1018
Self-navigated 3D multi-slab EPI for SNR-efficient high-resolution diffusion MRI1Wellcome Centre for Integrative Neuroimaging, FMRIB, Nuffield Department of Clinical Neurosciences, University of Oxford, Oxford, United Kingdom, 2Biomedical Imaging Research Institute, Cedars-Sinai Medical Center, Los Angeles, CA, United States, 3Department of Radiological Sciences, David Geffen School of Medicine at UCLA, Los Angeles, CA, United States, 4Physical Sciences, Sunnybrook Research Institute, Toronto, ON, Canada, 5Department of Medical Biophysics, University of Toronto, Toronto, ON, Canada
Synopsis
Keywords: Diffusion Acquisition, Sparse & Low-Rank Models, 3D multi-slab imaging, Navigator, Diffusion acquisition, Diffusion reconstruction
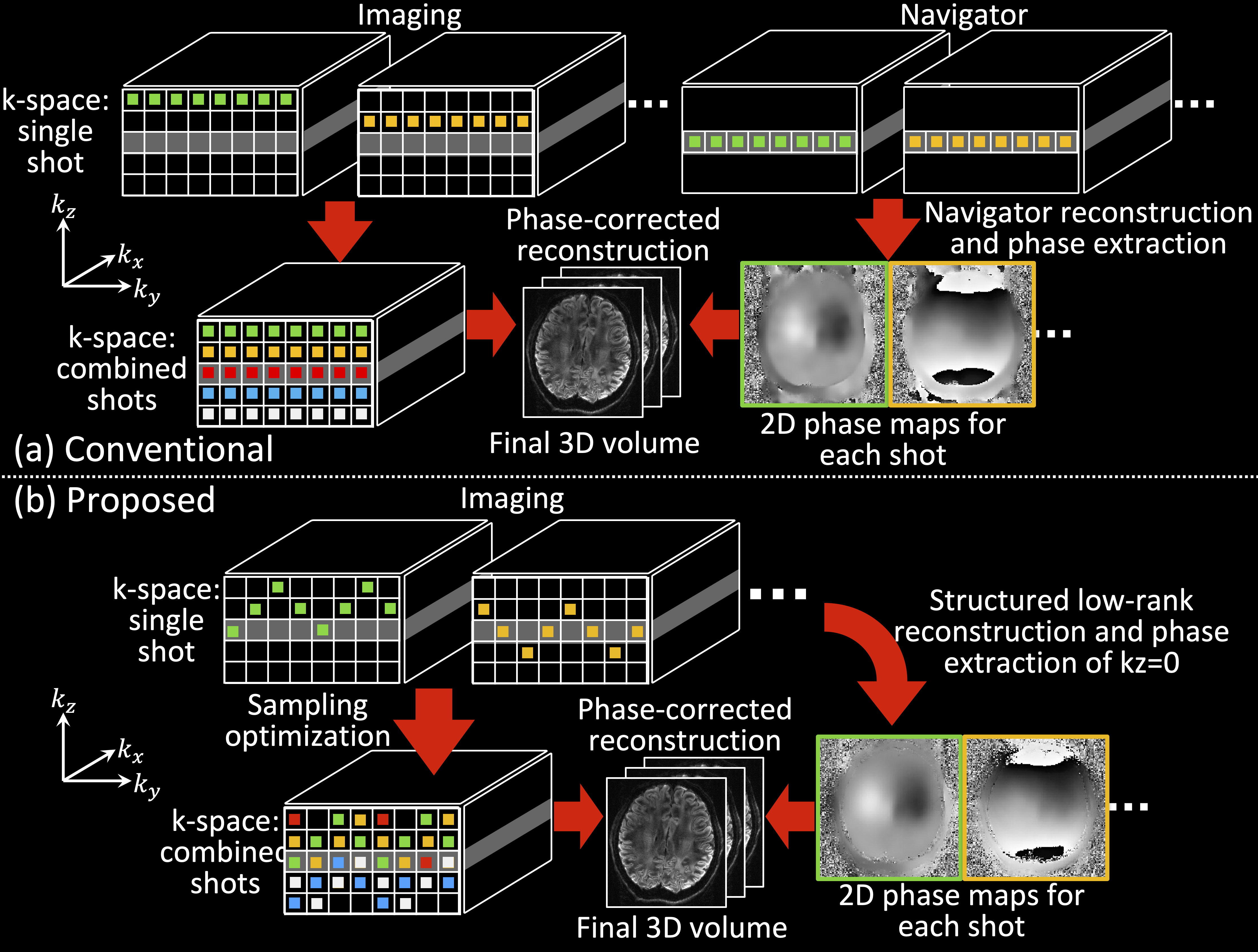
Motivation: 3D multi-slab EPI achieves superior SNR efficiency for high-resolution diffusion MRI but requires navigators for phase correction, which increase scan time and SAR.
Goal(s): To eliminate the requirement for navigators in 3D multi-slab diffusion MRI.
Approach: 3D imaging is intrinsically highly segmented, making self-navigation challenging. Our optimized multi-shot sampling facilitates self-navigation by ensuring each shot intersects with kz=0 plane. The overall sampling pattern’s overlap and gaps are also minimized. A structured low-rank reconstruction is leveraged to reconstruct 2D phase maps from these intersections for phase correction.
Results: Compared to navigated imaging our self-navigated method achieves comparable image quality with 31.4% shorter scan time.
Impact: By removing the need for navigation, our method enables 3D multi-slab diffusion MRI to efficiently achieve TRs with near-optimal SNR efficiency. This approach may permit wider adoption of high-resolution diffusion MRI for basic and clinical neuroscience.
Introduction
3D multi-slab EPI for diffusion MRI (dMRI) has potential to deliver optimal SNR efficiency due to its compatibility with TR=1-2s1-3. However, each shot requires correction of motion-induced phase variations, conventionally using 2D navigators (Fig.1a)1,2,4, increasing the scan time (by 25%-50%2,4). Navigator acquisition thus compromises SNR efficiency and increases SAR.We previously presented simulations of a method for eliminating navigators for 3D multi-slab dMRI5. Our approach uses a novel 3D-EPI sampling scheme with a structured low-rank (SLR) reconstruction. Here, we optimize our sampling scheme (Fig.1b) and present in-vivo experiments demonstrating shortened scan time and improved SNR efficiency.
Methods
Each shot of our trajectory traverses through the kz=0 plane to enable 2D self-navigation. A first stage SLR reconstruction is used to reconstruct the full kz=0 plane of each shot, from which a 2D phase map can be extracted and used to correct phase inconsistency in the multi-shot reconstruction6.Sampling opimization
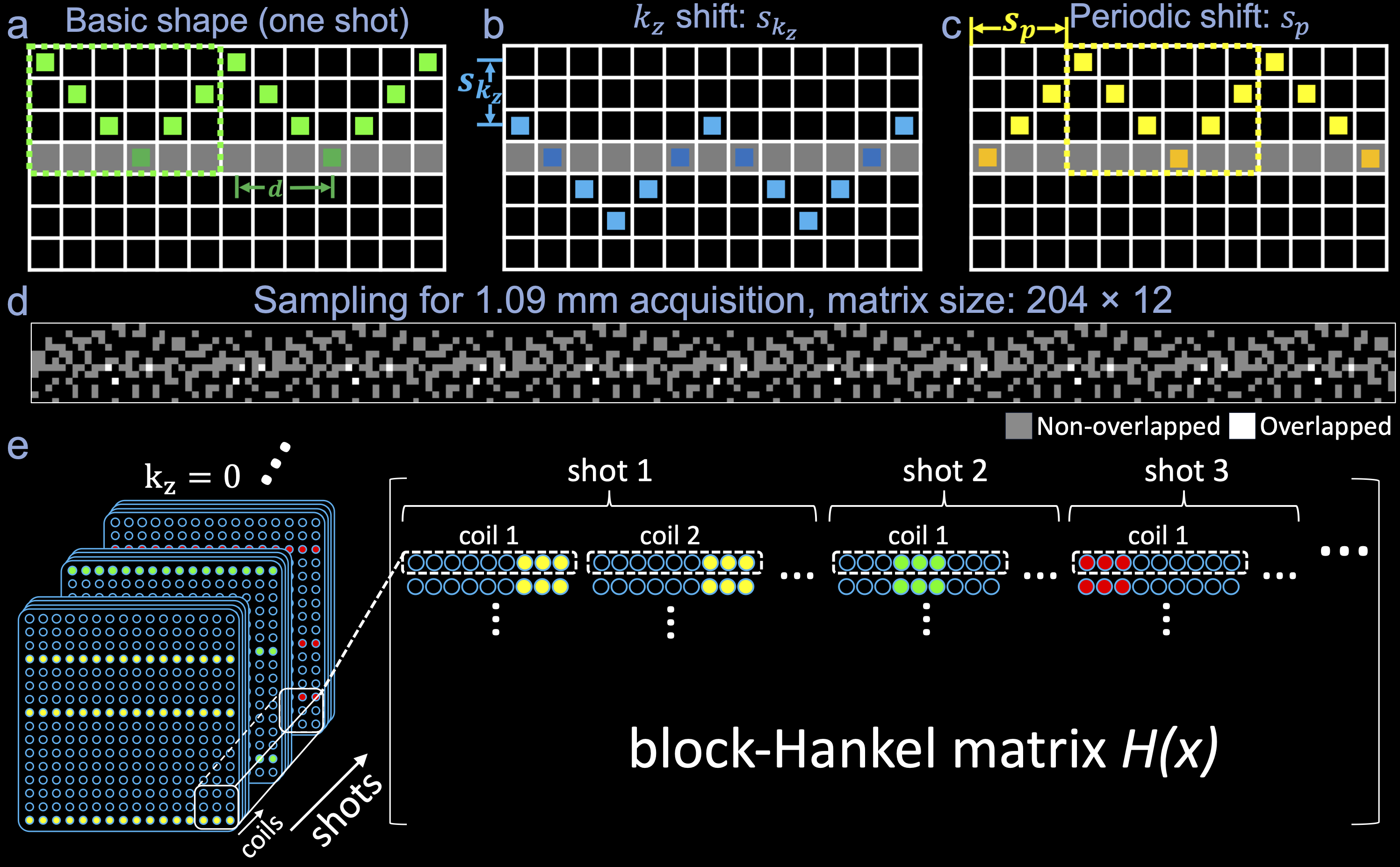
Our approach covers k-space using shifted versions of a by canonical CAIPI sampling pattern (Fig.2). Each shot is characterized by its kz shift ($$$s_{k_z}$$$); ky starting point ($$$s_{p}$$$); and ky shift relative to in-plane acceleration ($$$s_{k_y}$$$).
We optimize the set of shots by solving the following problem:
$$\arg\min_{{s_{p}}_i,{s_{k_y}}_i,{s_{k_z}}_i}o_i+g_i+d_i,s.t.,d_i≤d_{max},$$
to minimize the overlap $$$o_i$$$ (the sum of the total sampling times of all overlapped points in the overall sampling), the k-space gaps $$$g_i$$$ (details below), and the distance $$$d_i$$$ between the closest kz=0 sample and the ky-kz center for ith shot. The $$$o_i$$$ and $$$g_i$$$ terms optimize sampling for the final multi-shot reconstruction, while the $$$d_i$$$ term optimizes sampling for 2D phase map reconstruction for self-navigation. To penalize gaps larger than 3x3, the gap term $$$g_i$$$ is quantified by convolving the overall sampling with a 3×3 kernel of all ones and counting the number of zeros. The optimization uses greedy search in a shot-by-shot manner. We fix the first shot to remain entirely within the kz=0 plane (no blips) to accurately capture the magnitude information of kz=0, which is beneficial for the SLR reconstruction7. The optimized sampling (entitled “Self-nav CAIPI”) for 1.09mm isotropic resolution acquisition is demonstrated in Fig.2d.
Image reconstruction
Reconstruction of the kz=0 plane for all shots is undertaken simultaneously to leverage the shared information across shots and coils8. We use a SPIRiT9-SLR reconstruction (solved with ADMM10):
$$\hat{x}=\arg\min_{\hat{x}}{||D_0\hat{x}-y_0||_2^2+\lambda_1||(G_0-I)\hat{x}||_2^2+\lambda_2||H(\hat{x})||_*}.$$
$$$\hat{x}$$$ is the target kz=0 signal, $$$D_0$$$ is the under-sampling operation, $$$y_0$$$ is the acquired multi-coil data, $$$G_0$$$ is the trained SPIRiT kernel, and $$$H(\hat{x})$$$ is the block-Hankel matrix (Fig.2e). The 2D phase maps for each shot are extracted from $$$\hat{x}$$$ and incorporated into the 3D multi-shot reconstruction3 to correct motion-induced phase.
In-vivo experiments
In-vivo data were acquired at 7T using conventional rectangular and Self-nav CAIPI sampling with the following parameters unless specified otherwise: 1.09mm isotropic resolution, 13 slabs (12 slices/slab, 2-slice overlap), 6/8 partial Fourier, conventional (with-navigator): TE1(imaging)/TE2(navigator)/TR=65/133/3500ms, self-navigated: TE/TR=64/2400ms, Ry=3, b=1000s/mm2. Experiments were designed to evaluate:
1) SNR with matched TR: 12 repetitions of conventional and Self-nav CAIPI sampling (both with-navigator) of three directions. One repetition with higher b=2000 and 3000s/mm2 (TE=72/78ms).
2) SNR with different TRs: 12 repetitions of conventional (with-navigator) and Self-nav CAIPI (self-navigated) sampling.
3) DTI: 16 directions using conventional (with-navigator, 12.6min) and Self-nav CAIPI (self-navigated, 8.6min) sampling, with 2 b=0 (blip reversed).
4) Tractography: 48 directions using Self-nav CAIPI (self-navigated, 25.9 minutes) sampling, with 6 b=0 (blip reversed).
Multi-slab data were combined using “NPEN”11 then processed using FSL’s “topup”12,13, “eddy”14, “dtifit”13 and “autoPtx”15-17.
Results
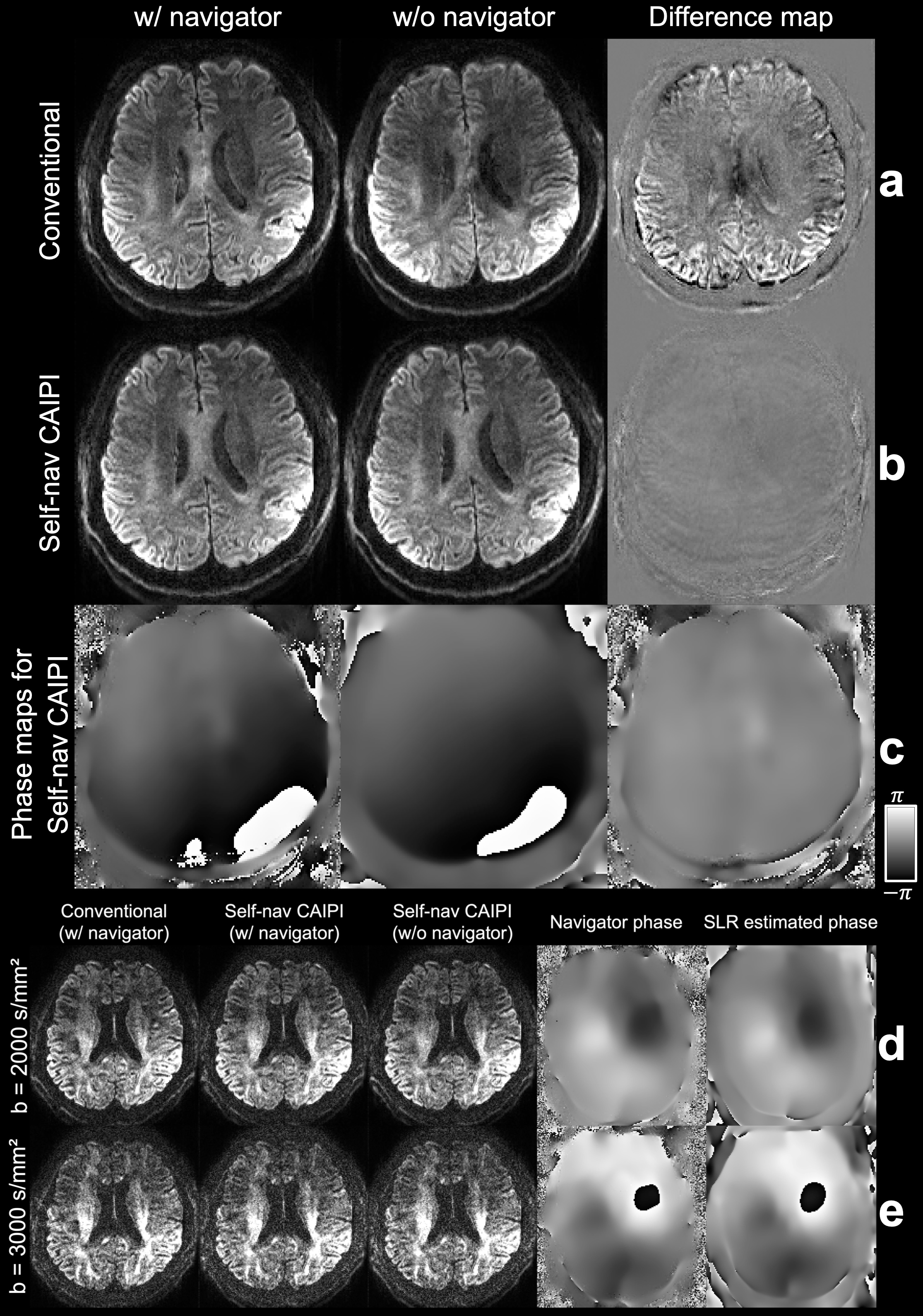
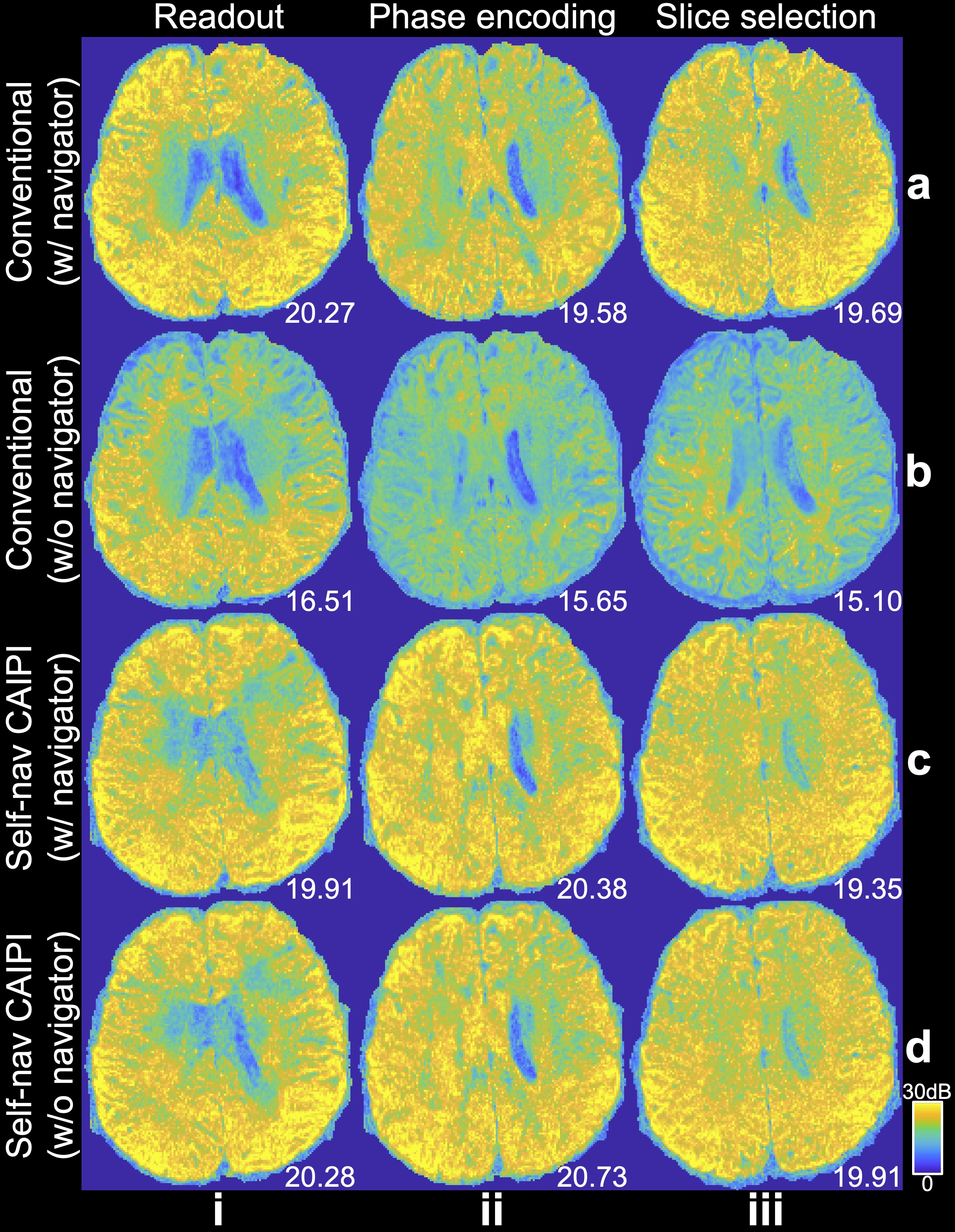
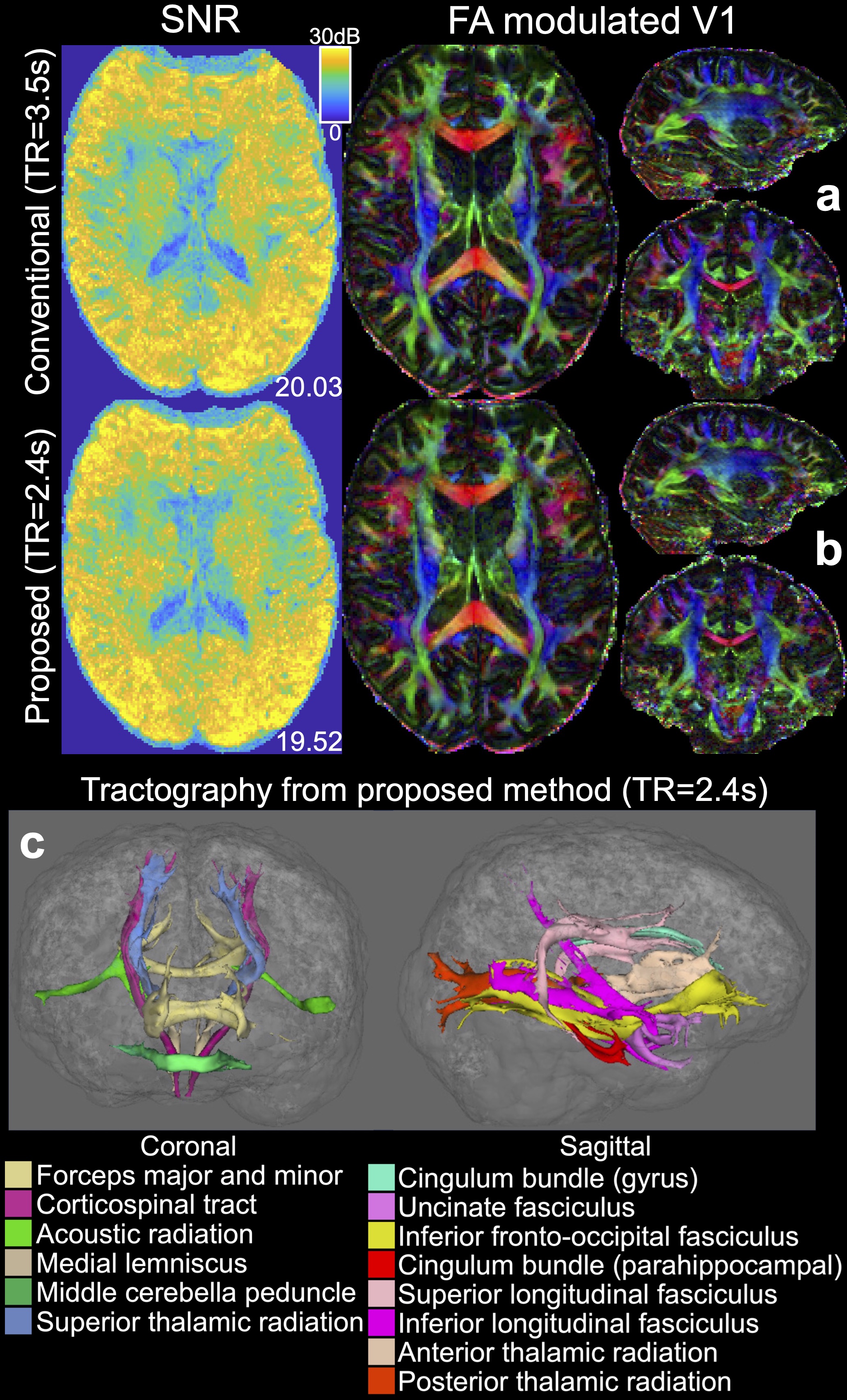
Figure 3 compares conventional and self-navigated image quality. Our self-navigated approach produces high-quality images, which are consistent with those with acquired navigators (Fig.3b,c). The conventional method without navigators, which would achieve similar scan times to self-navigation, suffers from strong artifacts (Fig.3a). Our method also demonstrates robustness at high b-values (Fig.3d,e).With matched TR, our self-navigated approach exhibits comparable SNR to conventional navigated methods (Fig.4). Without an explicitly acquired navigator, we were able to shorten the TR from 3.5s to 2.4s. Our self-navigated images had comparable SNR to the conventional method (Fig.5a,b) despite 31.4% reduction in the TR, indicating an increase in SNR efficiency ($$$SNR/\sqrt{TR}$$$) from 10.71 to 12.60 (17.65%). These data produced comparable DTI metric quality to conventional approaches (Fig.5a,b). Tractography results capture all fiber bundles included in autoPtx, demonstrating the data’s good SNR (Fig.5c).
Discussion and Conclusion
Elimination of navigators can shorten the TR and reduce SAR for 3D multi-slab dMRI. Using our optimized k-space sampling method, we demonstrate self-navigation capacity without compromising reconstructed image quality. Our experiments demonstrate higher SNR efficiency than navigator-based acquisition, demonstrating potential benefit for neuroscientific applications.Acknowledgements
W.W. is supported by the Royal Academy of Engineering (RF\201819\18\92). K.L.M. is supported by the Wellcome Trust (WT202788/Z/16/A). M.C. is supported by the Canada Research Chair Program. This study is supported by the NIHR Oxford Health Biomedical Research Centre (NIHR203316). The views expressed are those of the author(s) and not necessarily those of the NIHR or the Department of Health and Social Care. The Wellcome Centre for Integrative Neuroimaging is supported by core funding from the Wellcome Trust (203139/Z/16/Z and 203139/A/16/Z).References
1. Wu W, Poser BA, Douaud G, et al. High-resolution diffusion MRI at 7T using a three-dimensional multi-slab acquisition. NeuroImage. 2016;143:1-14.
2. Engström M, Skare S. Diffusion‐weighted 3D multislab echo planar imaging for high signal‐to‐noise ratio efficiency and isotropic image resolution. Magnetic resonance in medicine. 2013;70(6):1507-1514.
3. Li Z, Miller KL, Andersson JL, et al. Sampling strategies and integrated reconstruction for reducing distortion and boundary slice aliasing in high‐resolution 3D diffusion MRI. Magnetic Resonance in Medicine. 2023; 90(4):1484-1501.
4. Moeller S, Ramanna S, Lenglet C, et al. Self‐navigation for 3D multishot EPI with data‐reference. Magnetic resonance in medicine. 2020;84(4):1747-1762.
5. Li Z, Chen X, Chiew M, Miller KL, Wu W. Self-navigated high-resolution 3D diffusion MRI using an extended blipped-CAIPI sampling and structured low-rank reconstruction. In Proceedings of the International Society for Magnetic Resonance in Medicine (ISMRM), 2023:5137.
6. Miller KL, Pauly JM. Nonlinear phase correction for navigated diffusion imaging. Magnetic Resonance in Medicine: An Official Journal of the International Society for Magnetic Resonance in Medicine. 2003;50(2):343-353.
7. Mani M, Jacob M, Kelley D, Magnotta V. Multi‐shot sensitivity‐encoded diffusion data recovery using structured low‐rank matrix completion (MUSSELS). Magnetic resonance in medicine. 2017;78(2):494-507.
8. Shin PJ, Larson PE, Ohliger MA, et al. Calibrationless parallel imaging reconstruction based on structured low‐rank matrix completion. Magnetic resonance in medicine. 2014;72(4):959-970.
9. Lustig M, Pauly JM. SPIRiT: iterative self‐consistent parallel imaging reconstruction from arbitrary k‐space. Magnetic resonance in medicine. 2010;64(2):457-471.
10. Boyd S, Parikh N, Chu E, Peleato B, Eckstein J. Distributed optimization and statistical learning via the alternating direction method of multipliers. Foundations and Trends® in Machine learning. 2011;3(1):1-122.
11. Wu W, Koopmans PJ, Frost R, Miller KL. Reducing slab boundary artifacts in three‐dimensional multislab diffusion MRI using nonlinear inversion for slab profile encoding (NPEN). Magnetic resonance in medicine. 2016;76(4):1183-1195.
12. Andersson JL, Skare S, Ashburner J. How to correct susceptibility distortions in spin-echo echo-planar images: application to diffusion tensor imaging. Neuroimage. 2003;20(2):870-888.
13. Smith SM, Jenkinson M, Woolrich MW, et al. Advances in functional and structural MR image analysis and implementation as FSL. Neuroimage. 2004;23:S208-S219.
14. Andersson JL, Sotiropoulos SN. An integrated approach to correction for off-resonance effects and subject movement in diffusion MR imaging. Neuroimage. 2016;125:1063-1078.
15. Behrens TE, Woolrich MW, Jenkinson M, et al. Characterization and propagation of uncertainty in diffusion‐weighted MR imaging. Magnetic Resonance in Medicine: An Official Journal of the International Society for Magnetic Resonance in Medicine. 2003;50(5):1077-1088.
16. Behrens TE, Berg HJ, Jbabdi S, Rushworth MF, Woolrich MW. Probabilistic diffusion tractography with multiple fibre orientations: What can we gain? neuroimage. 2007;34(1):144-155.
17. De Groot M, Vernooij MW, Klein S, et al. Improving alignment in tract-based spatial statistics: evaluation and optimization of image registration. Neuroimage. 2013;76:400-411.
Figures