0386
AI-based motion estimation in k-space using guidance lines enables scoutless prospective motion correction.1Pattern Recognition Lab, Friedrich-Alexander-University Erlangen-Nuremberg, Erlangen, Germany, 2Siemens Healthcare GmbH, Erlangen, Germany, 3Siemens Medical Solutions, Boston, MA, United States, 4Department of Radiology, Athinoula A. Martinos Center for Biomedical Imaging, Boston, MA, United States, 5Advanced Clinical Imaging Technology Group, Siemens Healthcare International AG, Lausanne, Switzerland, 6Harvard Medical School, Boston, MA, United States, 7Harvard-MIT Health Sciences and Technology, Boston, MA, United States
Synopsis
Keywords: Motion Correction, Motion Correction, Prospective, motion estimation
Motivation: Novel research reduced the acquisition of motion navigators to a few guidance lines. A prospective correction is not yet possible due to reconstruction and optimization times.
Goal(s): We determine the feasibility of a fast AI-based motion estimation for prospective correction in a 3D MPRAGE research sequence.
Approach: A DL network to prospectively estimate the head pose from seamlessly integrated guidance lines in a 3D MPRAGE research sequence was trained on simulated data and used for a rapid adaption of the FOV to achieve a prospective correction.
Results: In-vivo experiments showed greatly reduced motion artifacts. The motion estimation is accurate and stable.
Impact: Prospectively adapting the FOV using the proposed AI-based method greatly improves the image quality of 3D MPRAGE acquisitions. This unique application of ML enables promising research of prospectively mitigating motion artifacts with minimal changes to the sequence.
Introduction
Prospective motion correction adapts the FOV to follow the subject’s head movements during the acquisition. Advantages are the minimized k-space gaps caused by rotations and that a standard reconstruction can be used. Furthermore, it avoids time delays caused by retrospective motion correction1.Recently motion guidance lines2 (GL) were proposed to efficiently encode the subject motion in 4 additional lines for MPRAGE acquisitions. In this prior work, the GL are retrospectively registered against a previously acquired and reconstructed scout image of matching contrast. Despite a fast estimation, the time for the scout reconstruction and motion parameter search limits a prospective application.
Lately, we introduced MoPED, a fast, purely k-space data driven, AI-based approach to estimate the motion parameters for a data consistent motion correction3. MoPED was shown to also work for contrast differences between scout and imaging scan4.
In this proof of concept, we combine a MoPED-like Neural Network (NN) with the idea of GL to extract the subject pose per echo train (ET). We remove the need of coil sensitivity maps calculations and of an additional scout image acquisition and reconstruction; instead, the already acquired parallel imaging reference scan (PATRefScan) is used as a replacement.
The network exclusively operates in k-space and allows an on-the-fly adaption of the FOV to prospectively mitigate motion artifacts without any additional hardware.
Methods
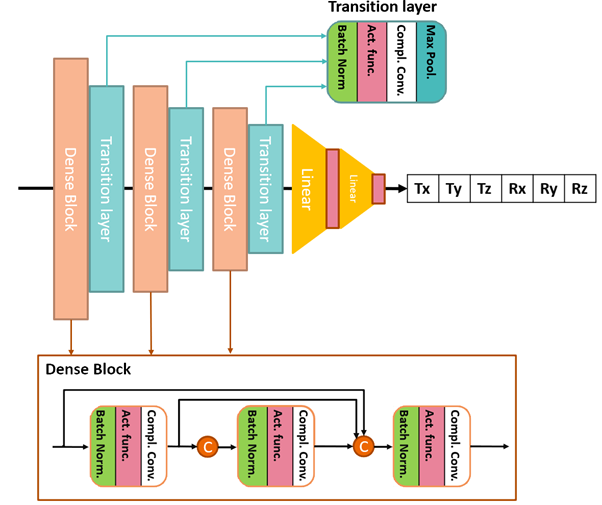
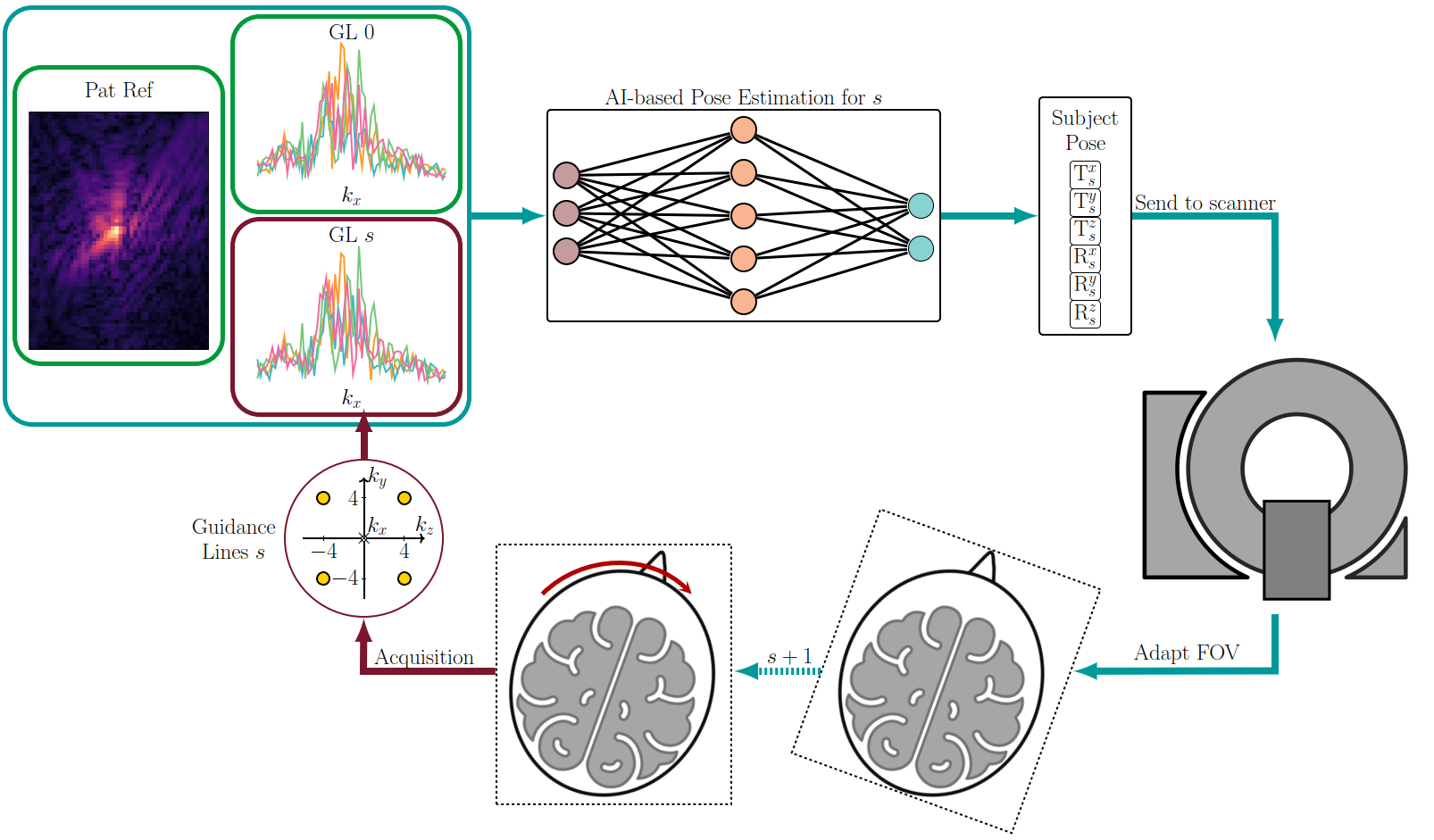
The network architecture is depicted in Figure 1 and receives 3 inputs: the GL of the first ET and the PATRefScan prescribe the motion-free pose; the current GL represent the pose in question. During preprocessing, the GLs and PATRefScan are coil compressed and the GLs are repeated in each quadrant of ky and kz to match the network input shape (32x16x16x4).The pose extracted by the network is utilized by the scanner to adapt the FOV by updating the gradients and frequency settings immediately after the estimation (Figure 2).
For training, we used 55 3D MPRAGE data sets of a clinical study acquired with a research application SAMER5 sequence acquired on 3T MAGNETOM Skyra and Prisma scanners (Siemens Healthcare, Erlangen, Germany) with the following parameters: resolution 1x1x1mm, acceleration factor: 2x2, turbo factor: 192, TE: 3.5ms, TI: 1100ms, TR: 2500ms, FOV: 256x256x192mm, bandwidth: 200Hz/pixel. The acquisition time was 2 minutes 40 seconds. The GRE PATRefScan has a matrix size of 64x48x38. We simulated around 150,000 instances combined using augmentation for the training.
We integrated the MoPED approach into a SAMER research application and compared the proposed method applied retrospectively to the scout-driven SAMER method. For this purpose, the SAMER reconstruction was used separately with the motion values obtained by MoPED and the ones obtained by the original SAMER approach.
Next, we tested the prospective motion correction on 2 subjects performing different head motion patterns acquired on a 3T MAGNETOM Cima.X Fit (Siemens Healthcare, Erlangen Germany) and lastly, we investigated the compatibility to SAMER.
Results
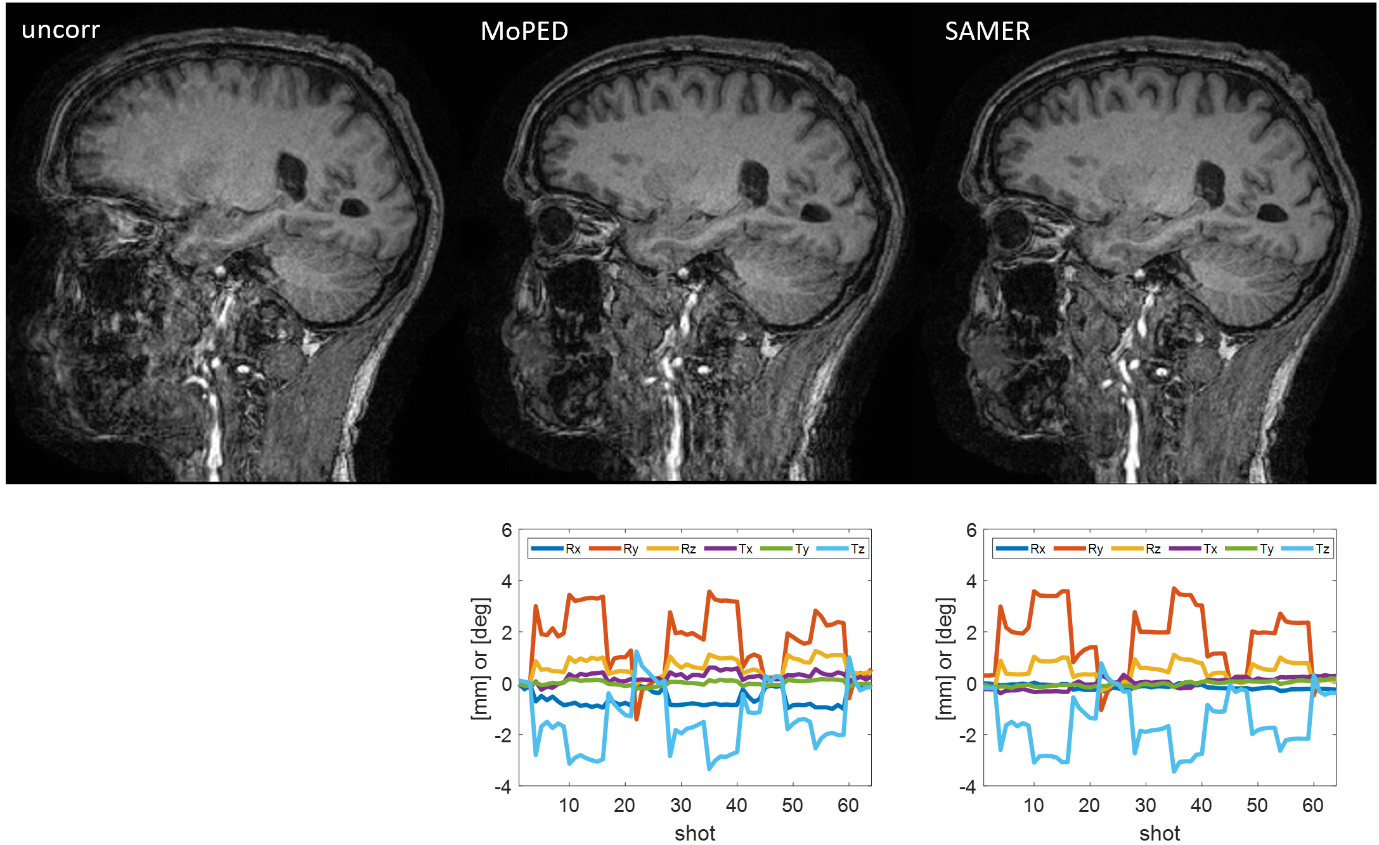
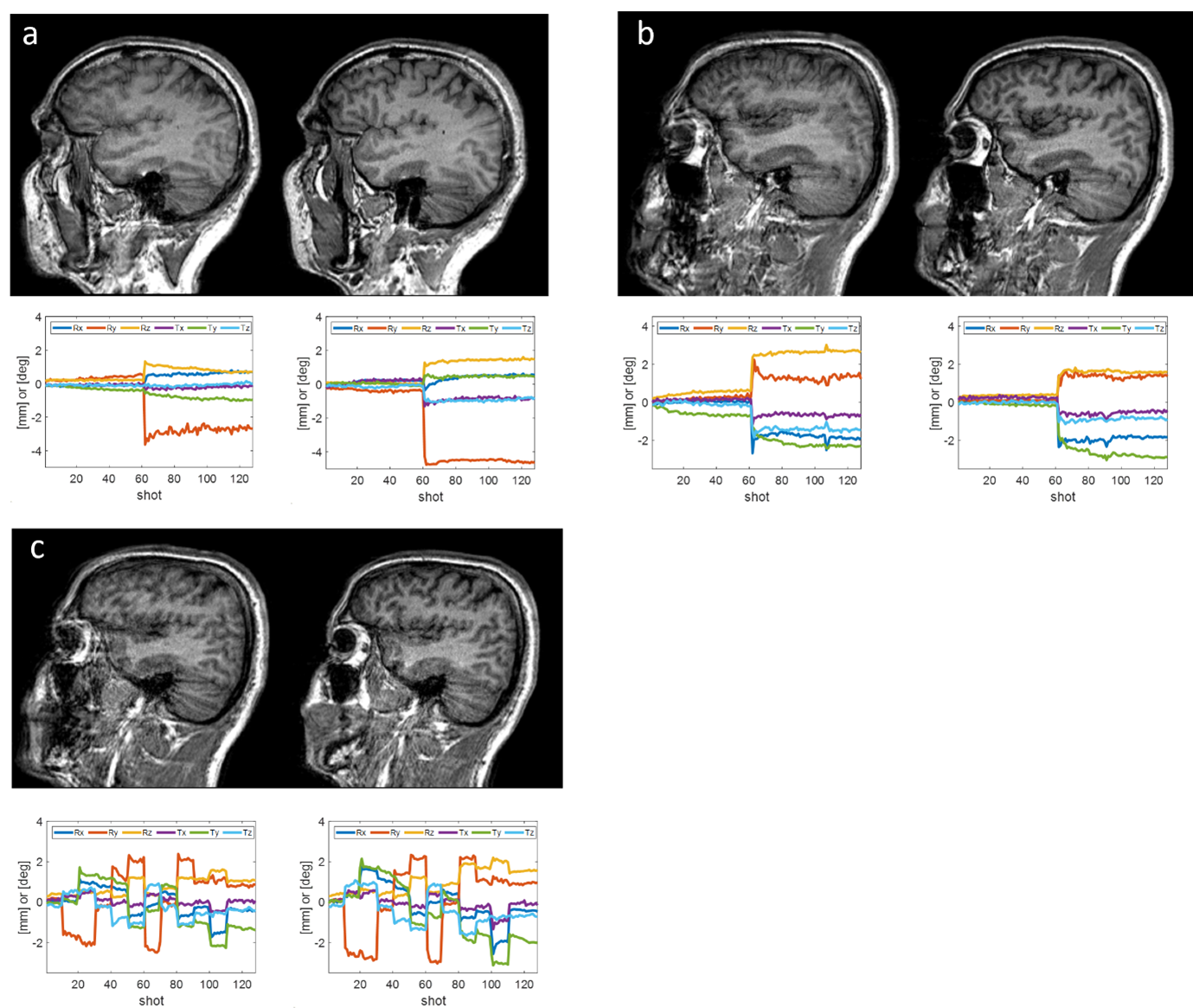
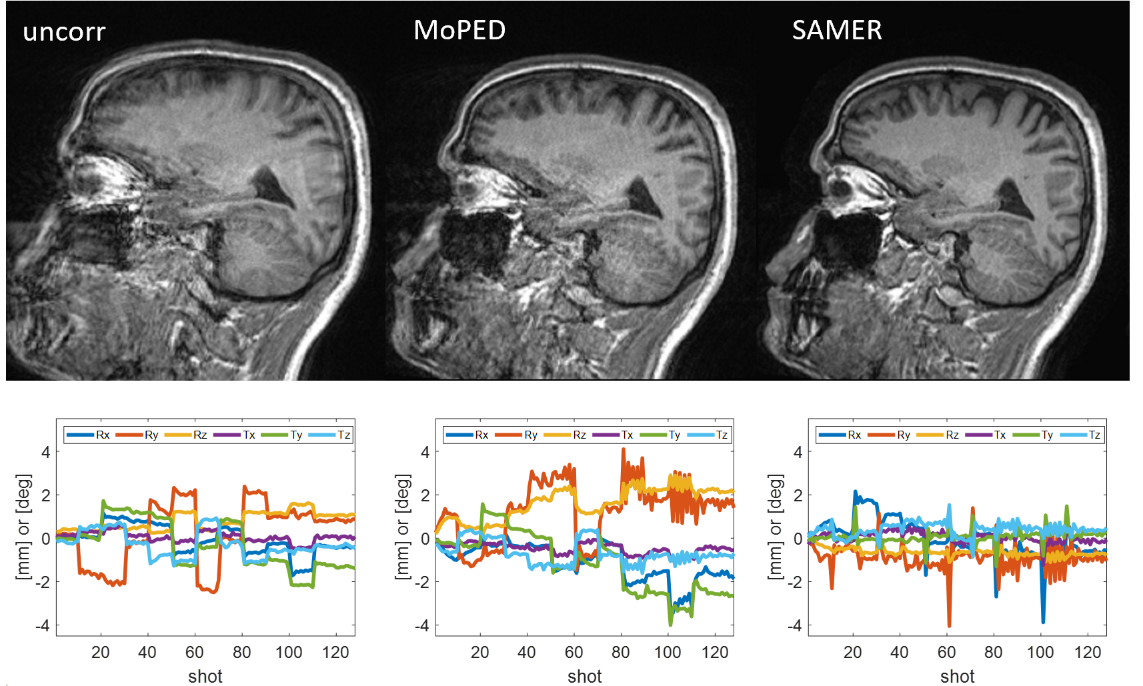
In Figure 3 the retrospective motion correction results of our method are compared with SAMER for an in-vivo example, showing that MoPED finds very similar motion trajectories as SAMER. The prospective 3D MPRAGE experiments are evaluated in Figure 4, showing a good correction performance; Figure 5 demonstrates the compatibility with SAMER, in case of residual artifacts. The time for estimating one pose is approximately 7.2ms with around 4ms latency of application on the vendor’s measurement and reconstruction system.Discussion
The results demonstrate the feasibility of prospective motion correction using AI motion estimation in k-space, without any need for image intermediate reconstructions. The rapid estimation time allows for an almost instant correction within the same ET. Using SAMER, the estimation results can be further improved. The presented approach allows for prospectively closing k space gaps caused by motion. Demonstrating this aspect in more detail will be part of future work.Acknowledgements
No acknowledgement found.References
1 Maclaren, J., Herbst, M., Speck, O. et al. Prospective motion correction in brain imaging: A review. Magn Reson Med, 2013; 69:621-636
2 Polak D, Hossbach J, Splitthoff DN, et al. Motion guidance lines for robust data consistency-based retrospective motion correction in 2D and 3D MRI. Magn Reson Med, 2023 May;89(5):1777-1790
3 Hossbach J, Splitthoff D, Cauley S, et al. Deep Learning-Based Motion Quantification from k-space for Fast Model-Based MRI Motion Correction. Med Phy, 2023; 50:2148–2161
4 Hossbach J, Splitthoff D, Clifford B, et al. Think outside the box: Exploiting the imaging work ow for Deep Learning based motion estimation and correction. ISMRM 2022 #1952
5 Lang M, Tabari A, Polak D, et al. Clinical Evaluation of Scout Accelerated Motion Estimation and Reduction Technique for 3D MR Imaging in the Inpatient and Emergency Department Settings. AJNR Am J Neuroradiol., 2023 Feb;44(2):125-133
Figures