0392
High temporal resolution motion correction in MRF using quantitative-scout-based navigation (QUEEN) and motion-dictionary matching.1Radiology, Stanford University, Stanford, CA, United States, 2Bioengineering, Stanford University, Stanford, CA, United States, 3Electrical Engineering, Stanford University, Stanford, CA, United States
Synopsis
Keywords: Motion Correction, Motion Correction
Motivation: Motion correction in MRF using navigators in sequence deadtime improves imaging robustness, however, temporal resolution of the approaches is limited to 6-10 s.
Goal(s): We aim to achieve accurate motion tracking at 0.5 s temporal resolution, by integrating the QUantitatively-Enhanced parameter Estimation from Navigators (QUEEN) approach into MRF.
Approach: Compact navigators were inserted throughout the MRF acquisition at a minimal encoding efficiency reduction of ~5%. The acquisition of the quantitative scout was integrated into the MRF’s dummy scan, resulting in no added scantime.
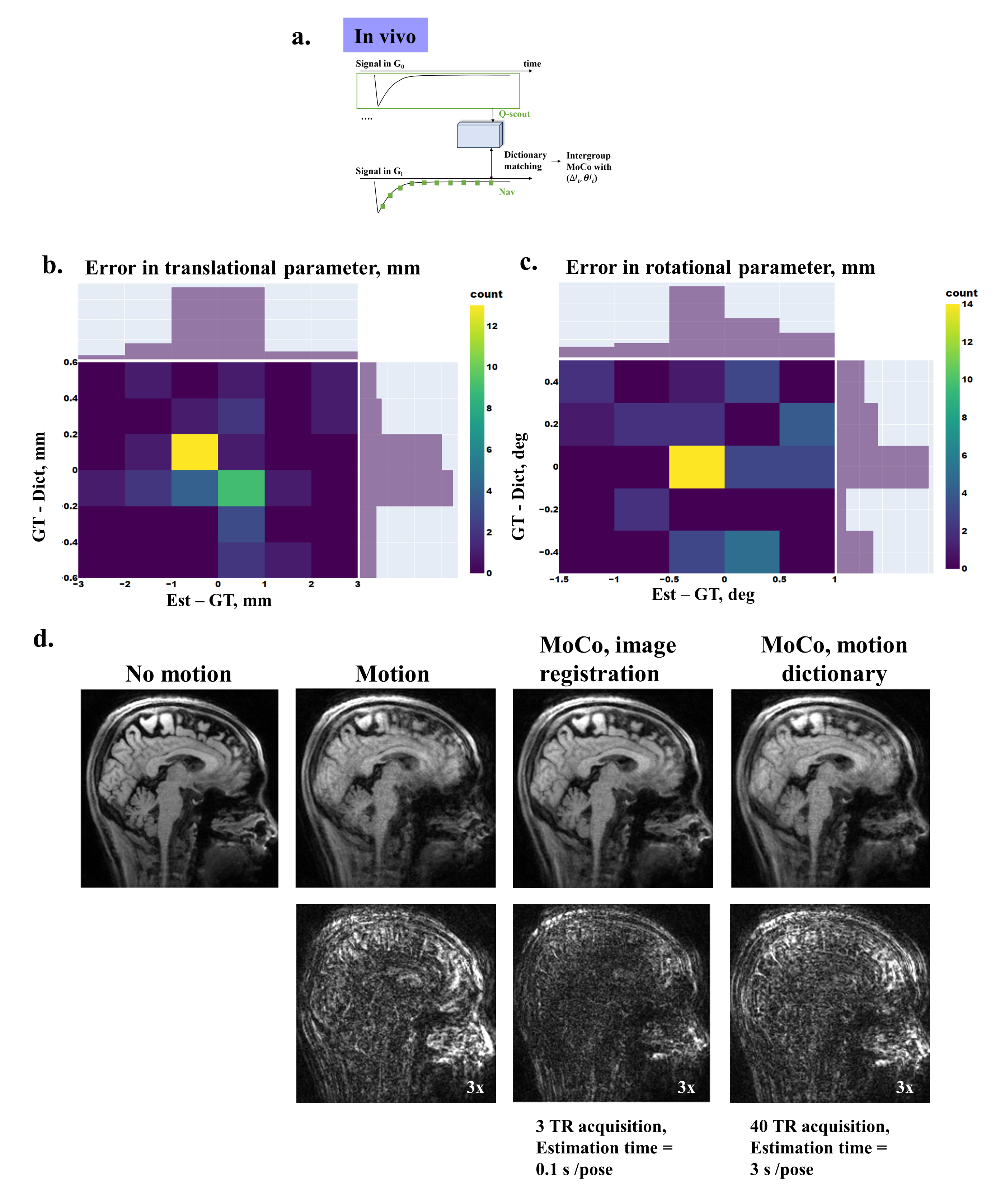
Results: The estimated in vivo motion parameters have MAE of 0.4 mm and 0.2 deg compared to image registration estimates.
Impact: The proposed method can achieve high temporal resolution motion estimates, and therefore, is a promising approach for high-precision motion correction in MRF.
Introduction/Background
Motion estimation and correction approaches in MRF by using either additional navigators inserted into the sequence deadtime1 or registration of sliding window reconstruction2 have been shown to improve imaging-robustness in motion-prone population. However, the temporal resolution of such an approach is limited to 6-10 s, which can be slow for fast movements. Compact navigators3,4, 5,6,7 have shown to be effective at estimating motion by correlating the measured navigator signal in time. Recently, it has been demonstrated that the QUantitatively-Enhanced parameter Estimation from Navigators (QUEEN) approach with contrast-resolved scout and SPINS navigator can estimate motion and B0-perturbation at a high temporal resolution for non-steady-state sequences8. In this work, the QUEEN approach is integrated into the MRF acquisition, where motion-dictionary matching is used to estimate motion-parameters at a temporal-resolution of 0.5 s with neglectable cost to MRF’s encoding efficiency (~5%).Methods
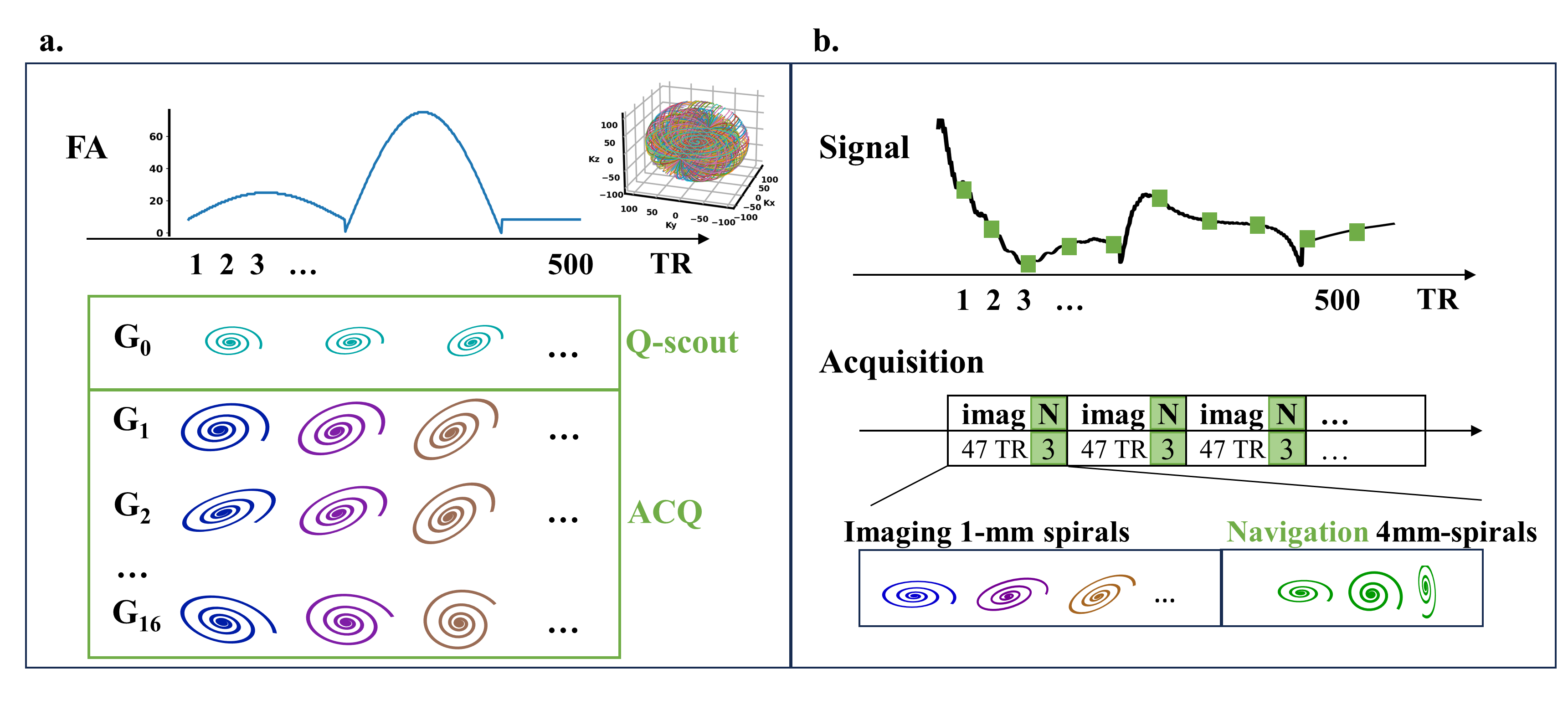
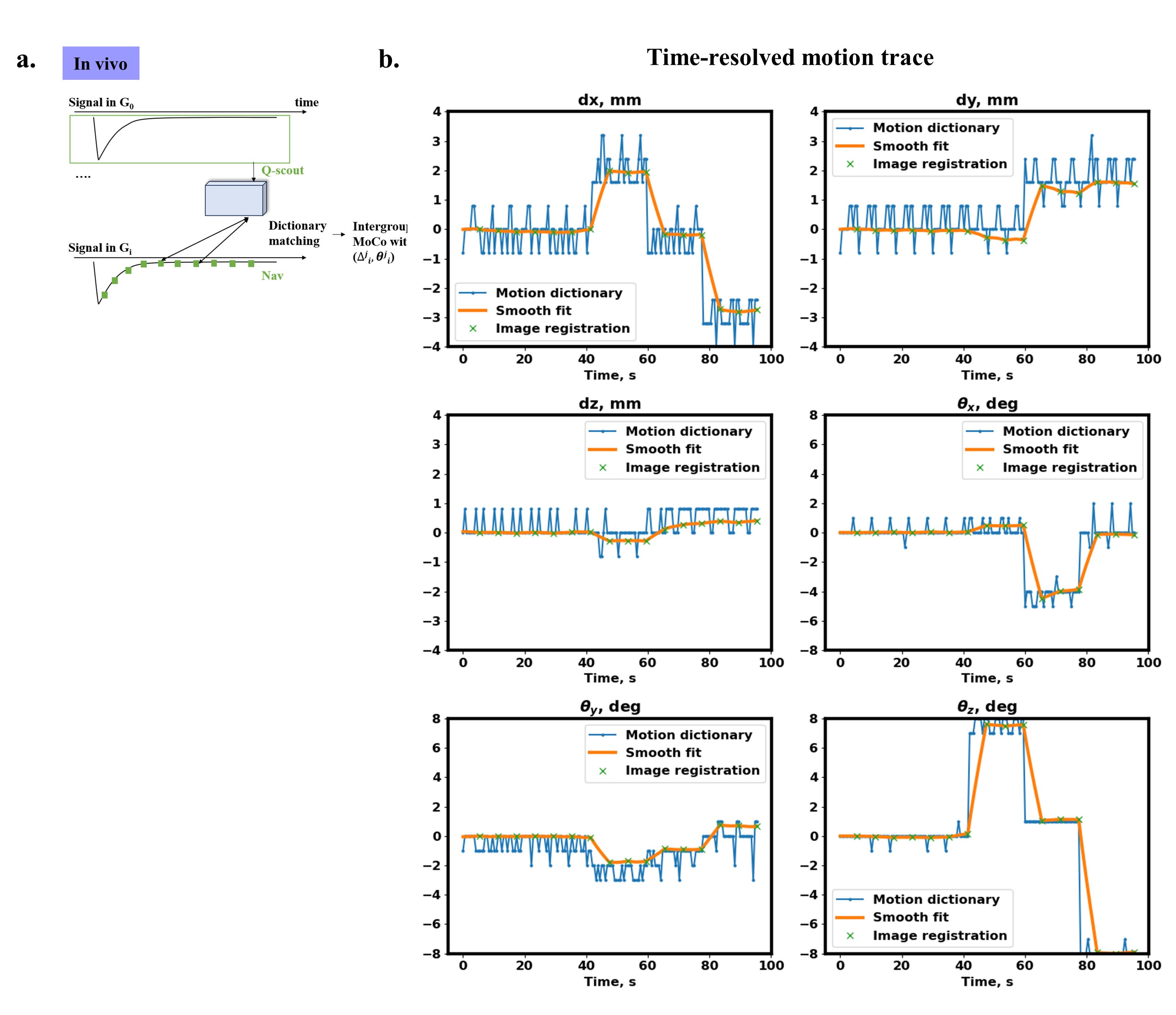
Acquisition: 3D-MRF acquisition based on multi-axis spiral-projection spatiotemporal encoding9 was used to acquire 1-mm isotropic resolution whole- brain scans in 2 minutes. Each measurement contained 16 acquisitional groups and each acquisition group consisted of 500 TRs at varying flip angles (Figure 1a.). Subspace reconstruction with locally low-rank constraint was used.Figure 1a demonstrates incorporation of the QUEEN approach into MRF. Quantitative scout (Q-scout), i.e. tissue parameter maps, was used to synthesize contrast-informed k-space data at any TR. To enable Q-scout scan for MRF with no added time, the dummy scan prior to the MRF acquisition reaching its steady state (0th acquisition group G0, Tacq = 7s) was repurposed to also obtain 4-mm quantitative maps using fast 3D-MRF acquisition across 500 TRs.
For motion navigation, three orthogonal 4 mm-resolution spirals in x-, y- and z-planes were incorporated into the MRF acquisition every 50 TRs to achieve 0.5s temporal rate of motion-estimation (Figure1b).
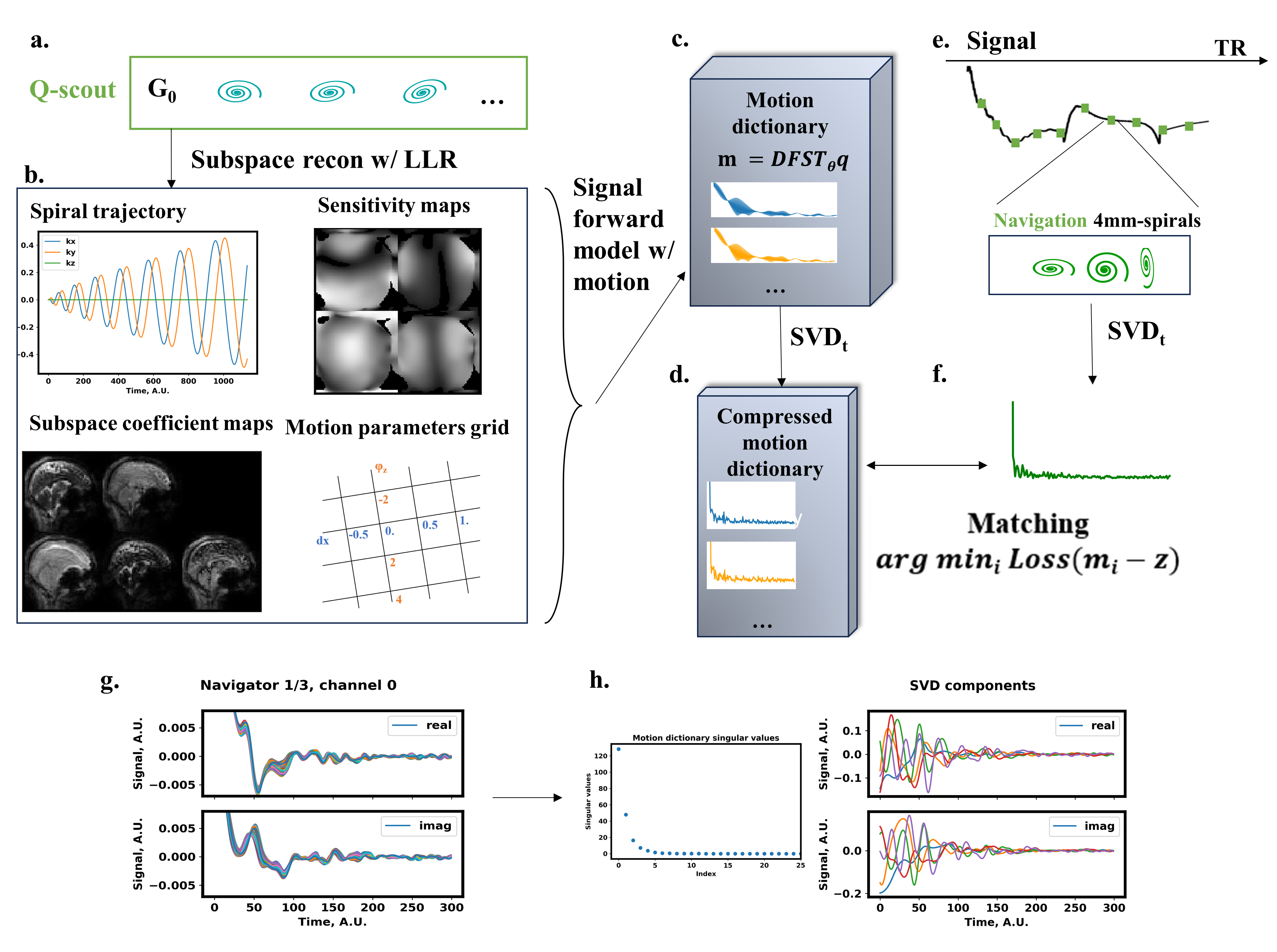
Quantitative scout together with compressed coil sensitivity maps, navigator spiral trajectory and motion parameters grid were used for motion dictionary generation according to the forward MR model in the presence of motion (Figure 2c). Motion parameters with translations within +- 4mm and stepsize 0.8mm, and rotations between +-15° with stepsize 1° were simulated (~1.3 million combinations). Dictionary generation takes 2h. The pre-computed dictionary was highly compressible (Figure 2g-h.). Random subset SVD was performed to 100x compress the dictionary. The compressed navigator signal size was 50 timepoint at 8 compressed coil channels (Figure 2d). The SVD compression time is 1-2mins.
Acquired spiral navigator signals were compressed using the same transformation as for the motion dictionary and matched to the pre-computed dictionary by minimizing normalized dot-product. To reduce mismatch between predicted k-space and in vivo signals, G1 with zero-motion was used for normalizing the acquired navigator signals. Dictionary matching took 0.1 seconds per pose.
To get reference motion estimates at each acquisitional group (every 7s), 4 mm images were acquired during 40 TRs at the end of each group. Low-resolution images were reconstructed with L1-regularized non-Cartesian SENSE10,11 and registered using AFNI12.
Estimated rigid motion parameters were used for correcting the full resolution k-space data and spiral trajectories before LLR-reconstruction.
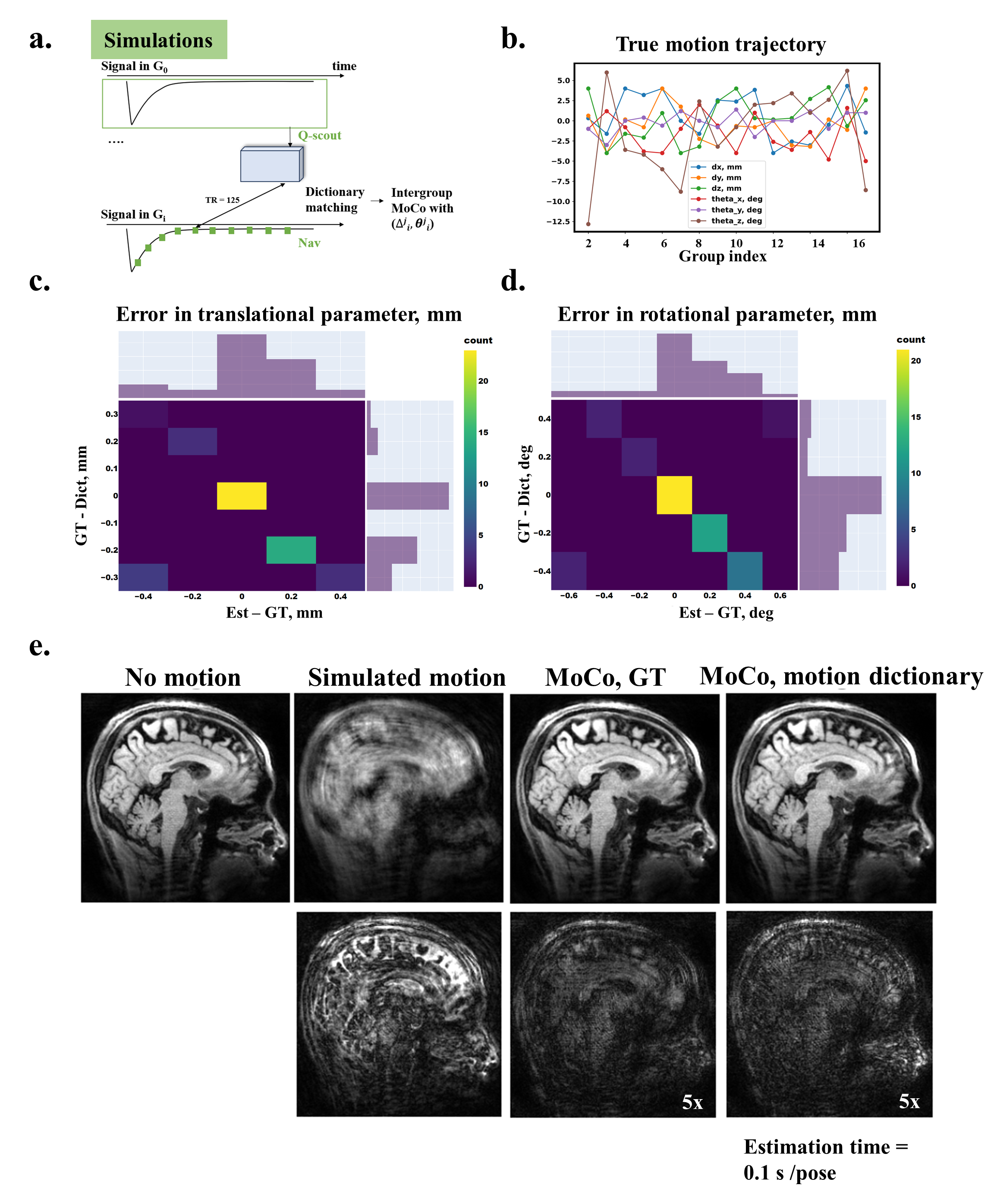
Simulations were performed to assess the precision of dictionary matching with additive 5% gaussian noise when input motion parameters were within and outside of the defined motion parameters grid in the dictionary. In vivo motion estimation and correction was shown on data with involuntary motion of a healthy subject.
Results
Motion estimation from the simulated spiral navigator signal with additive noise in Figure 3c-d indicates that the estimation errors are mainly from the discrete motion grid. Motion estimated from dictionary matching have MAE of 0.03 mm and 0.2° compared to the GT. In vivo motion estimation was performed intergroup with provided GT registration estimates (Figure 4). Parameters from motion dictionary matching have MAE of 0.4mm and 0.2° and improve the quality of time-resolved images although to lesser extend as image registration estimates. Figure5 presents preliminary results on time-resolved motion every 50 TRs throughout the in vivo acquisition.Discussion/Conclusion
We presented a fast contrast-informed motion estimation for MRF using quantitative scout and motion-dictionary matching. Advantages of the presented method are the ability to time-resolve motion at a high temporal rate even with rapidly varying contrast, as well as the estimation speed reaching 0.1 s/pose, offering potential for real-time motion update. The possible disadvantages of the method are the limitations in precision due to dictionary discretization. Also, motion dictionary generation takes around 2 hours with the initial implementation. Finite parameters in the dictionary and the compute time will be tackled by replacing the generation with neural networks.Acknowledgements
No acknowledgement found.References
- Hu, S, Chen, Y, Zong, X, Lin, W, Griswold, M, Ma, D. Improving motion robustness of 3D MR fingerprinting with a fat navigator. Magn Reson Med. 2023; 90(5): 1802-1817. doi: 10.1002/mrm.29761
- Cruz, G., Jaubert, O., Schneider, T., Botnar, R. M., & Prieto, C. (2019). Rigid motion-corrected magnetic resonance fingerprinting. Magnetic Resonance in Medicine, 81(2), 947–961. https://doi.org/10.1002/mrm.27448 van der Kouwe, A. J. W., Benner, T., & Dale, A. M. (2006).
- Real-time rigid body motion correction and shimming using cloverleaf navigators. Magnetic Resonance in Medicine, 56(5), 1019–1032. https://doi.org/10.1002/mrm.21038
- Ulrich, T., Patzig, F., Wilm, B. J., & Pruessmann, K. P. (n.d.). Towards Optimal Design of Orbital K-Space Navigators for 3D Rigid-Body Motion Estimation. h
- Polak, D., Hossbach, J., Splitthoff, D. N., Clifford, B., Lo, W. C., Tabari, A., Lang, M., Huang, S. Y., Conklin, J., Wald, L. L., & Cauley, S. (2023). Motion guidance lines for robust data consistency–based retrospective motion correction in 2D and 3D MRI. Magnetic Resonance in Medicine, 89(5), 1777–1790. https://doi.org/10.1002/mrm.29534
- Wallace, T. E., Afacan, O., Waszak, M., Kober, T., & Warfield, S. K. (2019). Head motion measurement and correction using FID navigators. Magnetic Resonance in Medicine, 81(1), 258–274. https://doi.org/10.1002/mrm.27381
- Wallace, T. E., Afacan, O., Kober, T., & Warfield, S. K. (2020). Rapid measurement and correction of spatiotemporal B0 field changes using FID navigators and a multi-channel reference image. Magnetic Resonance in Medicine, 83(2), 575–589. https://doi.org/10.1002/mrm.27957
- Brackenier Y., Wang N., Liao C. , Cao X., Schauman S. , Yurt M. , Cordero-Grande L., Malik S.J. , Kerr A., Hajnal J.V., and Setsompop K. (2022). Towards rapid and accurate navigators for motion and B estimation using QUEEN (QUantitatively-Enhanced parameter Estimation from Navigators)
- Cao, X., Liao, C., Iyer, S. S., Wang, Z., Zhou, Z., Dai, E., Liberman, G., Dong, Z., Gong, T., He, H., Zhong, J., Bilgic, B., & Setsompop, K. (2022). Optimized multi-axis spiral projection MR fingerprinting with subspace reconstruction for rapid whole-brain high-isotropic-resolution quantitative imaging. Magnetic Resonance in Medicine, 88(1), 133–150. https://doi.org/10.1002/mrm.29194 Cox RW (1996).
- AFNI: software for analysis and visualization of functional magnetic resonance neuroimages. Comput Biomed Res 29(3):162-173. doi:10.1006/cbmr.1996.0014 https://pubmed.ncbi.nlm.nih.gov/8812068/
- Pruessmann, K.P., Weiger, M., Scheidegger, M.B. and Boesiger, P. (1999), SENSE: Sensitivity encoding for fast MRI. Magn. Reson. Med., 42: 952-962. https://doi.org/10.1002/(SICI)1522-2594(199911)42:5<952::AID-MRM16>3.0.CO;2-S
- SigPy MRI signal processing package: https://github.com/mikgroup/sigpy
Figures