0455
Transformer-Based Automatic Pipeline for 3D Needle Localization on Intra-Procedural 3D MRI1Department of Radiological Sciences, UCLA, Los Angeles, CA, United States
Synopsis
Keywords: MR-Guided Interventions, Segmentation
Motivation: Needle localization on 3D magnetic resonance imaging (MRI) is critical for MRI-guided percutaneous interventions, but current manual methods are time-consuming.
Goal(s): To develop a transformer-based pipeline for accurate and rapid automatic 3D needle localization on intra-procedural 3D MRI.
Approach: The proposed pipeline adopted a coarse-to-fine segmentation strategy by combining 3D and 2D shifted window (Swin) Transformer networks. The performance was evaluated in pre-clinical pig datasets and compared with human-annotated references.
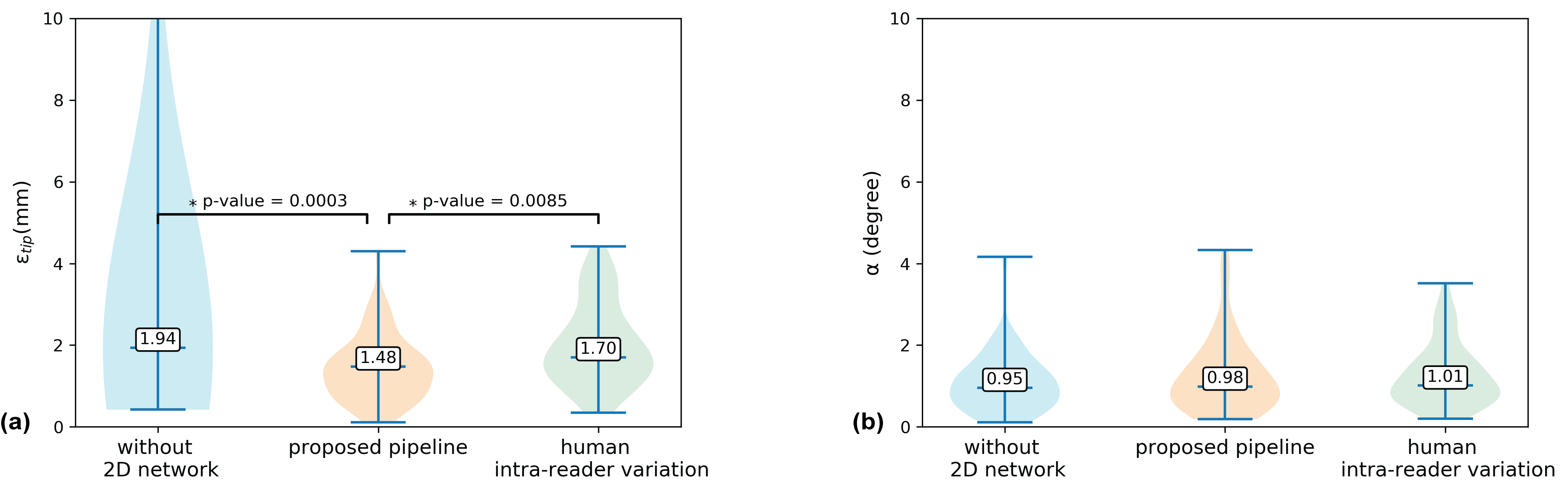
Results: Computation time was 6 sec/volume. The median 3D needle tip and axis localization errors were 1.48 mm (1.09 pixels) and 0.98°, which were comparable to human-level accuracy.
Impact: The automatic transformer-based pipeline developed in this work achieved rapid (~6s) and accurate pixel-level 3D needle localization on intra-procedural 3D MRI. This new pipeline has the potential to improve MRI-guided percutaneous interventions.
Introduction
Magnetic resonance imaging (MRI) has the advantage of providing excellent soft tissue contrast for guiding interventions. However, accurate and rapid 3D needle localization in intra-procedural MR images remains a major challenge1,2. In current workflows, manual needle localization is performed, which is time-consuming and cumbersome3,4. 2D deep learning networks for needle segmentation have achieved promising results5–7, but require manual prescription of a 2D image plane containing the needle feature and do not directly provide 3D position information8. On the other hand, 3D deep learning networks9,10 require large training datasets of intra-procedural 3D MR images, which may not be available for specific applications.For the task of needle segmentation, which requires delineating a relatively small object in a large field-of-view (FOV), convolutional neural network (CNN)-based neural networks (e.g., UNets11) may be suboptimal since the convolution operations lack the ability to efficiently capture global information. To better model the long-range information in large FOVs, researchers have developed transformer-based networks that adopt the self-attention mechanism to capture global interactions between contexts12.
In this work, we developed an automatic pipeline for rapid 3D needle localization by taking advantage of transformer networks. To overcome the restriction of limited 3D datasets for training, we combined the 3D Swin UNEt Transformer (UNETR) and 2D Swin Transformer for coarse-to-fine segmentation, and adopted pre-training and data augmentation strategies. We evaluated the proposed pipeline using pre-clinical intra-procedural 3D MRI datasets.
Methods
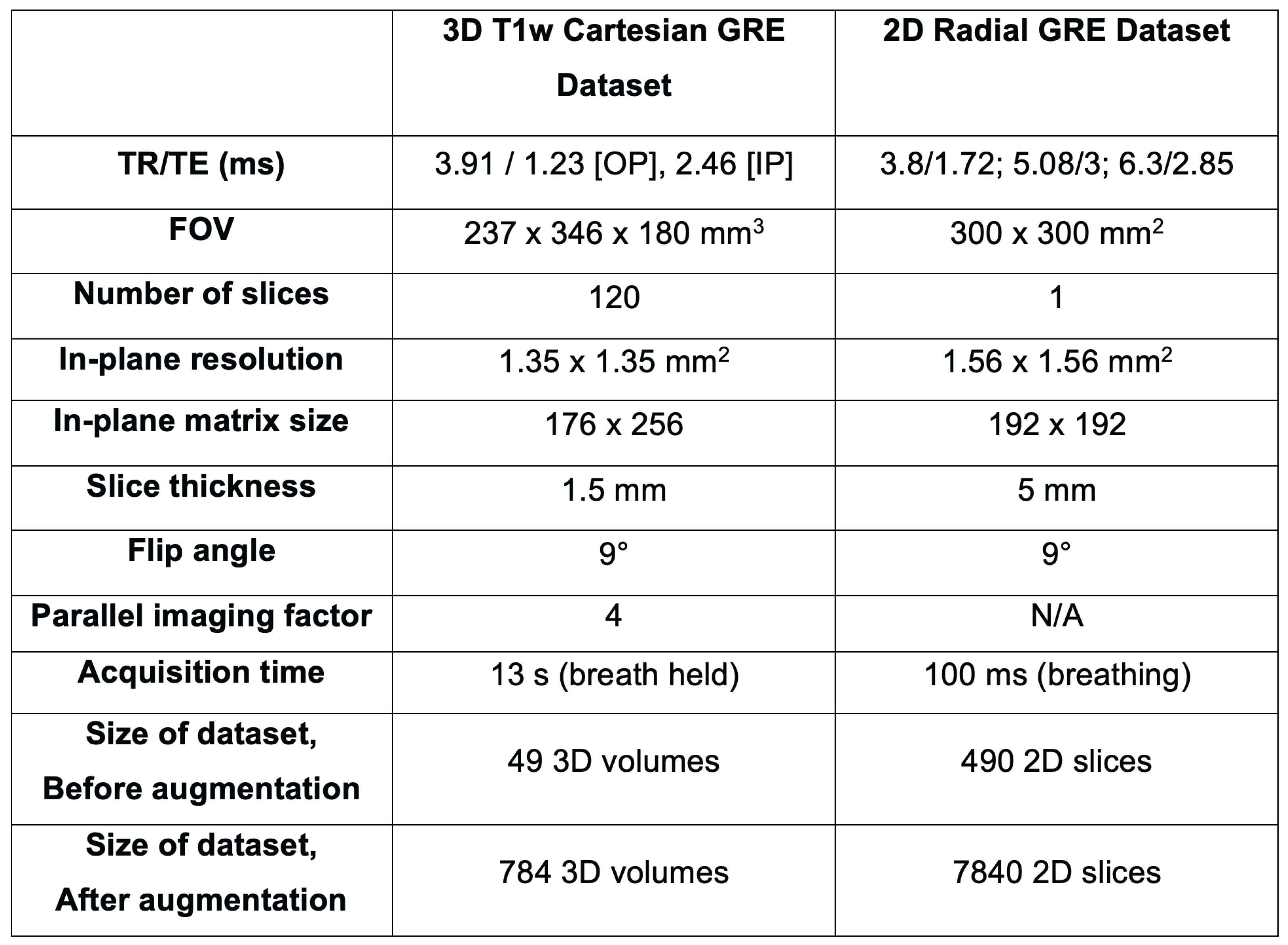
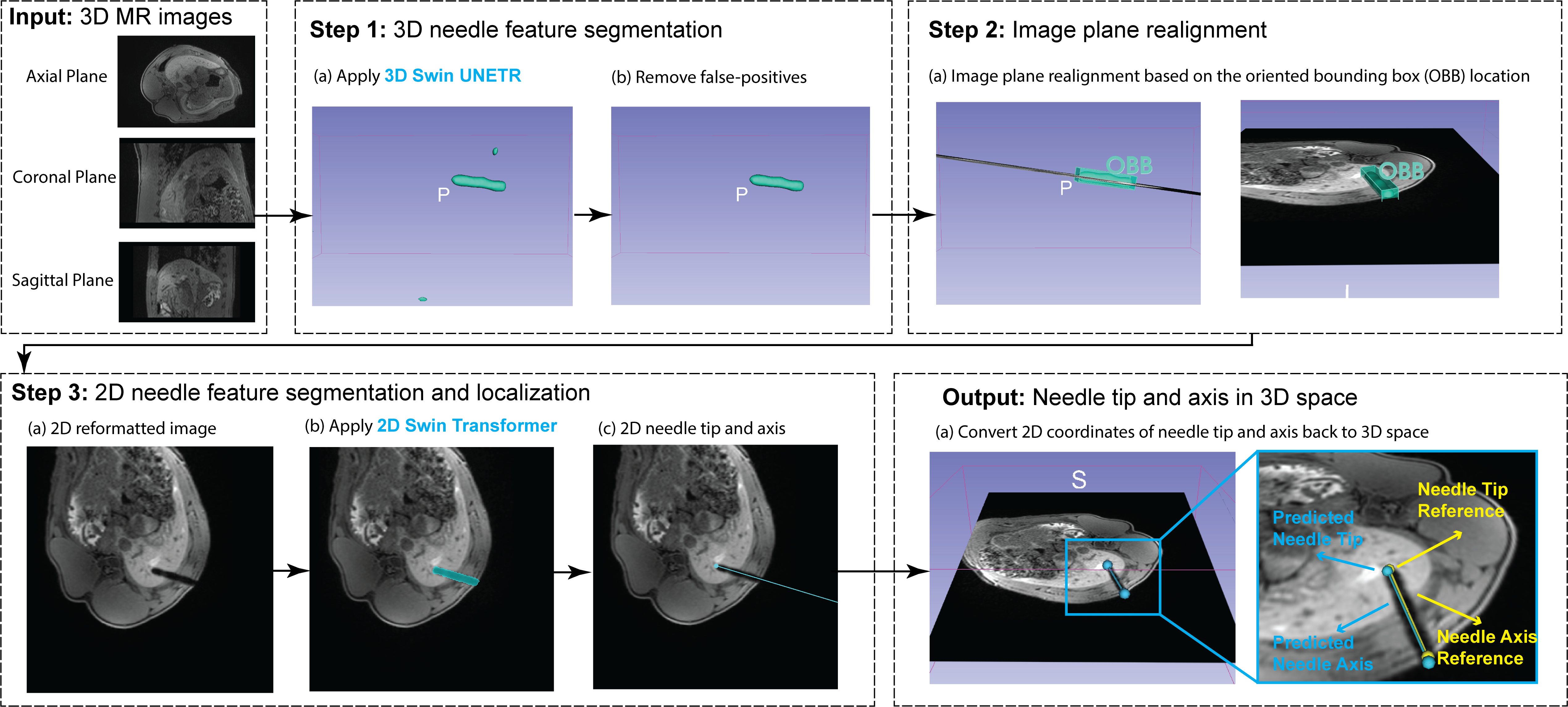
Datasets: In an animal research committee-approved study, we performed MRI-guided needle interventions in the livers of seven healthy female pigs at 3T (MAGNETOM Prisma, Siemens). 3D T1-weighted (T1w) GRE Dixon MR images containing the needle feature and 2D real-time radial GRE images aligned with the needle axis were collected (parameters in Figure 1). The segmentation mask and needle tip and entry point were annotated by a trained researcher supervised by a radiologist, with a wash out period of two weeks to assess intra-reader variation.Automatic 3D Needle Localization Pipeline: The proposed pipeline (Figure 2) had three main steps: (1) initial 3D needle feature segmentation with 3D Swin UNETR; (2) generation of a 2D reformatted image containing the needle feature; (3) fine 2D needle feature segmentation with 2D Swin Transformer and 3D needle localization based on the 3D location of the 2D slice.
Transformer Network Training: For the 3D Swin UNETR, we adopted model weights pre-trained on publicly available CT images13 and fine-tuned it with 3D T1w GRE images. The 2D Swin Transformer was first pre-trained using the 2D radial GRE images and then fine-tuned using the 2D reformatted image generated in Step 2 of the pipeline. Data augmentation was performed.
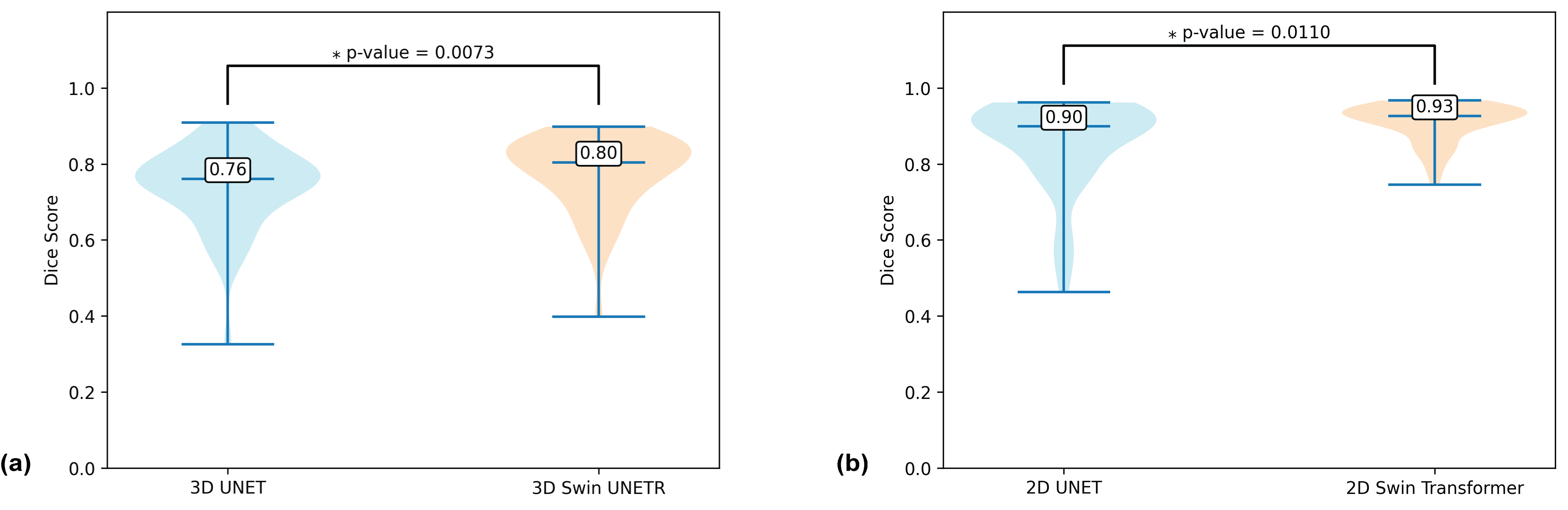
Evaluation Metrics: Seven-fold cross-validation was performed with seven 3D images for validation in each fold. The needle segmentation performance was evaluated by Dice score and compared with 2D and 3D UNets. The needle localization performance was evaluated in terms of needle tip and axis localization error. The needle localization results were compared with a pipeline without the 2D Swin Transformer network and human intra-reader variation.
Results
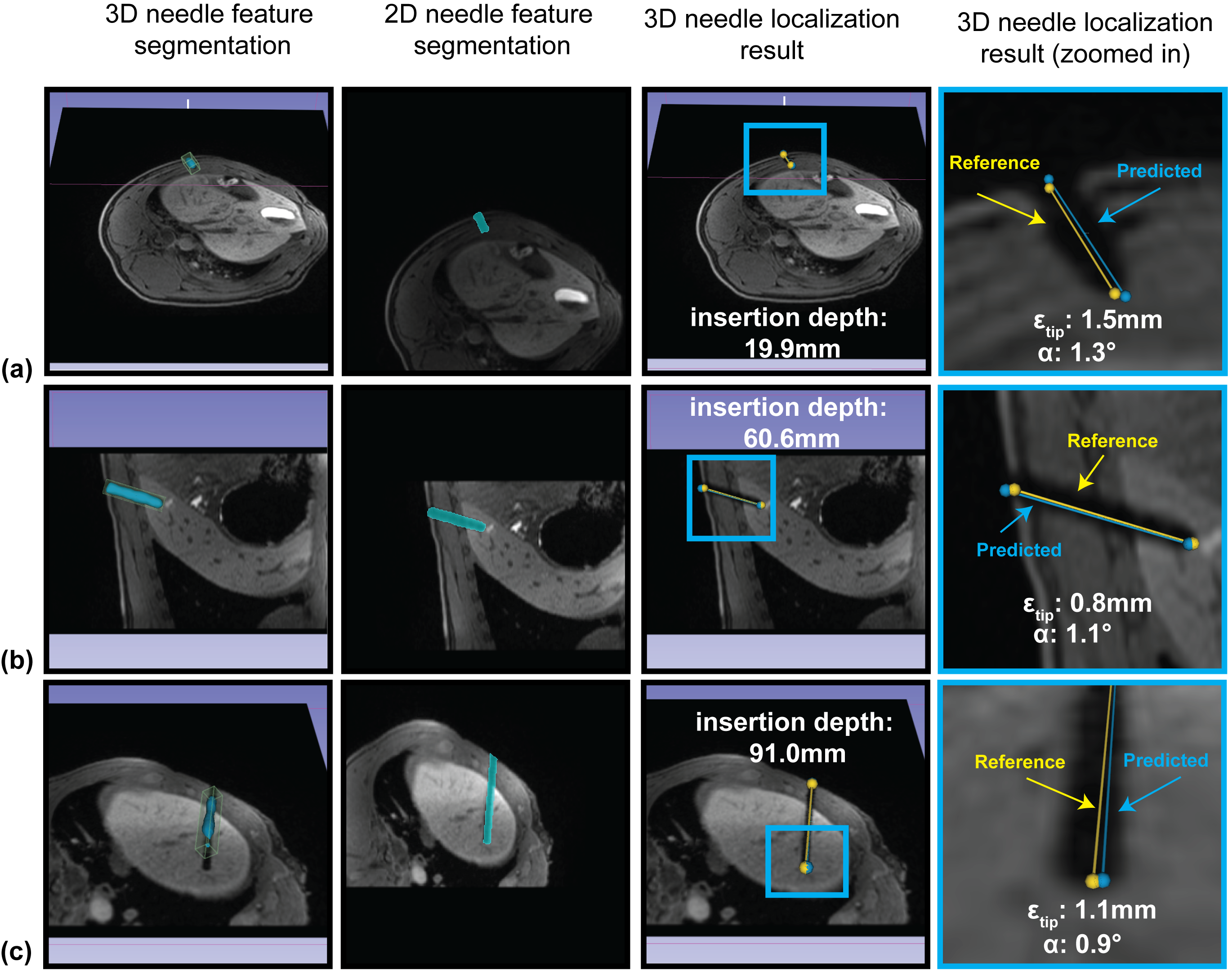
The average inference time on one NVIDIA RTX A6000 GPU was 2.14 sec/volume for 3D Swin UNETR and 0.011 sec/slice for 2D Swin Transformer. The transformer-based networks achieved higher Dice scores compared with 2D and 3D UNets (Figure 3). The end-to-end computational time of the pipeline was ~6 seconds (examples in Figure 4). Figure 5 shows the 3D needle tip localization error (median of 1.48 mm, 1.09 pixels) and axis localization error (median of 0.98°) . The needle tip localization error of the pipeline was significantly smaller than that of the pipeline without the 2D network and human intra-reader variation.Discussion
By applying pre-training and data augmentation, we were able to train the 3D and 2D transformer networks with a limited dataset. Both transformer networks outperformed the UNets for needle segmentation with their global information-capturing ability. After initial needle segmentation using 3D Swin UNETR, the pipeline automatically performed image plane realignment and compensated for the over- or under-segmentation in initial 3D segmentations by fine needle segmentation using 2D Swin Transformer. Our proposed pipeline achieved rapid (~6s) 3D needle localization with accuracy sufficient for liver interventions where relevant lesions have a diameter of at least 5-10 mm14.Conclusion
We developed an automatic 3D needle localization pipeline that combined 3D and 2D transformer-based networks. The pipeline achieved rapid and accurate 3D needle localization within the range of expert human performance, and thus has potential to improve MRI-guided percutaneous interventions.Acknowledgements
This work was supported in part by the NIH/NIBIB (R01 EB031934), the Department of Radiological Sciences at UCLA, and Siemens Medical Solutions USA.References
1. Raj SD, Agrons MM, Woodtichartpreecha P, et al. MRI-guided needle localization: Indications, tips, tricks, and review of the literature. The Breast Journal. 2019;25(3):479-483. doi:10.1111/tbj.132462. DeAngelis GA, Moran RE, Fajardo LL, Mugler JP, Christopher JM, Harvey JA. MRI-guided needle localization: Technique. Seminars in Ultrasound, CT and MRI. 2000;21(5):337-350. doi:10.1016/S0887-2171(00)90028-3
3. Meinhold W, Martinez DE, Oshinski J, Hu AP, Ueda J. A direct drive parallel plane piezoelectric needle positioning robot for MRI guided intraspinal injection. IEEE Transactions on Biomedical Engineering. 2020;68(3):807-814.
4. Morris EA, Liberman L, Dershaw DD, et al. Preoperative MR Imaging—Guided Needle Localization of Breast Lesions. American Journal of Roentgenology. 2002;178(5):1211-1220. doi:10.2214/ajr.178.5.1781211
5. Li X, Young AS, Raman SS, et al. Automatic needle tracking using Mask R-CNN for MRI-guided percutaneous interventions. Int J CARS. 2020;15(10):1673-1684. doi:10.1007/s11548-020-02226-8
6. Li X, Lee YH, Lu DS, Tsao TC, Wu HH. Physics-Driven Mask R-CNN for Physical Needle Localization in MRI-Guided Percutaneous Interventions. IEEE Access. 2021;9:161055-161068. doi:10.1109/ACCESS.2021.3128163
7. Weine J, Rothgang E, Wacker F, Weiss CR, Maier F. Passive Needle Tracking with Deep Convolutional Neural Nets for MR-Guided Percutaneous Interventions. In: Proceedings of 12th Interventional MRI Symposium Oct. Vol 12. ; 2018:53.
8. Lee EJ, Farzinfard S, Yarmolenko P, Cleary K, Monfaredi R. Toward Robust Partial-Image Based Template Matching Techniques for MRI-Guided Interventions. J Digit Imaging. 2023;36(1):153-163. doi:10.1007/s10278-022-00716-6
9. Mehrtash A, Ghafoorian M, Pernelle G, et al. Automatic Needle Segmentation and Localization in MRI With 3-D Convolutional Neural Networks: Application to MRI-Targeted Prostate Biopsy. IEEE Transactions on Medical Imaging. 2019;38(4):1026-1036. doi:10.1109/TMI.2018.2876796
10. Weine J, Breton E, Garnon J, Gangi A, Maier F. Deep learning based needle localization on real-time MR images of patients acquired during MR-guided percutaneous interventions. In: Proceedings of the 27th Annual Meeting of ISMRM, Montreal, Canada. ; 2019:973.
11. Krithika alias AnbuDevi M, Suganthi K. Review of Semantic Segmentation of Medical Images Using Modified Architectures of UNET. Diagnostics. 2022;12(12):3064. doi:10.3390/diagnostics12123064
12. Dosovitskiy A, Beyer L, Kolesnikov A, et al. An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale. Published online June 3, 2021. Accessed July 10, 2023. http://arxiv.org/abs/2010.11929
13. Tang Y, Yang D, Li W, et al. Self-supervised pre-training of swin transformers for 3d medical image analysis. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. ; 2022:20730-20740.
14. Moche M, Heinig S, Garnov N, et al. Navigated MRI-guided liver biopsies in a closed-bore scanner: experience in 52 patients. Eur Radiol. 2016;26(8):2462-2470. doi:10.1007/s00330-015-4097-1
Figures