2377
Fast Magnetization-Prepared Gradient Echo Sequences for 3D-T1rho Mapping of the Knee Joint Using Optimized Variable Flip-Angles1Radiology, NYU Grossman School of Medicine, New York, NY, United States, 2Siemens Medical Solutions, Malvern, PA, United States
Synopsis
Keywords: Pulse Sequence Design, Quantitative Imaging
We proposed an efficient magnetization-prepared gradient echo (MP-GRE) sequence that uses optimized variable flip-angles (OVFA) to reduce acquisition time by 4x while increasing SNR when compared to magnetization-prepared angle-modulated partitioned k-space spoiled GRE snapshots (MAPSS), typically used for T1rho mapping. The proposed OVFA based sequence can improve the spatial resolution of T1rho mapping by 4x, with nearly same SNR and scan time as MAPSS.Introduction:
T1rho mapping can be accelerated by using undersampling or fast pulse sequences. In this work, we demonstrate the potential of magnetization-prepared gradient echo (MP-GRE) sequences (1–3) with optimized variable flip-angles (OVFA) for accelerated T1rho mapping. We compare the proposed modified sequence against one of the most used sequences for T1rho mapping, the magnetization-prepared angle-modulated partitioned k-space spoiled GRE snapshots (MAPSS) (1,4). The proposed new sequence based on OVFA can provide 4X more data per unit of time, and also achieve better SNR than MAPSS, allowing to acquire T1rho data faster and with higher spatial resolutions.Methods:
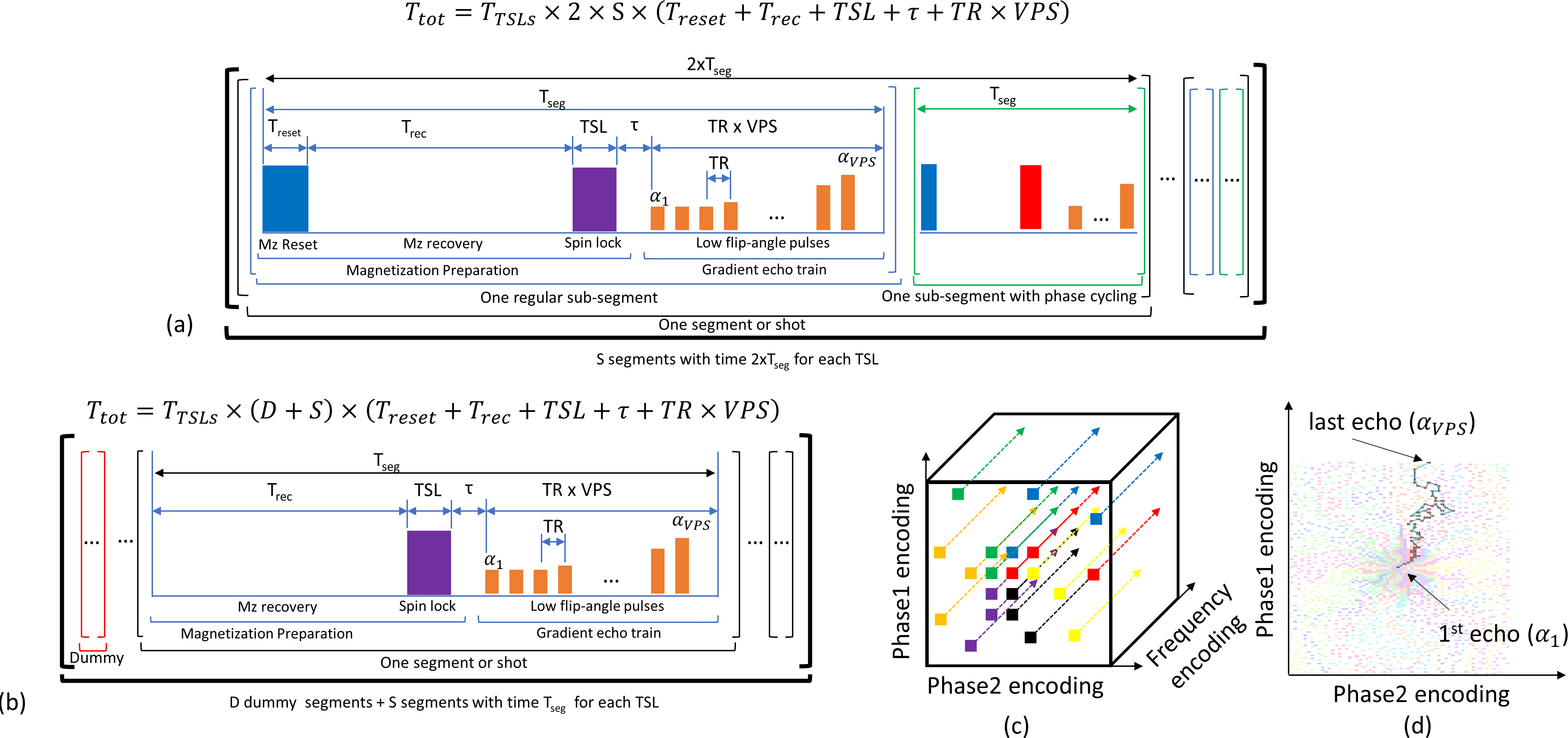
MAPSS (4) and MP-GRE (5) sequences for T1rho mapping are shown in Figure 1(a) and 1(b) respectively, with their total time ($$$T_{tot}$$$). MAPSS used a Mz reset pulse at each shot, followed by Mz recovery time (Trec), T1rho preparation, and an imaging echo train that acquires several k-space lines. The number of lines collected, or views-per-segment (VPS), and its center-out ordering (6) are shown in Figure 1(c) and (d). Fully sampled or undersampled patterns may be used (6). MP-GRE does not use the Mz reset pulse, which allows for much smaller Trec. Because of it, MP-GRE requires some dummy segments (where no data is acquired) to reach a steady-state. MAPSS uses optimized flip-angles (FA) to reduce filtering effects (4). MP-GRE typically uses constant FA (CFA) (5). Here, we propose an optimization framework, that generalizes the optimization of MAPSS, considering not only reducing the filtering effects (7) but also improving SNR and T1rho accuracy.The signal evolution (SE) model for MP-GRE sequences is given by (see (1) for SE of MAPSS):
$$M_{xy}(s,n)=A(n)M_{prep}(s)+B(n),$$
where $$$n$$$ represents the echo index and $$$s$$$ represents the shot position, and
$$A(n)=e_{\tau}\left[\prod_{i=1}^{n-1}e_1cos(\alpha_i)\right]e_2sin(\alpha_n)$$
and
$$B(n)=M_0\left\{(1-e_{\tau})\left[\prod_{i=1}^{n-1}e_1cos(\alpha_i)\right]+(1-e_{1})\left[1+\sum_{p=2}^{n-1}\left(\prod_{i=p}^{n-1}e_1cos(\alpha_i)\right)\right]\right\}e_2sin(\alpha_n)$$
where $$$e_{\tau}=e^{-\frac{\tau}{T_{1}}}$$$, $$$e_{1}=e^{-\frac{TR}{T_{1}}}$$$, $$$e_{2}=e^{-\frac{TE}{T2}}$$$, and
$$M_{prep}(s)=\left[M_z(s-1,VPS)e^{-\frac{T_{rec}}{T_{1}}}+M_0(1-e^{-\frac{T_{rec}}{T_{1}}})\right]e^{-\frac{TSL}{T_{1\rho}}}$$
where $$$1\leq n\leq VPS$$$, and:
$$M_{z}(s,n)=C(n)M_{prep}(s)+D(n),$$
With
$$C(n)=e_{\tau}\left[\prod_{i=1}^{n}e_1cos(\alpha_i)\right],$$ $$D(n)=M_0\left\{(1-e_{\tau})\left[\prod_{i=1}^{n}e_1cos(\alpha_i)\right]+(1-e_{1})\left[1+\sum_{p=2}^{n}\left(\prod_{i=p}^{n}e_1cos(\alpha_i)\right)\right]\right\}$$
being $$$M_{prep}(1)=M_0e^{-\frac{TSL}{T_{1\rho}}}$$$.
We optimize the FA using:
$${\bf \hat{\alpha}}=\arg\min_{\alpha}\left[\sum_{k=1}^K\omega_k\left(\lambda_A||{\bf Am}_k(\alpha)||_2^2+\lambda_F||{\bf Fm}_k(\alpha)||_2^2+\lambda_S||{\bf S}({\bf m}_k(\alpha)-{\bf m}_{ref}||_2^2 \right)\right]$$
where $$${\bf m}_k(\alpha)$$$ in the normalized SE, $$${\bf m}_k(\alpha)=[M_{xy}(k,t_1,1,1)/e^{-\frac{t_1}{T_{1\rho}(k)}}...M_{xy}(k,t_T,S+D,VPS)/e^{-\frac{t_T}{T_{1\rho}(k)}}]$$$, being $$$M_{xy}(k,t,s,n)$$$ the SE with relaxation set $$$1\leq k\leq K$$$, where $$$K$$$ is the number of relaxation sets, considering $$$T_{1}(k),T_{2}(k),T_{1\rho}(k)$$$, for $$$1\leq t\leq T$$$, where $$$T$$$ is the number of TSLs, on the segment $$$1\leq s\leq S+D$$$, after the flip-angle pulse $$$1\leq n\leq VPS$$$.
We used $$$\omega_k=|T_{1\rho}(k)|^2/\sum_{i=1}^{K}|T_{1\rho}(i)|^2$$$. The first term targets accuracy, with the matrix $$$\bf A$$$ computes the finite difference between all pairs of $$$M_{xy}(k,t_p,s,1)/e^{-\frac{t_T}{T_{1\rho}(k)}}$$$ and $$$M_{xy}(k,t_q,s,1)/e^{-\frac{t_T}{T_{1\rho}(k)}}$$$, being $$$t_p$$$ and $$$t_q$$$ two different TSLs. The second term reduces the filtering effects, where the matrix $$$\bf F$$$ computes the finite difference on the SE inside the segment, and it is repeated for all TSLs. The third term targets a better SNR, where $$${\bf m}_{ref}$$$ is the reference signal, and the matrix $$${\bf S}$$$ has ones in the positions we want to be close to $$${\bf m}_{ref}$$$, and zeros on the others. The non-linear least squared problem is minimized with the TRCG method (8).
The optimization is weighted primarily to improve $$$T_{1\rho}$$$ accuracy first, secondarily to improve SNR, and thirdly to reduce filtering effects in MP-GRE sequences in configurations that make it faster than MAPSS. Note we also apply this framework to MAPSS itself (denoted by MAPSS-OVFA), to improve SNR.
Results and Discussion:
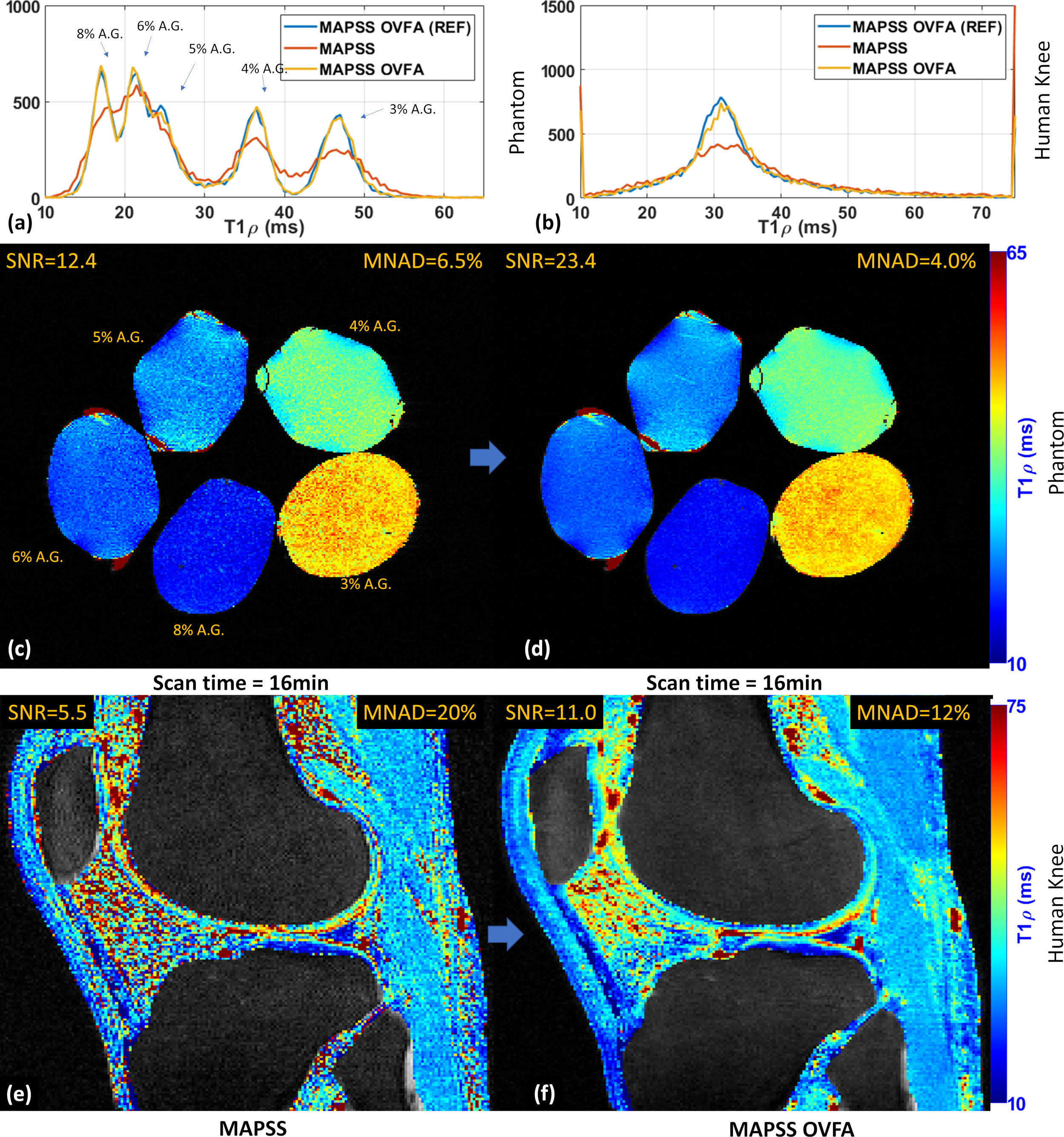
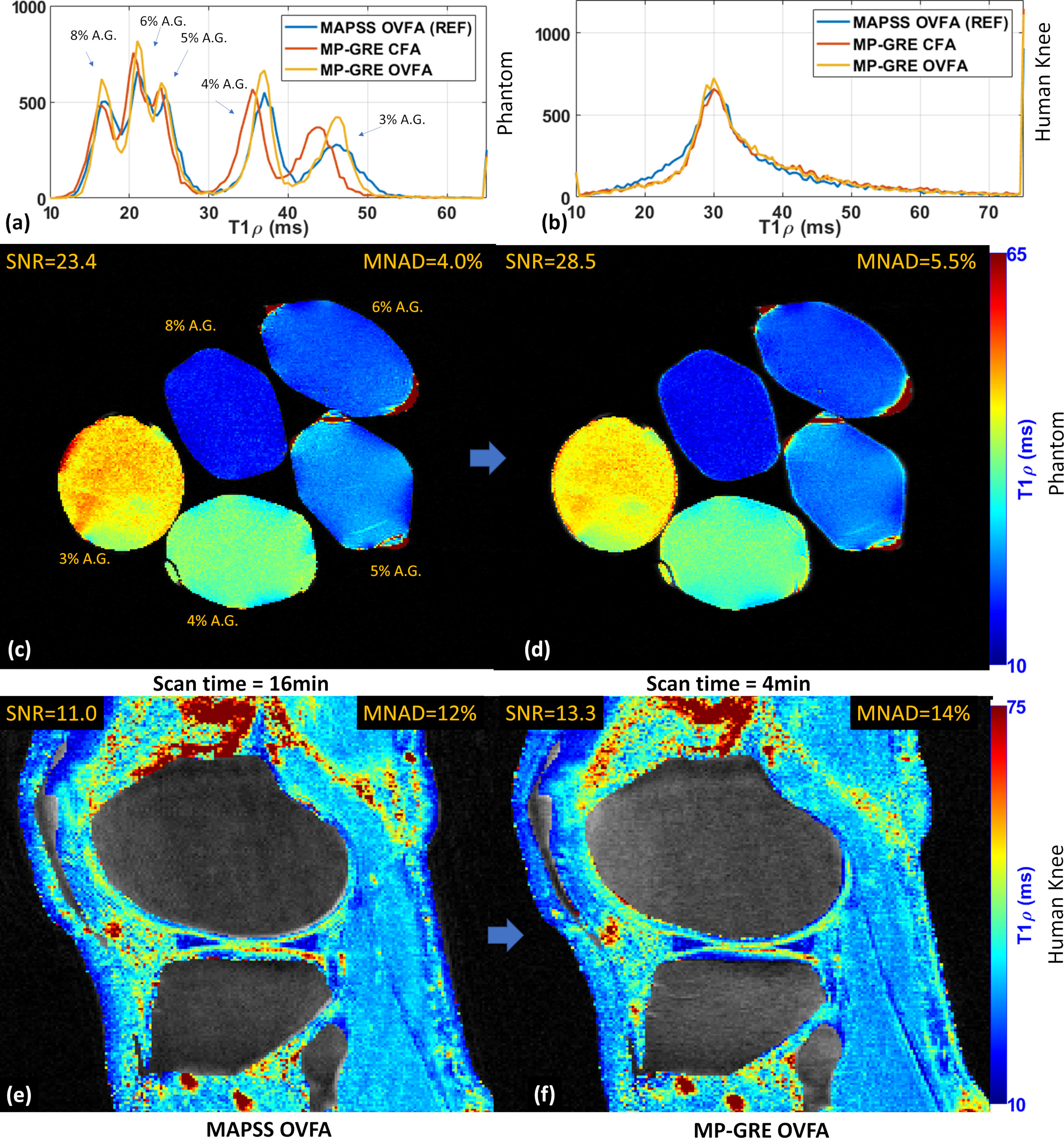
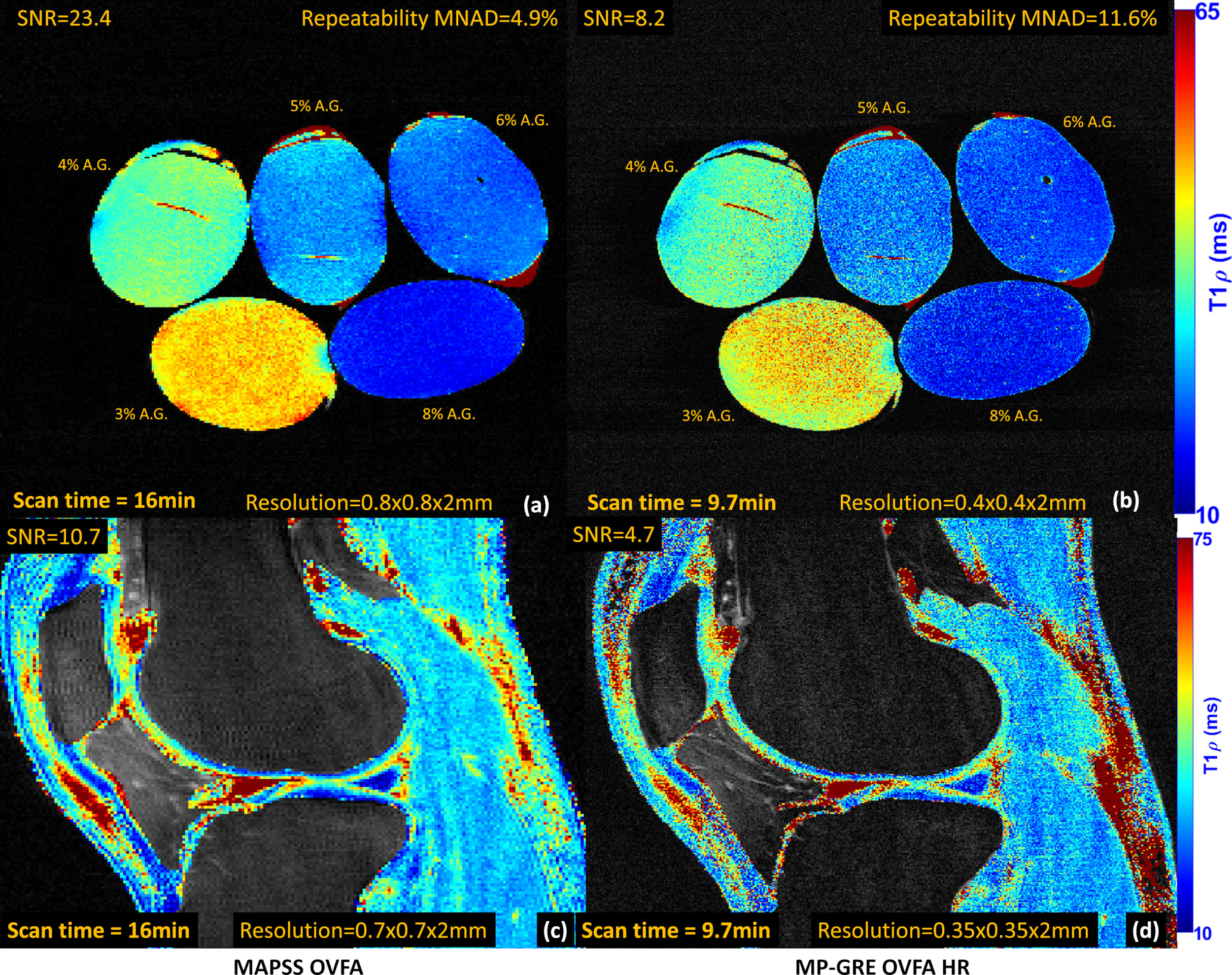
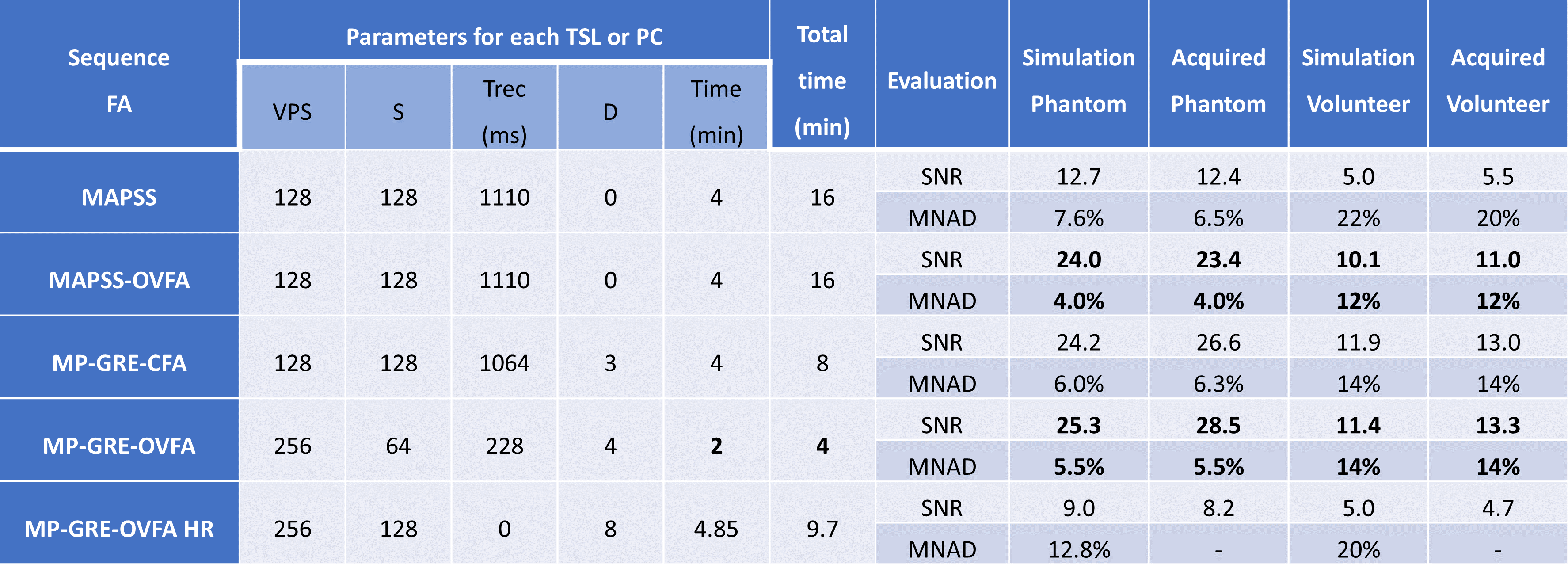
We compare the results visually and with SNR and the mean of the normalized absolute deviation (MNAD) (see (9) for details on how to compute them). In Figure 2, we show the results with MAPSS and MAPSS-OVFA, to illustrate the improvement that OVFA can obtain in MAPSS. Because MAPSS-OVFA obtained the best quality it was chosen as the reference. In Figure 3, we compared the MAPSS-OVFA to our proposed sequence, named MP-GRE-OVFA, which is 4X faster than MAPSS. In Figure 4, we illustrate a comparison of MAPSS-OVFA with MP-GRE-OVFA with spatial resolution improved by 4X. In Table 1 we see the numerical results of the approaches compared to MAPSS-OVFA, including an evaluation with synthetic data, where ground truth is known.Conclusion:
The proposed optimization framework was able to produce a modified MP-GRE sequence that can be 4X faster and achieve more SNR than MAPSS for T1rho mapping. With this sequence, we can improve the spatial resolution by 4X with a similar scan time and SNR as compared to MAPSS.Acknowledgements
This study was supported by NIH grants, R21-AR075259-01A1, R01-AR068966, R01-AR076328-01A1, R01-AR076985-01A1, and R01-AR078308-01A1 and was performed under the rubric of the Center of Advanced Imaging Innovation and Research (CAI2R), an NIBIB Biomedical Technology Resource Center (NIH P41-EB017183).References
1. Peng Q, Wu C, Kim J, Li X. Efficient phase-cycling strategy for high-resolution 3D gradient-echo quantitative parameter mapping. NMR Biomed. 2022:1–19 doi: 10.1002/nbm.4700.
2. He L, Wang J, Lu Z-L, Kline-Fath BM, Parikh NA. Optimization of magnetization-prepared rapid gradient echo (MP-RAGE) sequence for neonatal brain MRI. Pediatr. Radiol. 2018;48:1139–1151 doi: 10.1007/s00247-018-4140-x.
3. Hargreaves B. Rapid gradient‐echo imaging. In: Journal of Magnetic Resonance Imaging. Vol. 36. ; 2012. pp. 1300–1313. doi: 10.1002/jmri.23742.
4. Li X, Han ET, Busse RF, Majumdar S. In vivo T1ρ mapping in cartilage using 3D magnetization-prepared angle-modulated partitioned k-space spoiled gradient echo snapshots (3D MAPSS). Magn. Reson. Med. 2008;59:298–307 doi: 10.1002/mrm.21414.
5. Sharafi A, Xia D, Chang G, Regatte RR. Biexponential T 1ρ relaxation mapping of human knee cartilage in vivo at 3 T. NMR Biomed. 2017;30:e3760 doi: 10.1002/nbm.3760.
6. Zibetti MVW, Sharafi A, Keerthivasan MB, Regatte RR. Prospective Accelerated Cartesian 3D-T1rho Mapping of Knee Joint using Data-Driven Optimized Sampling Patterns and Compressed Sensing. In: Proceedings of the Annual Meeting of ISMRM 2021. ; 2021.
7. Zhu D, Qin Q. A revisit of the k-space filtering effects of magnetization-prepared 3D FLASH and balanced SSFP acquisitions: Analytical characterization of the point spread functions. Magn. Reson. Imaging 2022;88:76–88 doi: 10.1016/j.mri.2022.01.015.
8. Steihaug T. The conjugate gradient method and trust regions in large scale optimization. SIAM J. Numer. Anal. 1983;20:626–637 doi: 10.1137/0720042.
9. Zibetti MVW, Sharafi A, Regatte RR. Optimization of spin‐lock times in T1ρ mapping of knee cartilage: Cramér‐Rao bounds versus matched sampling‐fitting. Magn. Reson. Med. 2022;87:1418–1434 doi: 10.1002/mrm.29063.
Figures