0388
Navigator based prospective motion correction in short TR sequences with minimal scan time penalty1Clinical Neuroscience, Karolinska Institutet, Stockholm, Sweden, 2Clinical Neuroscience, Karolinska University Hospital, Stockholm, Sweden, 3MR Applied Science Laboratory Europe, GE Healthcare, Munich, Germany
Synopsis
Keywords: Motion Correction, Motion Correction
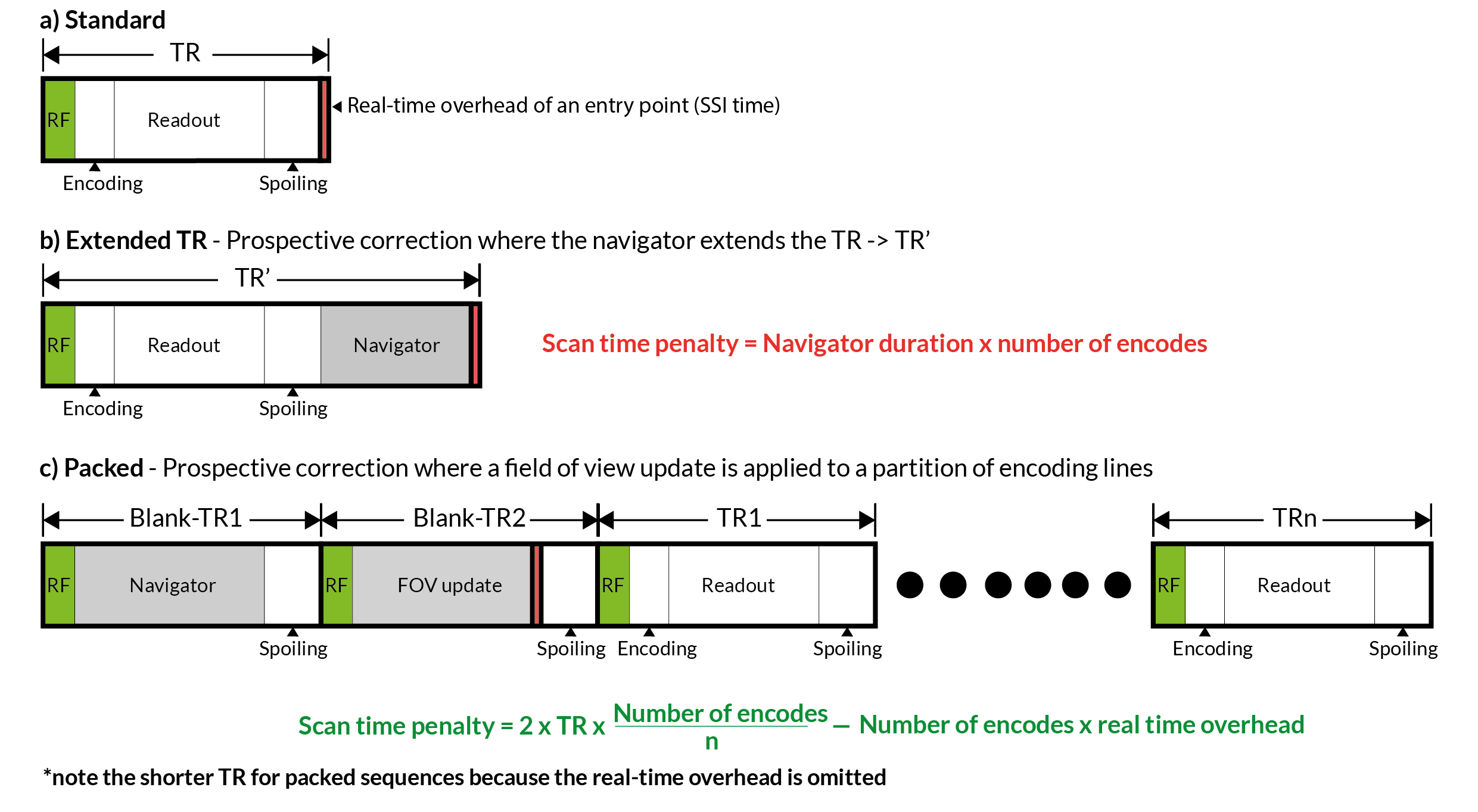
Motivation: Inserting navigators into short-TR gradient echo pulse sequences increases scan duration as the TR needs to be extended to maintain a steady-state.
Goal(s): Periodically interleave navigators without disrupting stead-state.
Approach: A packed pulse sequence encoding was implemented that divides the phase encoding table into partitions. Each partition begins with two blank-TRs that contain identical RF and spoiling to the parent sequence. The first blank-TR readout is replaced with a navigator acquisition. The second is replaced with computation time to perform a field of view update.
Results: The packed sequences reduced the time penalty from 1-minute to 3-13 seconds, without impacting motion correction efficacy.
Impact: The packed sequence structure allows researchers to augment the acquisition of short-TR GRE sequences with fast (<TR) navigators for almost no additional scan time without affecting motion correction efficacy, and is applicable to all sequences where the TR is minimised.
Introduction
For short duration gradient echo pulse sequences, the image formation is continuous with periodic RF pulses and spoiling that maintain a steady-state of the magnetisation. Randomly inserting navigator acquisitions would disrupt steady-state. Fast k-space1,2 or FID3 navigators are therefore typically inserted once per repetition to maintain periodicity, extending the TR. Even though these navigators are only a few milliseconds long they can significantly impact the total scan duration when the desired TR is short. Navigator designs therefore need to be highly optimised for duration, which can impact their precision and consequently limit the obtainable image resolution due to measurement noise. In this work we evaluate the efficacy of periodically interleaving navigators with a GRE-sequence by inserting them into so-called “blank-TRs”. The blank-TRs contain identical RF pulse and spoiling to the parent GRE sequence, however a navigator signal is acquired instead of a line in k-space.Methods
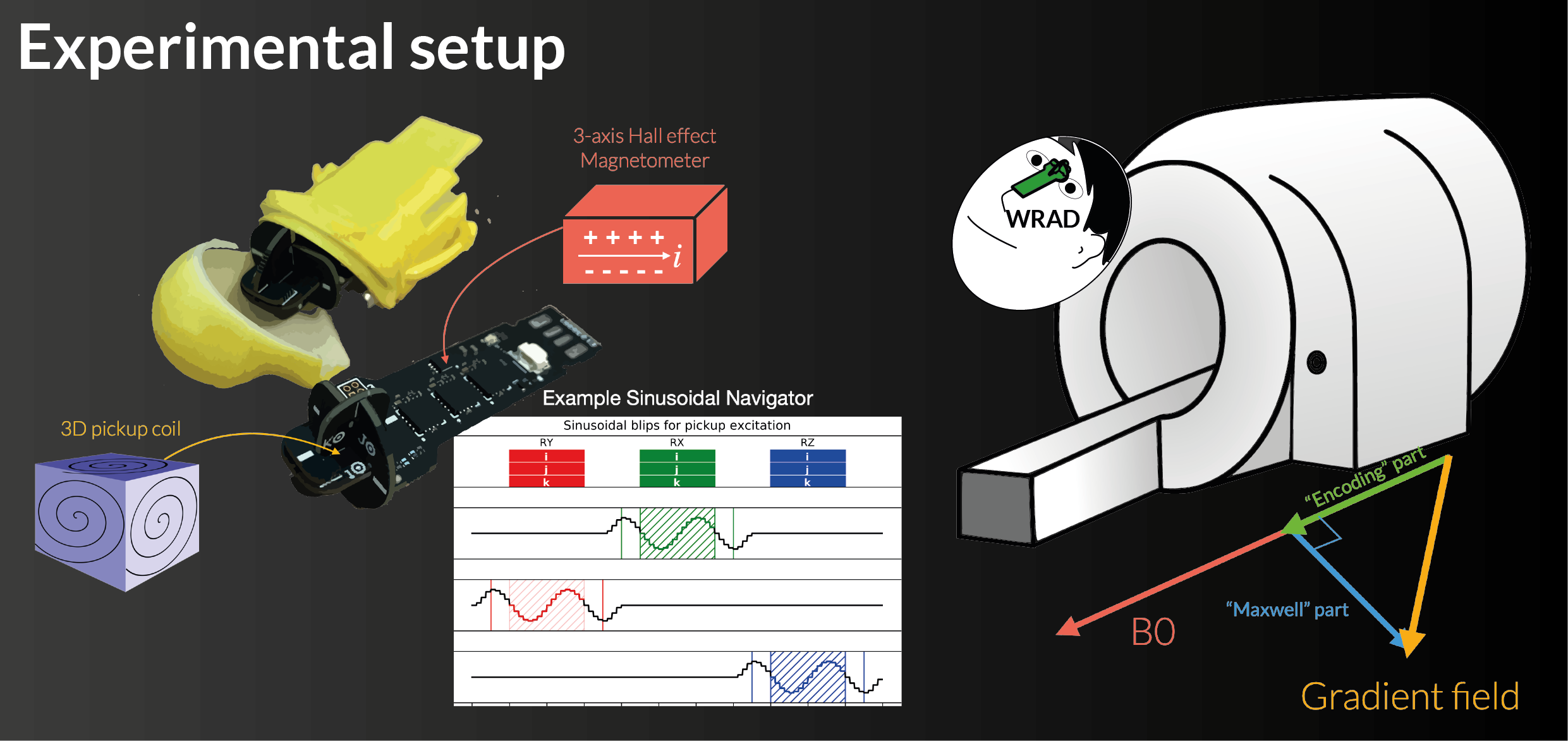
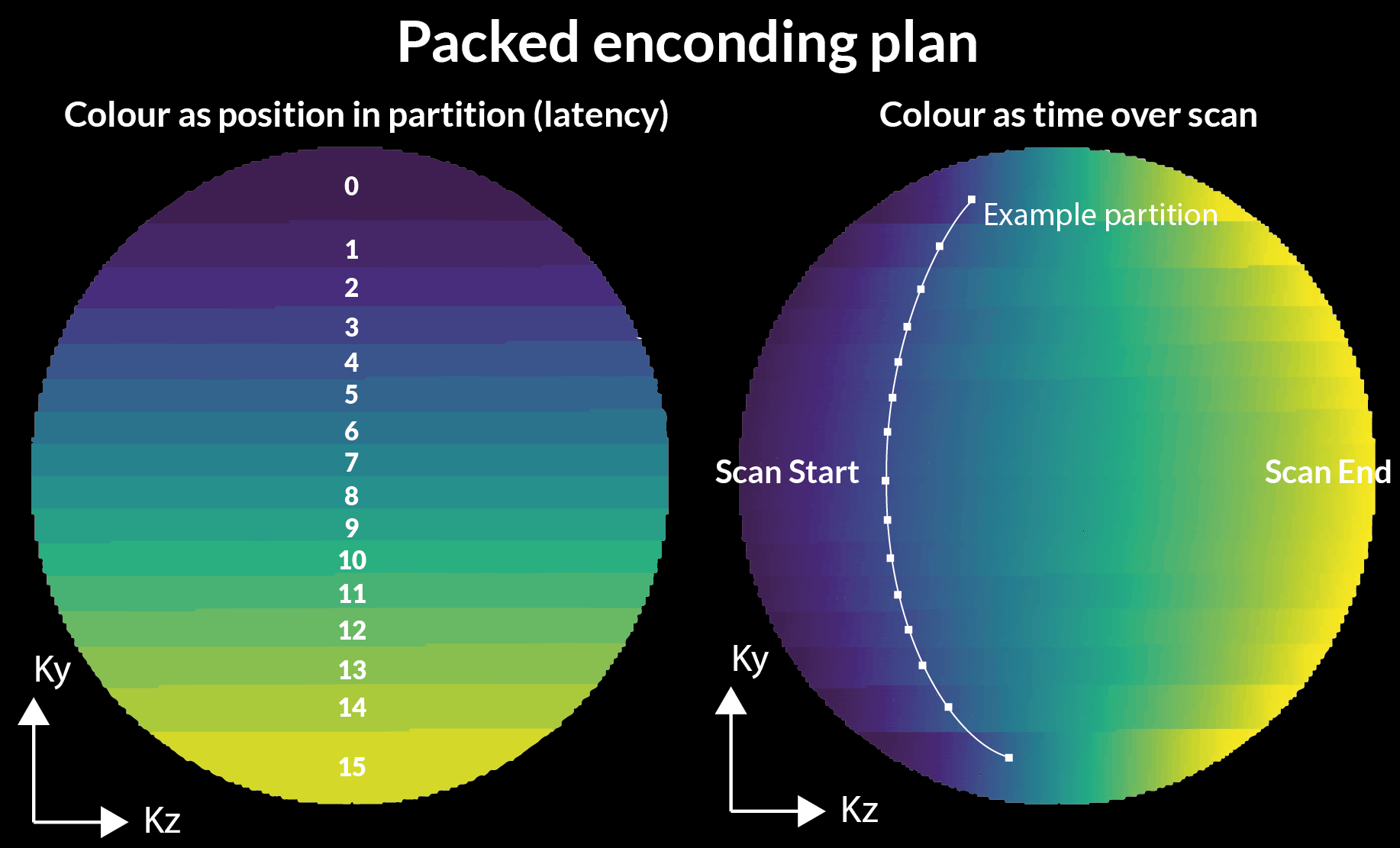
A 3D spoiled gradient echo pulse sequence was modified to acquire partitions of the phase encoding table, similar to acquiring a shot in echo-planar-imaging or turbo-spin-echo imaging. For the remainder of this abstract this is referred to as a “packed” sequence. Each partition contains two blank-TRs (Figure 1):- The first blank-TR contains a navigator. In our case this is a sinusoidal navigator (2ms) for encoding the pose of a Wireless Radiofrequency-triggered Acquisition Device (WRAD4, Figure 2). One navigator is acquired for each partition. The period between pose measurements can then be controlled by adjusting the number of encoding lines (TR1..TRn) acquired in each partition.
- The second blank-TR is used as feedback and computation time for updating the waveforms of the subsequent TRs to realise an updated field of view pose. The first regular TR in each partition therefore has the lowest latency. The larger each partition the less scan time penalty, at the expense of increased latency of motion updates for later TRs.
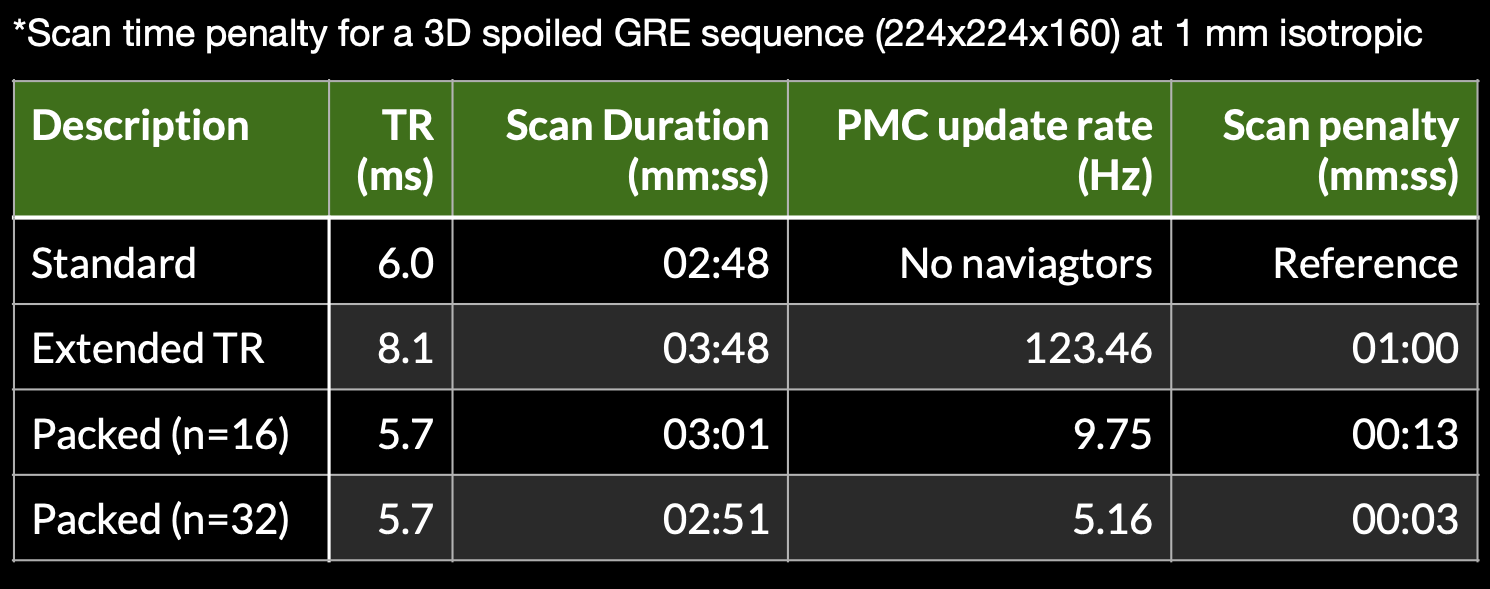
A clinical protocol with 1 mm3 isotropic voxels, 1.5 ms wide non-selective RF pulse for fat suppression, and a FOV of 224x224x160 (BW 50 kHz) was used as a reference. The effect on scan time was then evaluated by setting up four protocols:
- Standard - no navigator
- Extended TR - one navigator per readout
- Packed (n=16) - each partition contains 16 TRs (and 2 blank-TRs)
- Packed (n=32) - each partition contains 32 TRs (and 2 blank-TRs)
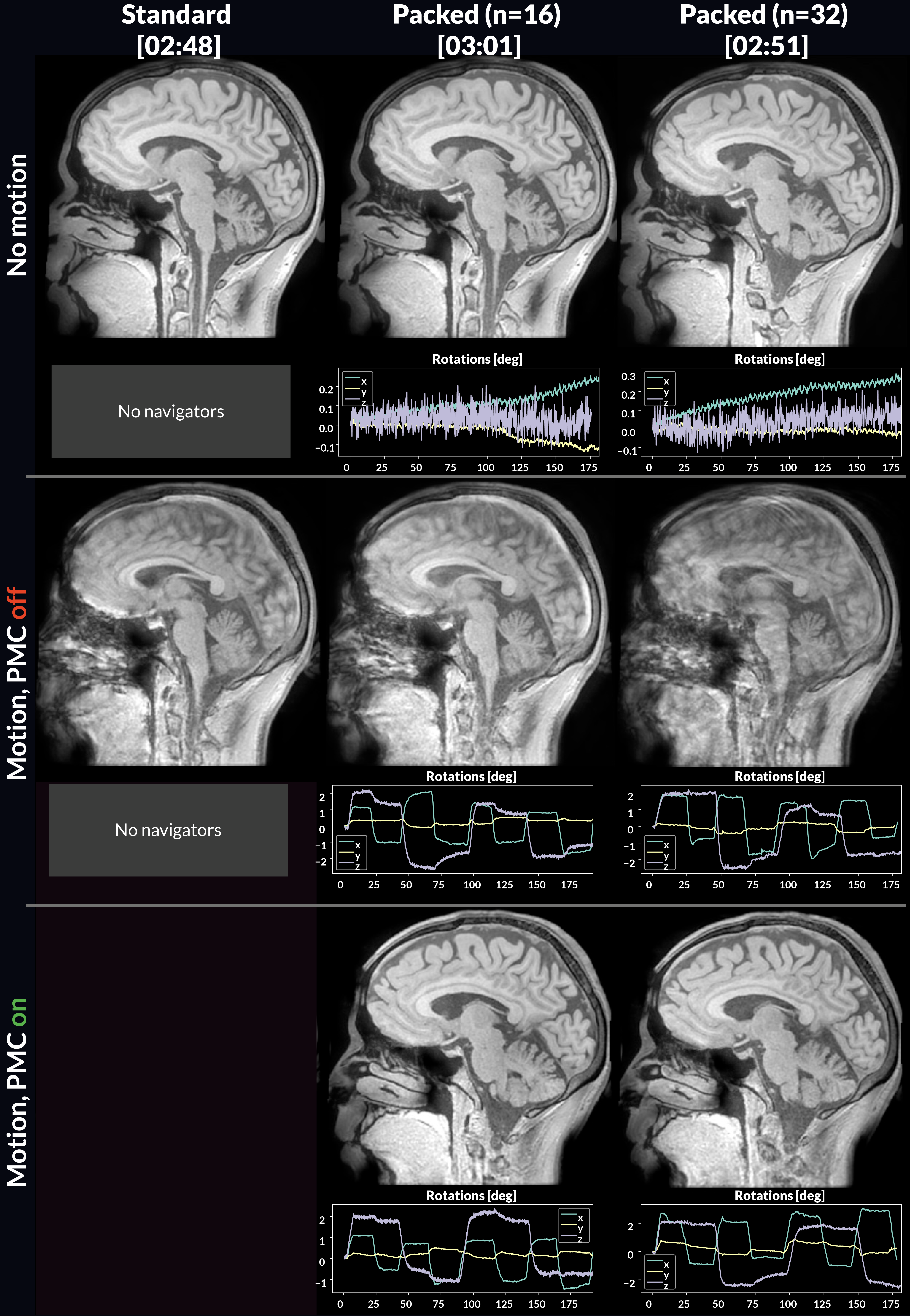
Each pulse sequence packing level (n=16, n=32) was repeated three times on a volunteer. Once without motion, then twice with instructed movements every ~15 seconds, with and without prospective motion correction (PMC) updates applied.
Results
The additional time required for including navigators was reduced from 1-minute (extended TR) to 3-seconds (n=32) and 13-seconds (n=16) for packed sequences (Figure 4). This comes at the cost of reducing the FOV update rate from 123 Hz down to 5.16 Hz (n=32) and 9.75 Hz (n=16).There was no visible impact on image quality between packed and standard sequences when the participant remained still (Figure 5). An indistinguishable image series from the reference was acquired during motion with PMC enabled at a packing level of n=16. For n=32, we noted a subtle reduction in SNR likely due to the slower update rate.Discussion
Packed sequences can significantly reduce the time penalty of navigators in short-TR GRE pulse sequences without impacting motion correction efficacy.Acknowledgements
This project received grant support though Barncancerfonden (MT2020-0006) and research support through GE healthcare.
References
1) Prospective Head Motion Correction Using Orbital K-Space Navigators and a Linear Perturbation Model, Thomas Ulrich et al, ISMRM22, https://archive.ismrm.org/2022/0353.html
2) van der Kouwe AJ, Benner T, Dale AM. Real-time rigid body motion correction and shimming using cloverleaf navigators. Magn Reson Med. 2006 Nov;56(5):1019-32. doi:10.1002/mrm.21038 PMID: 17029223.
3) Wallace, TE, Kober, T, Stockmann, JP, Polimeni, JR, Warfield, SK, Afacan, O. Real-time shimming with FID navigators. Magn Reson Med. 2022; 88: 2548-2563. doi:10.1002/mrm.29421
4) van Niekerk, A, van der Kouwe, A, Meintjes, E. Toward “plug and play” prospective motion correction for MRI by combining observations of the time varying gradient and static vector fields. Magn Reson Med. 2019; 82: 1214–1228. https://doi.org/10.1002/mrm.27790
Figures