0354
SISMIK: Search In Segmented Motion Input in K-space1University of Geneva, Geneva, Switzerland, 2EPFL, Geneva, Switzerland
Synopsis
Keywords: AI/ML Image Reconstruction, Machine Learning/Artificial Intelligence, k-space, motion, artifacts, quality metric
Motivation: Motion correction in MRI predominantly relies on image-based methods and continues to be a challenge. Innovative approaches could harness better motion information latent in k-space (i.e., the measurement space).
Goal(s): Developing a reference-less motion correction pipeline in k-space using deep learning.
Approach: Our k-space motion correction pipeline combines deep learning for motion parameter estimation with model-based image reconstruction. Large datasets were generated through physics-based simulations on 2D brain MRI acquisitions to enhance model training and performance.
Results: Our deep-learning model performs well in motion parameter estimation, even for successive motion events, effectively removing substantial motion artifacts when combined with model-based reconstruction.
Impact: SISMIK, our deep learning model successfully estimates motion parameters in the acquisition space of multi-slice 2D brain MRI. It allows substantial motion artifact removal through a model-based reconstruction approach, which is, by design, free of hallucination artifacts.
Introduction
Motion correction remains an open problem in MRI and no universal solution exists.1 We propose a deep learning-based approach to estimate motion parameters in k-space of MRI brain scans followed by a model-based method for image reconstruction. Our approach takes advantage of motion event localization in k-space, as opposed to being distributed everywhere in image space. We also introduce a novel k-space quality metric for assessing the k-space degradation caused by motion. Key features of SISMIK include its ability to estimate motion parameters across a wide range of spatial frequencies, even in low SNR regions, and its capacity to do so without a motion-free reference. Our method extracts relative motion information from neighboring k-space regions, foregoing reference scans and thus outperforming prior techniques2.Methods
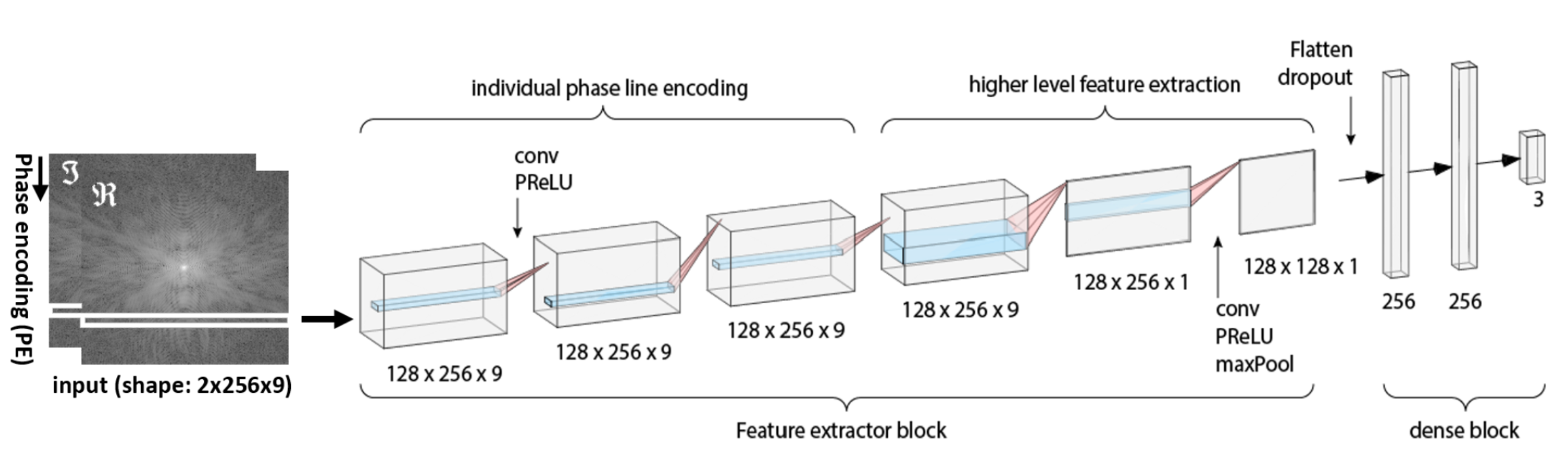
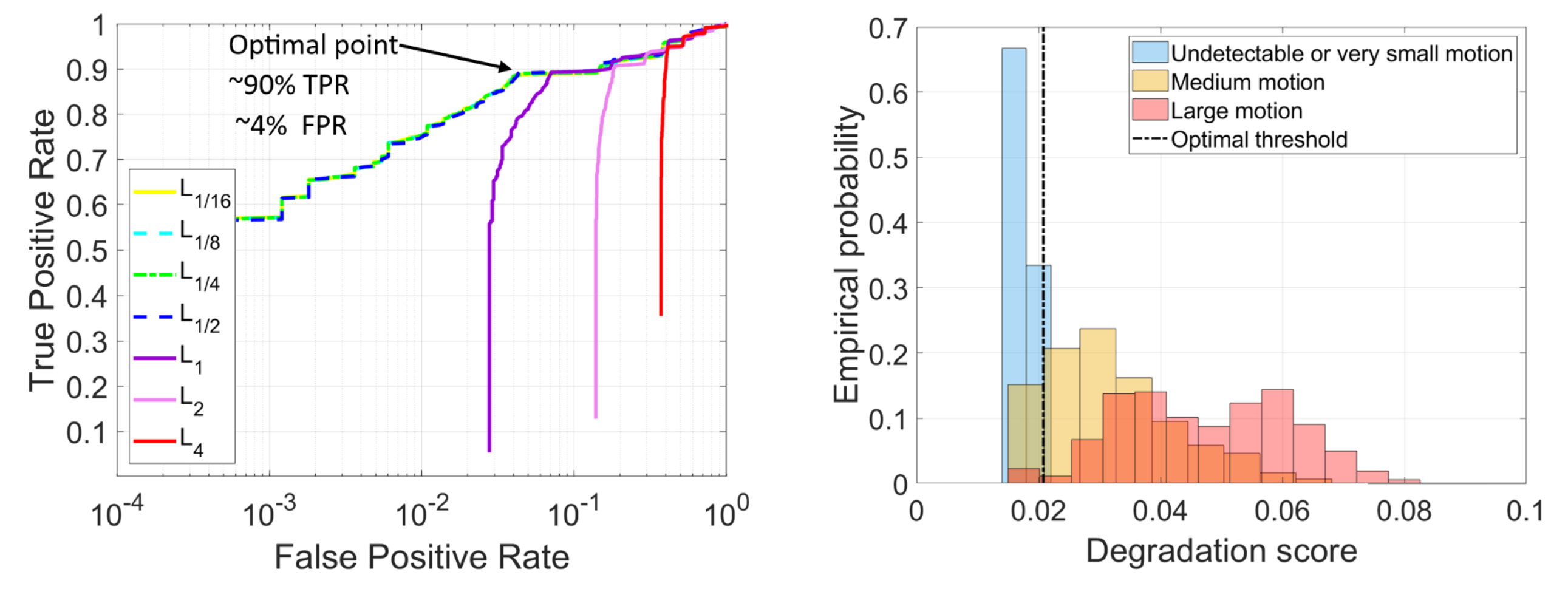
More than 1 million simulations based on more than 1000 slices of 43 motion-free 2D multi-slice T1-w spin-echo acquisitions were generated to train the deep learning models. Simulations entail rotational motion events with Normally distributed ($$$\mu = 0^{\circ}$$$, $$$\sigma = 1.5^{\circ}$$$) angles and arbitrary rotation centres occurring at a given phase encoding (PE) line. Two different motion durations were chosen $$$(s_1 < 1TR;s_2 < 3TR)$$$. To evaluate simulation quality and similarity compared to real examples, we developed a k-space quality metric that leverages k-space signal drops in the vicinity of motion events. The method computes a degradation score based on $$$L^{p}, p<1$$$ quasinorms: $${||\boldsymbol{x}||}_p := -(\sum_{i=1}^n |(\textrm{log}|x_i|)|^p)^{\frac{1}{p}}$$ of the logarithm of the magnitude of phase encoding lines, followed by thresholding based on discrete derivatives. For motion estimation, we trained several instances of our deep learning model on restricted k-space regions of width $$$w$$$. The reduced input size allows for a larger training dataset, reduced memory footprint and improved statistical efficiency. The deep learning model receives an input of $$$w$$$ PE lines $$$\times 2$$$ (real and imaginary) and outputs three estimated motion parameters: rotation angle $$$\theta$$$ and two translations $$$t_x, t_y$$$. In vivo performance was assessed using choreography controlled (ChoCo) motion corrupted brain testsets3. Motion correction was performed with the non-uniform fast Fourier transform (NUFFT)4 for rotational motion cancellation and conjugate phase ramps for translational artifacts removal. Motion artifact reduction was measured using the Shannon entropy metric.Results
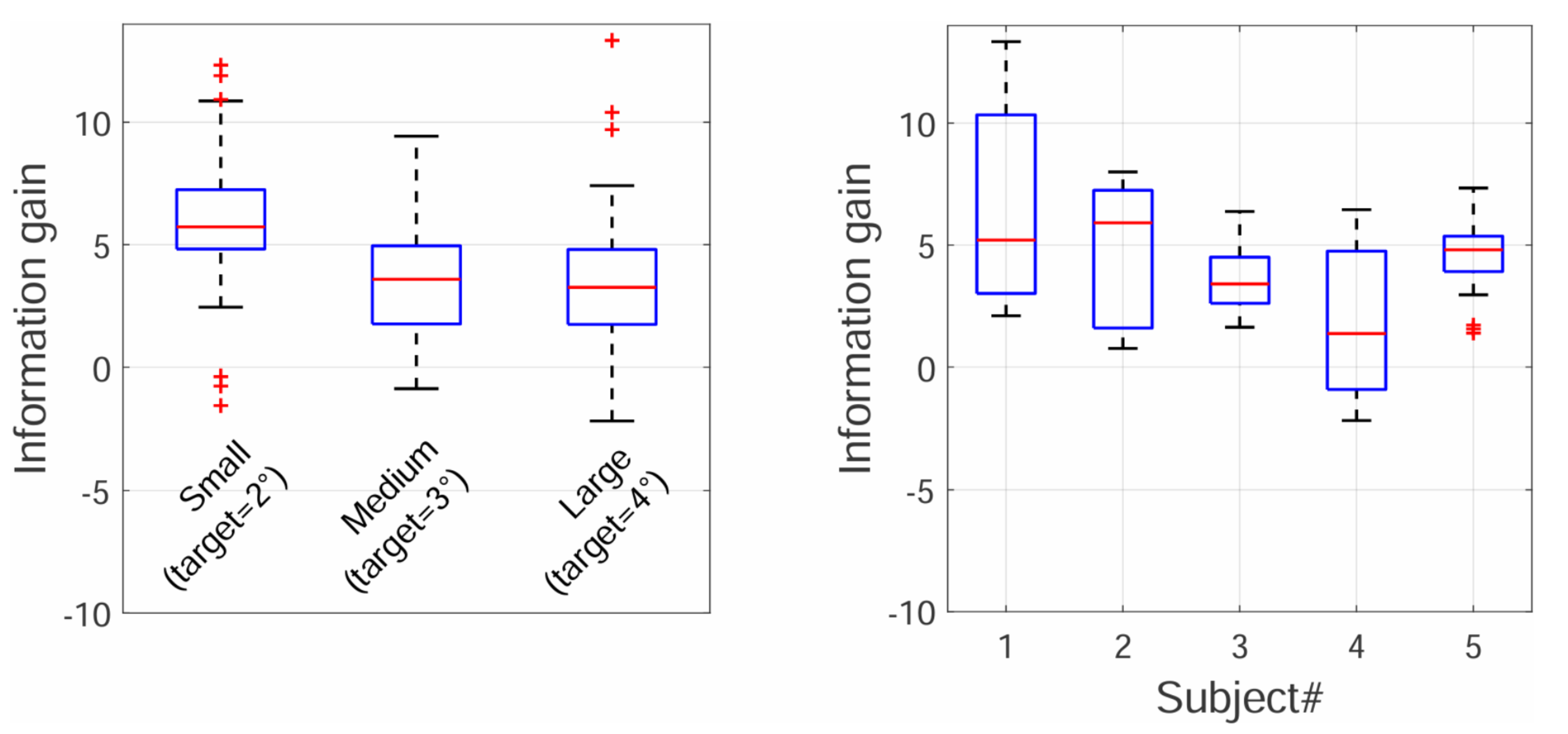
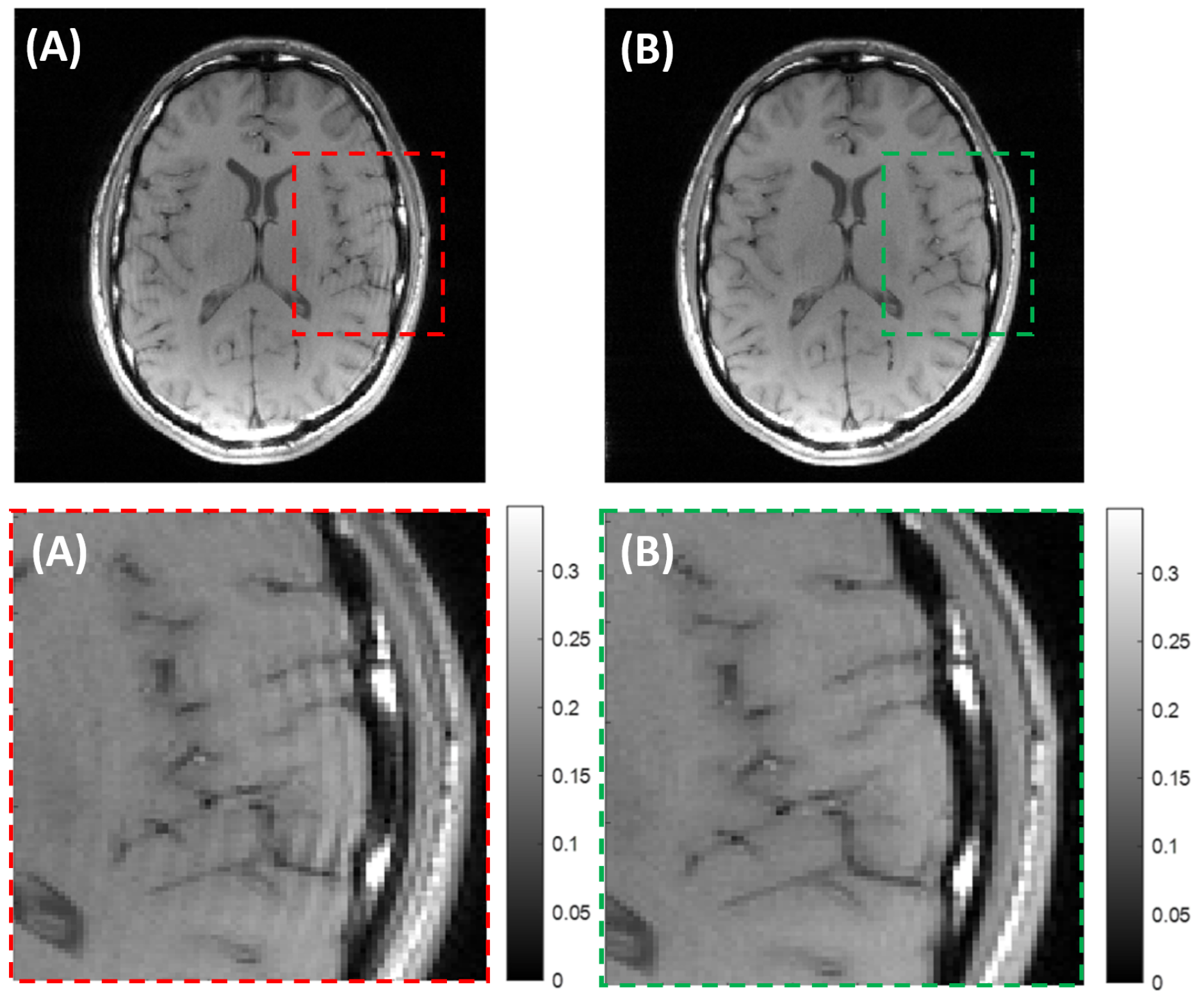
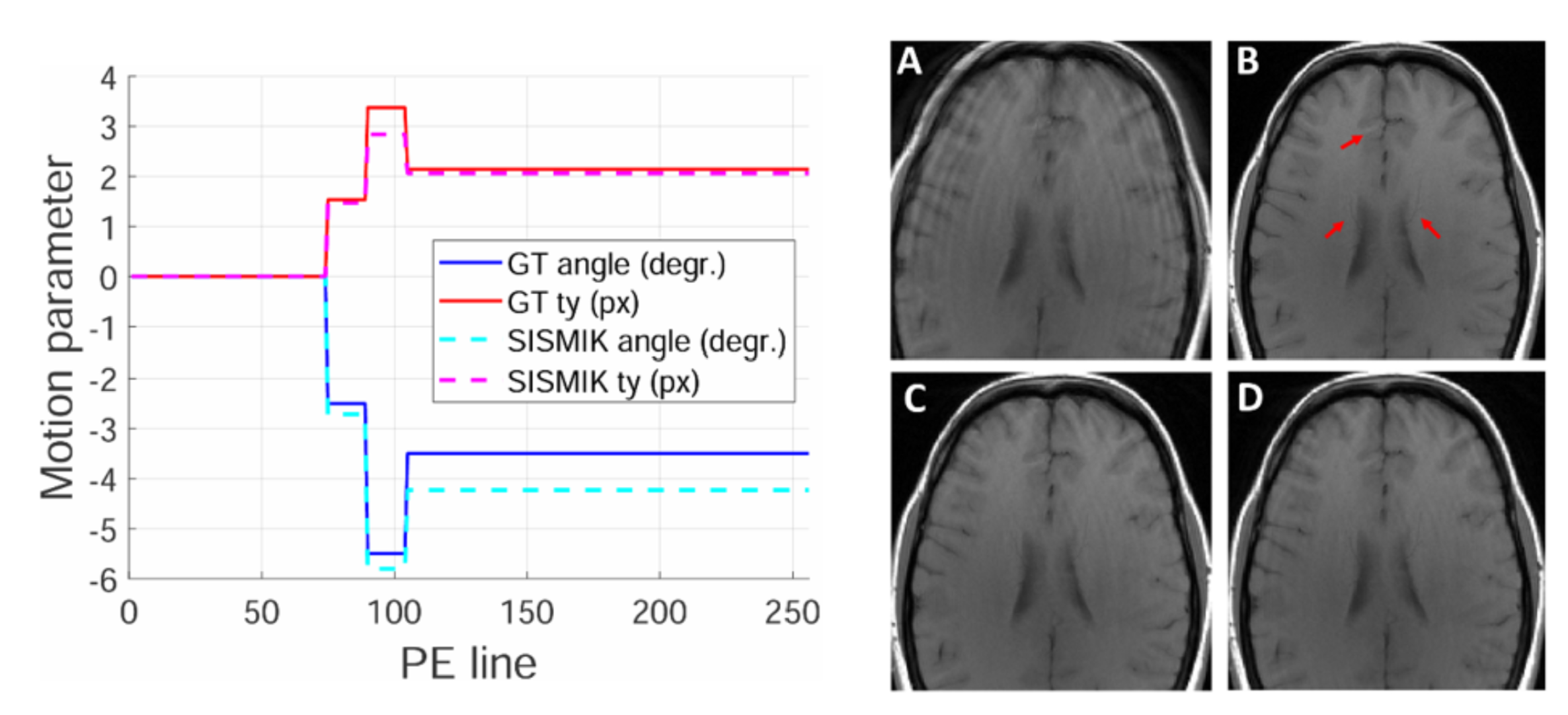
To demonstrate the capabilities of SISMIK (Figure 1), experiments were performed on the following PE lines: 30,50,75,90 and 105 (decreasing spatial frequency, with DC at line 129, acquisitions of size $$$256 \times 256$$$). For an intermediate spatial frequency (PE=75) SISMIK exhibits an RMSE of $$$0.55^{\circ}$$$ for rotational motion estimation and 0.35 pixels for translations. Quantitative in vivo results for 5 volunteers are shown in Figure 2 and exhibit 100% positive information gain (entropy difference between motion corrupted and motion corrected images) in all acquisitions of all subjects except for some slices of subject#4, and substantial qualitative reduction of motion artifacts (Figure 3). Results extending the approach to multiple simulated motion events are presented in Figure 4. Performance of the k-space quality metric was assessed from ROC curves computed with 1000 thresholds from simulated data with 1 motion event occurring anywhere in k-space (Figure 5). An optimal $$$L^p, p=0.5$$$ quasinorm was found exhibiting an AUC of 0.95 (true positive rate of 90 % and false positive rate of 4 %).Discussion
Our novel k-space quality metric effectively distinguishes various motion classes, demonstrating strong detection performance with an AUC of 0.95. This suggests its reliability as a tool for scoring and detecting motion corruption. This appeared useful to generate realistic simulations used to train the model. SISMIK motion parameter estimation allows substantial motion artifact removal through a model-based reconstruction approach avoiding hallucinations5. Motion estimation performance increases with decreasing spatial frequency, likely due to improved SNR. Results obtained in Figure 4 demonstrate that SISMIK models trained on single rotational events only, can be generalized to more realistic scenarios involving a succession of motion events. Indeed, SISMIK’s estimations are performed relatively to preceding PE lines, owing to the temporal correlation among them. For example, it will output $$$\theta = -1^{\circ}$$$ for a motion event from $$$\theta = 3^{\circ}$$$ to $$$\theta = 2^{\circ}$$$ , which is reasonable, since the notion of zero degrees is arbitrary and not known by the model.Conclusion
We have demonstrated that the estimation of rigid head motion in the k-space of MRI brain scans can be effectively achieved, in a referenceless manner, with SISMIK, a deep convolutional neural network, and that a dedicated reconstruction of the corrected k-space can significantly mitigate the induced artifacts.Acknowledgements
No acknowledgement found.References
- Maxim Zaitsev, Julian Maclaren, and Michael Herbst. Motion artifacts in mri: A complex problem with many partial solutions. Journal of Magnetic Resonance Imaging, 42(4):887–901, 2015.
- Julian Hossbach, Daniel Nicolas Splitthoff, Stephen Cauley, Bryan Clifford, Daniel Polak, Wei-Ching Lo, Heiko Meyer, and Andreas Maier. Deep learning-based motion quantification from k-space for fast model-based magnetic resonance imaging motion correction. Medical physics, 50(4):2148– 2161, 2023.
- Oscar Dabrowski, Sebastien Courvoisier, Jean-Luc Falcone, Antoine Klauser, Julien Songeon, Michel Kocher, Bastien Chopard, and Francois Lazeyras. Choreography controlled (choco) brain mri artifact generation for labeled motion-corrupted datasets. Physica Medica, 102:79–87, 2022.
- J Fessler. Michigan image reconstruction toolbox. 2018. URL: https://web.eecs.umich.edu/~fessler/code, 2018.
- Sayantan Bhadra, Varun A Kelkar, Frank J Brooks, and Mark A Anastasio. On hallucinations in tomographic image reconstruction. IEEE transactions on medical imaging, 40(11):3249–3260, 2021.
Figures