0457
An Algorithm using Artifact Features for Needle Tip Localization in Interventional MRI1School of Biomedical Engineering, Shanghai Jiao Tong University, Shanghai, China
Synopsis
Keywords: MR-Guided Interventions, MR-Guided Interventions, localization, needle artifact
Motivation: Needle tip localization is crucial for accurate and safe image-guided intervention, especially for real-time interventional MRI.
Goal(s): To develop an algorithm that utilizes artifact features of the needle tip as prior information for needle tip localization.
Approach: Combines target tracking and template matching techniques for accurate needle tip localization.
Results: The algorithm's performance has been evaluated using both simulation and physical models. Validation results demonstrate that the algorithm enables fast identification, stable tracking, and highly precise needle tip localization.
Impact: This needle tip localization method, leveraging artifact features as prior information, opens up new possibilities for the development of needle localization and tracking algorithms based on artifacts.
Introduction
Interventional magnetic resonance imaging (i-MRI) plays a vital role in image-guided surgery such as deep brain stimulation and biopsy. Real-time i-MRI provides high temporal resolution, enabling accurate localization of interventional needles, which in turn facilitates robotic control and operation for improved accuracy1-3. However, metallic needles can cause magnetic field effects that lead to artifacts in MR images, making it challenging to precisely locate the needle tip4,5. The morphology of the needle tip artifact is influenced by the intervention angle (IA) relative to the B0 field and the pulse sequence type6,7. This suggests that the artifacts can be utilized for needle tip localization. To address this, we have developed an algorithm that combines target tracking and template matching for fast and precise localization of the needle tip in artifact images.Methods
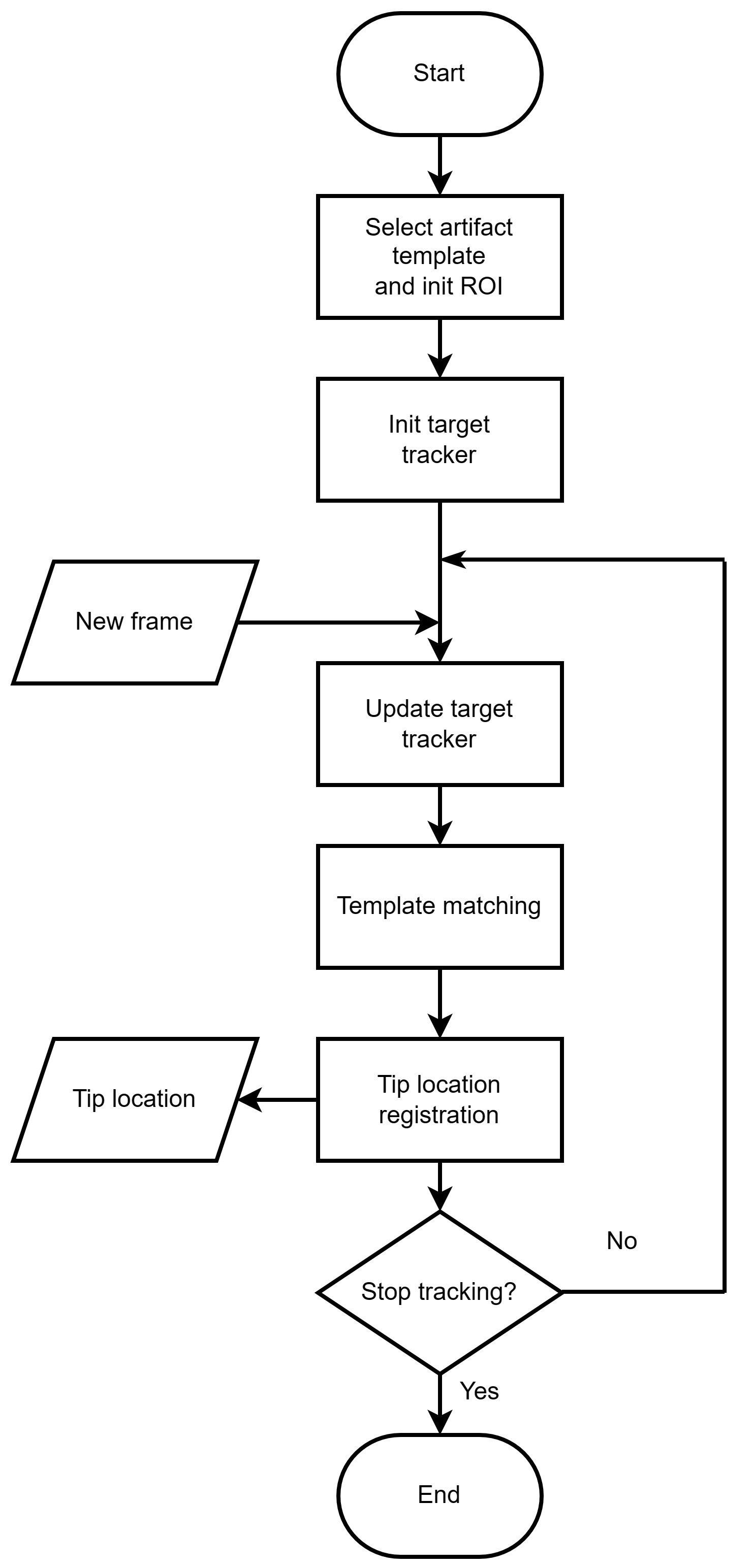
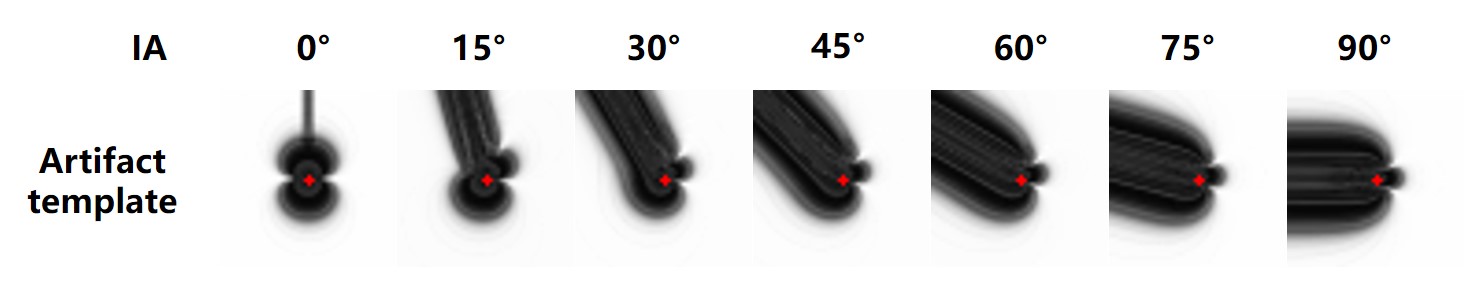
The proposed algorithm utilizes both target tracking and template matching techniques (Figure 1). Initially, a template image is generated using the imaging parameters. To achieve continuous tracking, the KCF algorithm is employed to track the needle tip region and update the region of interest (ROI) accordingly8. Subsequently, the ROI is matched with the artifact template using a template matching algorithm based on the Normalized Cross-Correlation (NCC) technique. Finally, the position of the needle tip in the artifact template is registered within the complete artifact image.In order to generate the artifact template images, a simulation approach was employed (Figure 3). The templates were created through simulation using a gradient-echo sequence with a voxel size of 128×512×512 and a resolution of 0.5×0.5×0.5 mm3. The simulated image consisted of 256×256 voxels with a resolution of 1.0×1.0 mm2. The diameter of the needle was set at 1.5mm, and the susceptibility was set at 304ppm, which matches the values of the experimental devices used in the study.
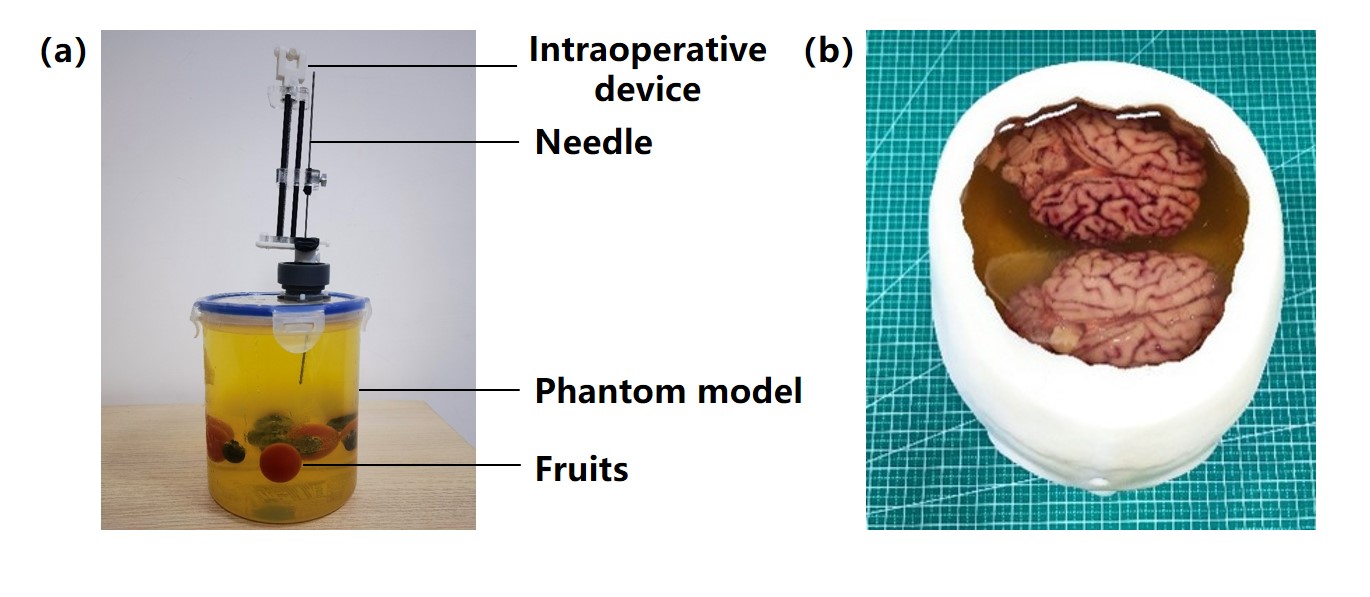
To validate the proposed algorithm, real-time i-MRI experiments were conducted using both a phantom and porcine brain (Figure 2). An interventional needle composed of β-Ti with a diameter of 1.5mm and a susceptibility of 304ppm was utilized. To acquire the images, a 2D gradient-echo based radial sampling sequence was employed9. A total of 100 image frames were collected for each of the two experiments. Moreover, templates representing interventional processes were generated for testing and evaluating the algorithm's performance at both IA=0° and IA=30° angles.
Results
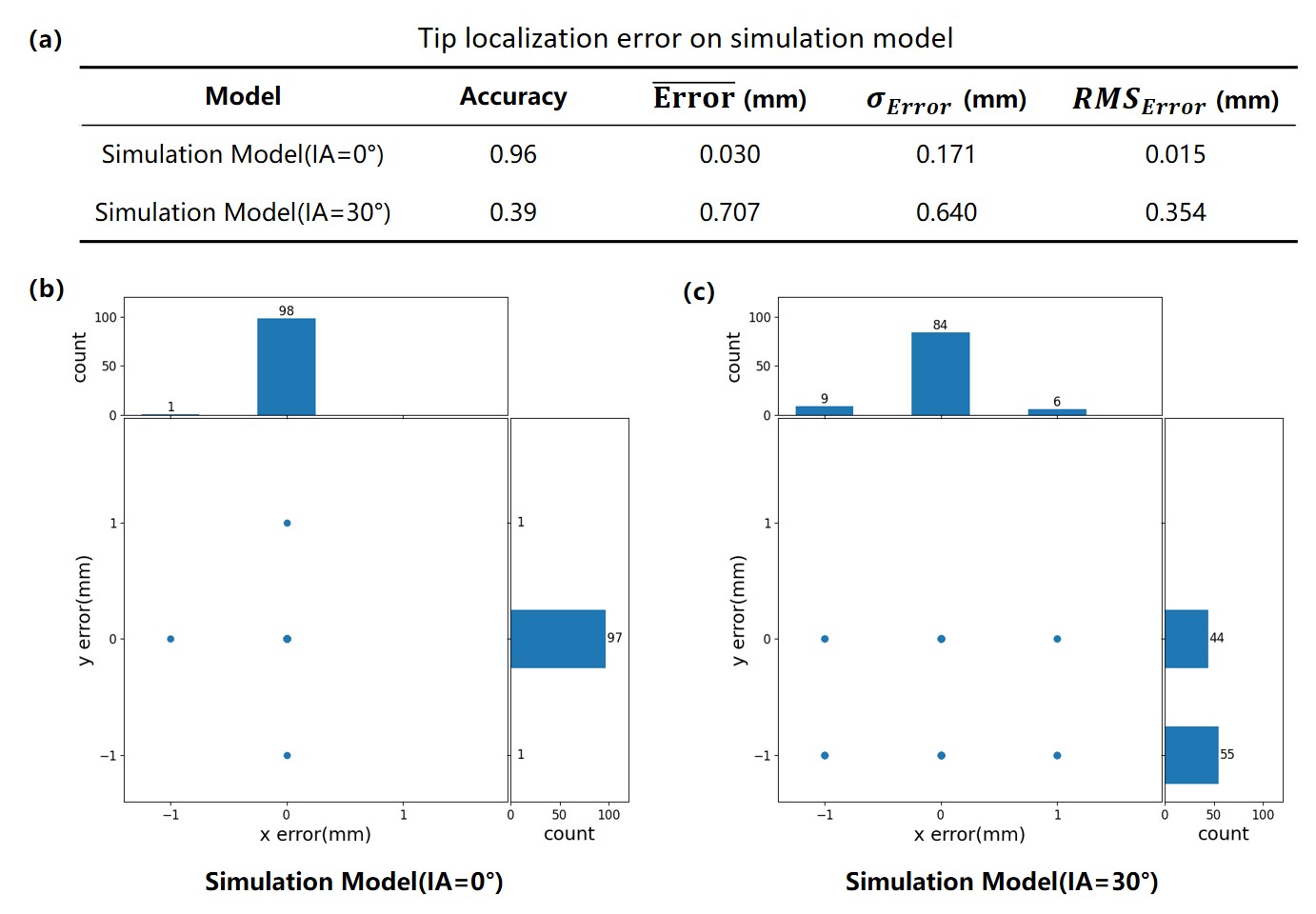
Both the simulation and experimental results demonstrated that the proposed algorithm effectively localizes the needle tip (Figure 4). The algorithm achieves an average error of 0.01 for IA=0° and 0.35 for IA=30°, with individual direction errors not exceeding 1mm, as presented in Figure 5. It is worth noting that the algorithm performs better at IA=0° compared to IA=30°, which can be attributed to the more distinguishable artifact features at IA=0°. The recognition speed of the algorithm is approximately 600fps, based on the hardware specifications of an i5-13400 processor with 64G memory. This meets the temporal resolution requirements for real-time i-MRI.Discussion
This study utilized metallic artifacts as prior information for needle tip localization, taking advantage of their characteristic morphological features. In contrast to deep learning-based methods 10,11, the proposed approach offers improved precision, stable tracking, and enhanced interpretability. However, it is important to note that the accuracy of needle tip localization is dependent on the alignment between the artifact template and the actual artifact, which represents a potential source of error.Conclusion
In this study, we have presented an algorithm for needle tip localization that utilizes target tracking and template matching techniques, leveraging the distinctive morphological features of metallic artifacts as prior information. Through simulations and experiments, we have demonstrated that the proposed algorithm provides fast identification, stable tracking, and high precision in localizing the needle tip. As part of future work, we aim to further enhance the matching algorithm to achieve even better localization results.Acknowledgements
Funding supports from the National Key R&D Program of China (grant 2022YFB4702704, Y.F., 2022YFB4702700, G.-Z. Y.), the National Natural Science Foundation of China (grant 32322042, Y.F., 32271359, Y.F., 12090024, X.Z.), the Natural Science Foundation of Shanghai (grant 22ZR1429600, Y.F.), Science and Technology Commission of Shanghai Municipality (grant 20DZ2220400, G.-Z. Y.), and Shanghai Municipal Science and Technology Major Project (grant 2021SHZDZX, G.-Z. Y., 2021SHZDZX0102, X.Z.) are acknowledged.
References
1. Olsen ME, Brodsky EK, Oler JA, et al. Real-time trajectory guide tracking for intraoperative MRI-guided neurosurgery. Magnetic Resonance in Medicine. 2023;89(2):710-720.
2. Blanco RT, Ojala R, Kariniemi J, Perälä J, Niinimäki J, Tervonen O. Interventional and intraoperative MRI at low field scanner – a review. European Journal of Radiology. 2005;56(2):130-142.
3. Soneru CP, Riley CA, Hoffman K, Tabaee A, Schwartz TH. Intra-operative MRI vs endoscopy in achieving gross total resection of pituitary adenomas: a systematic review. Acta Neurochirurgica. 2019;161(8):1683-1698.
4. Ladd ME, Erhart P, Debatin JF, Romanowski BJ, Boesiger P, McKinnon GC. Biopsy needle susceptibility artifacts. Magnetic Resonance in Medicine. 1996;36(4):646-651.
5. Liu H, Hall WA, Martin AJ, Truwit CL. Biopsy needle tip artifact in MR-guided neurosurgery. Journal of magnetic resonance imaging: JMRI. 2001;13(1):16-22.
6. Song S-E, Cho NB, Iordachita II, et al. Biopsy Needle Artifact Localization in MRI-Guided Robotic Transrectal Prostate Intervention. IEEE Transactions on Biomedical Engineering. 2012;59(7):1902-1911.
7. Schmidt VF, Dietrich O, Seidensticker M, et al. Artifact characterization of Nitinol needles in magnetic resonance imaging-guided musculoskeletal interventions at 3.0 tesla: a phantom study. Diagnostic and Interventional Radiology (Ankara, Turkey). 2023;29(5):719-732.
8. Henriques JF, Caseiro R, Martins P, Batista J. High-Speed Tracking with Kernelized Correlation Filters. Ieee Transactions on Pattern Analysis and Machine Intelligence. 2015;37(3):583-596.
9. He Z, Zhu YN, Qiu SH, et al. Low-Rank and Framelet Based Sparsity Decomposition for Interventional MRI Reconstruction. Ieee Transactions on Biomedical Engineering. 2022;69(7):2294-2304.
10. Li X, Young AS, Raman SS, et al. Automatic needle tracking using Mask R-CNN for MRI-guided percutaneous interventions. International Journal of Computer Assisted Radiology and Surgery. 2020;15(10):1673-1684.
11. Mehrtash A, Ghafoorian M, Pernelle G, et al. Automatic Needle Segmentation and Localization in MRI With 3-D Convolutional Neural Networks: Application to MRI-Targeted Prostate Biopsy. IEEE transactions on medical imaging. 2019;38(4):1026-1036.
Figures