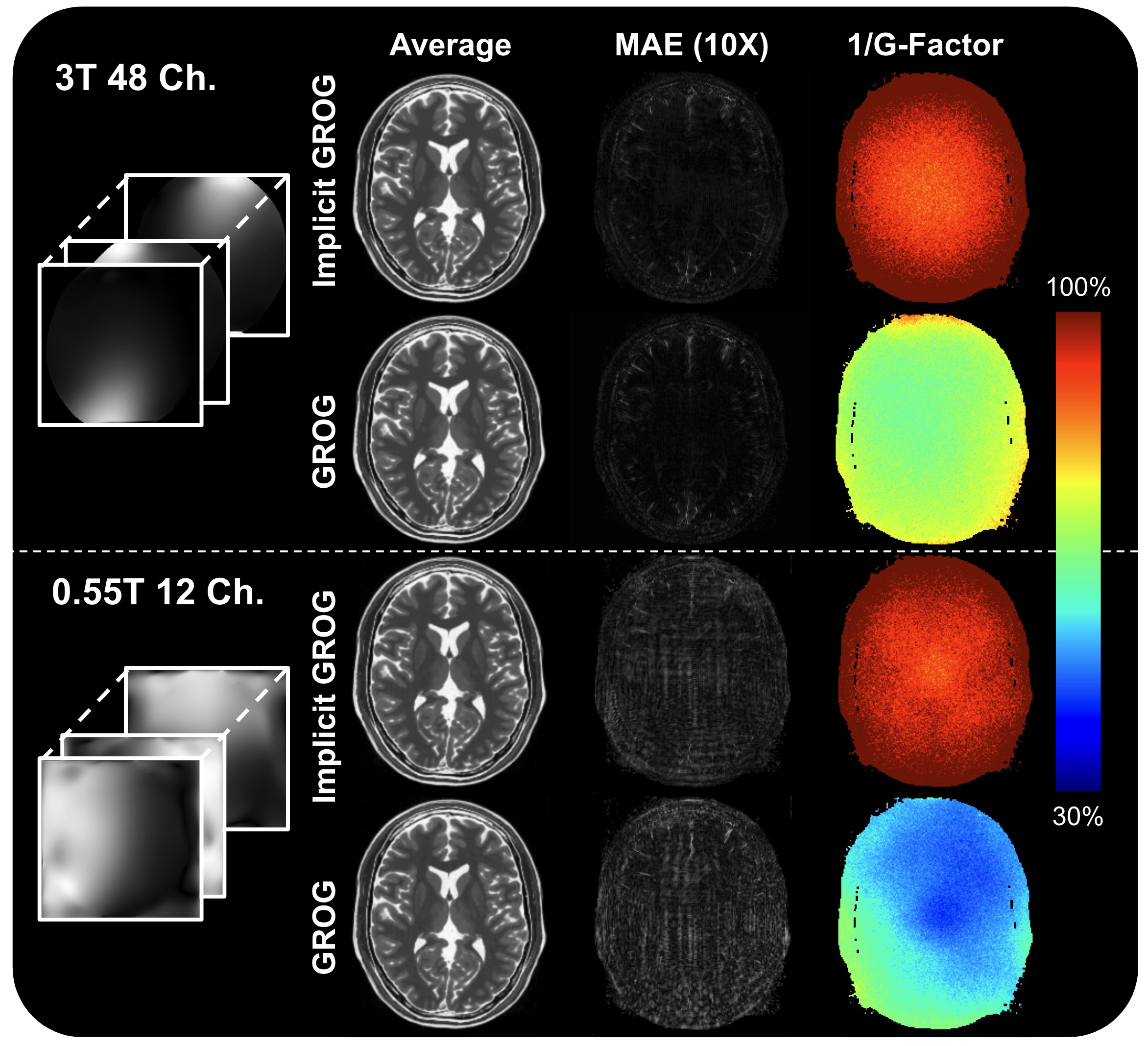
CG-SENSE reconstructions are performed in PyTorch using the torchkbnufft library[8]. The Toeplitz method[4] has been extended to subspace, time-segmented, and gridded reconstructions and is thereby used in all examples. The pseudo-replica method[9] is used to simulate G-factor and artifact maps for non-Cartesian SENSE[10] reconstructions.
Results and Discussion
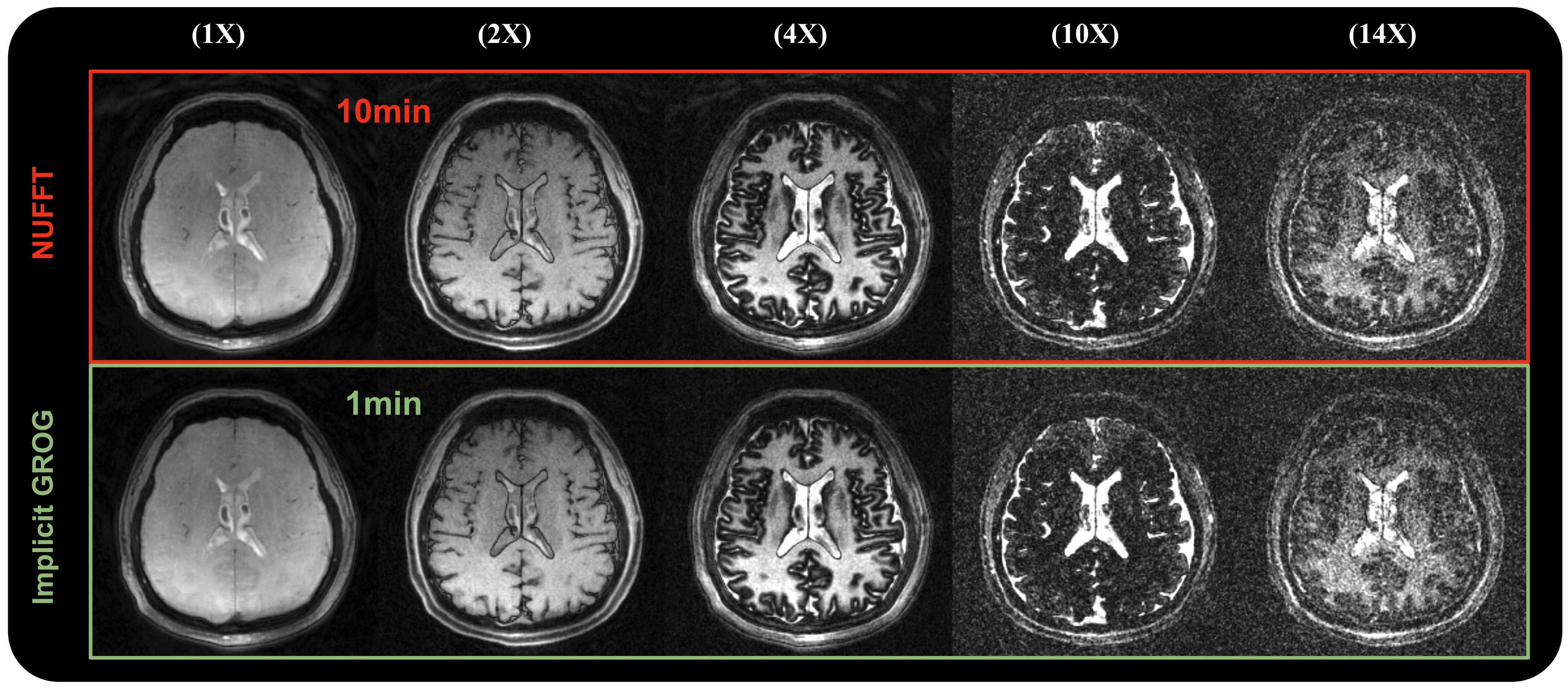
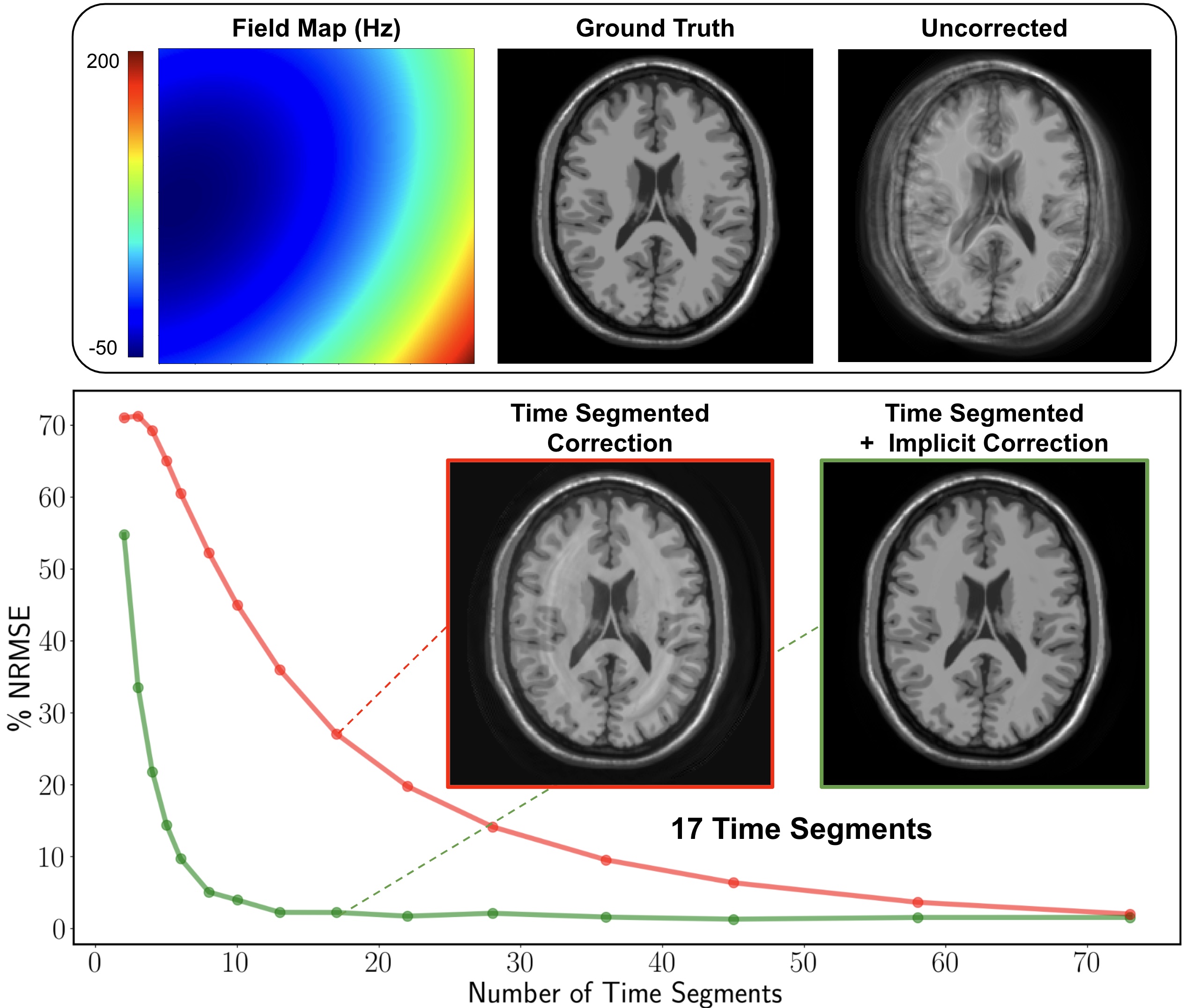
The main advantage to using implicit GROG over GROG is the ability to use multiple non-Cartesian samples, which is shown to be more noise-resilient than GROG (Figure 3). While these techniques can work with any reconstruction pipeline, we show an in-vivo 1mm whole-brain MRF-subspace[11] reconstruction (Figure 4), as this provides a realistic case for burdensome reconstruction times. We achieve a 10X speedup with only negligible artifacts due to using a gridded trajectory. Using a smooth B0 map, we show that partial field correction can be applied to the raw long readout spiral k-space data to reduce the number of segments needed for reconstruction by 4X, while retaining a similar RMSE (Figure 5).Conclusion
Future work will explore the use of this approach for reconstruction of data acquired in the presence of additional field imperfections, such as concomitant, eddy current, and Skope-measured fields. In these cases, field imperfections are spatially smooth, and large time-segmentation reduction is expected to be possible, leading to large gains in reconstruction.Acknowledgements
This work was supported by the National Institutes of Health under grants R01MH116173, R01EB019437, U01EB025162, P41EB030006, R01EB033206, and U24NS129893.
References
[1] Fessler, Jeffrey A., and Bradley P. Sutton. "Nonuniform fast Fourier transforms using min-max interpolation." IEEE transactions on signal processing 51.2 (2003): 560-574.
[2] Seiberlich, Nicole, et al. "Non‐Cartesian data reconstruction using GRAPPA operator gridding (GROG)." Magnetic Resonance in Medicine: An Official Journal of the International Society for Magnetic Resonance in Medicine 58.6 (2007): 1257-1265.
[3] Griswold, Mark A., et al. "Generalized autocalibrating partially parallel acquisitions (GRAPPA)." Magnetic Resonance in Medicine: An Official Journal of the International Society for Magnetic Resonance in Medicine 47.6 (2002): 1202-1210.
[4] Fessler, Jeffrey A., et al. "Toeplitz-based iterative image reconstruction for MRI with correction for magnetic field inhomogeneity." IEEE Transactions on Signal Processing 53.9 (2005): 3393-3402.
[5] Wilm, Bertram J., Christoph Barmet, and Klaas P. Pruessmann. "Fast higher-order MR image reconstruction using singular-vector separation." IEEE transactions on medical imaging 31.7 (2012): 1396-1403.
[6] Mildenhall, Ben, et al. "Nerf: Representing scenes as neural radiance fields for view synthesis." Communications of the ACM 65.1 (2021): 99-106.
[7] Huang, Wenqi, et al. "Neural Implicit k-Space for Binning-Free Non-Cartesian Cardiac MR Imaging." International Conference on Information Processing in Medical Imaging. Cham: Springer Nature Switzerland, 2023.
[8] Muckley, Matthew J., et al. "TorchKbNufft: A high-level, hardware-agnostic non-uniform fast Fourier transform." ISMRM Workshop on Data Sampling & Image Reconstruction. 2020.
[9] Robson, Philip M., et al. "Comprehensive quantification of signal‐to‐noise ratio and g‐factor for image‐based and k‐space‐based parallel imaging reconstructions." Magnetic Resonance in Medicine: An Official Journal of the International Society for Magnetic Resonance in Medicine 60.4 (2008): 895-907.
[10] Pruessmann, Klaas P., et al. "SENSE: sensitivity encoding for fast MRI." Magnetic Resonance in Medicine: An Official Journal of the International Society for Magnetic Resonance in Medicine 42.5 (1999): 952-962.
[11] Cao, Xiaozhi, et al. "Optimized multi‐axis spiral projection MR fingerprinting with subspace reconstruction for rapid whole‐brain high‐isotropic‐resolution quantitative imaging." Magnetic Resonance in Medicine 88.1 (2022): 133-150.
Figures