2027
Dual-echo 3D Spiral Navigators for the Detection of Temporal Motions and B0 Shifts in Gradient-echo Imaging at 3.0 T
Yuguang Meng1, James J. Lah2, Jason W. Allen1,2, and Deqiang Qiu1
1Department of Radiology and Imaging Sciences, Emory University, Atlanta, GA, United States, 2Department of Neurology, Emory University, Atlanta, GA, United States
1Department of Radiology and Imaging Sciences, Emory University, Atlanta, GA, United States, 2Department of Neurology, Emory University, Atlanta, GA, United States
Synopsis
Keywords: Data Acquisition, Artifacts
In gradient-echo imaging, the motion effects on the reconstructed images could be exacerbated by the temporal B0 field changes due to respiration and the subjects’ unintentional position/posture changes during scanning. An efficient 3D spiral navigator independent of the multi-echo gradient-echo (mGRE) acquisition train was designed and implemented in a 3D mGRE sequence. The results showed that although there were unintentional movements during acquisitions, the temporal B0 changes could be significant at 3.0 T. The design provides flexible TE options for mGRE in obtaining simultaneous T1-weighted and T2*-weighted contrasts, quantitative T2* and/or quantitative susceptibility mapping.Introduction
Motion artifacts are common in MRI scans due to unintentional or noncooperative movements during MRI data acquisitions 1,2. In gradient-echo imaging, the motion effects on the reconstructed images could be exacerbated by the temporal B0 field changes due to unavoidable respiration and the subjects’ unintentional position and/or posture changes during scanning 1. In this work, an efficient 3D spiral navigator to detect temporal motions and B0 shifts was designed and implemented in a 3D multi-echo gradient-echo (mGRE) sequence.Methods
In vivo 3D human brain scans were performed with written consent under the approval from the University Institutional Review Board. The 3D mGRE sequence with navigators for motion and B0 shift tracking was implemented on a Siemens 3T MRI scanner (Prisma model, Siemens Healthcare) with 32 head receive coils and IDEA software version VE11C. As seen in Fig. 1, at the beginning of the sequence, an under-sampled 3D spiral navigator was inserted with the parameters: one interleaf, matrix size = 48×48×32, isotropic resolution = 4.5 mm, acceleration factor R = 2 in the slice direction, dual echoes with TEs = 1.6 and 20 ms. In subsequent excitations, each under-sampled spiral navigator was interleaved with 26 repetitions of (i.e., 26 TRs) Cartesian GRE acquisitions with 5 echoes, first TE = 4 ms and echo-spacing = 7 ms, matrix size = 320×320×104, acceleration factor R = 4 in the in-plane phase-encoding direction, resolution = 0.7 mm × 0.7 mm × 1.4 mm. The same RF flip angle of 15o and TR of 37 ms were used for both the navigators and the mGRE excitations to maintain a steady state of the signal. The scanning time was 12 minutes. Following 2D gridding in the in-plane directions, the 3D spiral navigators were reconstructed using GRAPPA in the slice direction. Dual-echo data for each receive coil was used to remove the phase offsets in the navigator to obtain the B0 off-resonance field 3. The rigid-body translations and rotations relative to the initial position/ posture were measured with the “flirt” script in FSL toolbox (FMRIB, Oxford), and the B0 shifts were measured from the phase images of the navigators.Results
As shown in Fig. 2a-b, gradient-echo image with long TE produced more significant artifacts than with short TE as indicated by white arrows. The translations and rotations were measured along with the temporal B0 shifts on a subject (Fig. 2c-d). While there were unintentional movements during acquisitions for the subject as shown in the measured minor translations (<0.2 mm) and rotations (<0.2o), the temporal B0 changes were more significant with a standard deviation around 50 Hz. Ongoing work is being performed to incorporate these motion and B0 estimates in the reconstruction of mGRE images to minimize artifacts.Discussion
This work developed a dual-echo 3D navigators for simultaneous motion and B0 tracking in mGRE sequence. Since the temporal B0 change is inevitable due to respirations 2, incorporating dynamic B0 corrections along with motion corrections during imaging reconstructions is important for MRI scans at 3.0T. It is worth noting that the applied navigators are independent of the mGRE acquisition train, thus providing flexible TE options for mGRE in obtaining simultaneous T1-weighted and T2*-weighted contrasts, quantitative T2* and/or quantitative susceptibility mapping (QSM). Given the efficient motion tracking and B0 measurements, such MR contrasts or quantitative measurements can benefit from various motion/ B0 correction methods to minimize artefacts.Acknowledgements
National Institutes of Health Grants: P30AG066511, R01AG072603 and R21AG064405.References
1. Liu Jiaen, Gelderen Peter van, Zwart Jacco A de, et al. Reducing motion sensitivity in 3D high-resolution T2*-weighted MRI by navigator-based motion and nonlinear magnetic field correction. Neuroimage. 2020;206:116332.
2. Gretsch Frédéric, Marques José P, Gallichan Daniel. Investigating the accuracy of FatNav-derived estimates of temporal B0 changes and their application to retrospective correction of high-resolution 3D GRE of the human brain at 7T. Magn Reson Med. 2018;80(2):585-597.
3. Robinson Simon, Jovicich Jorge. B0 mapping with multi-channel RF coils at high field. Magn Reson Med. 2011;66(4):976-988.
Figures
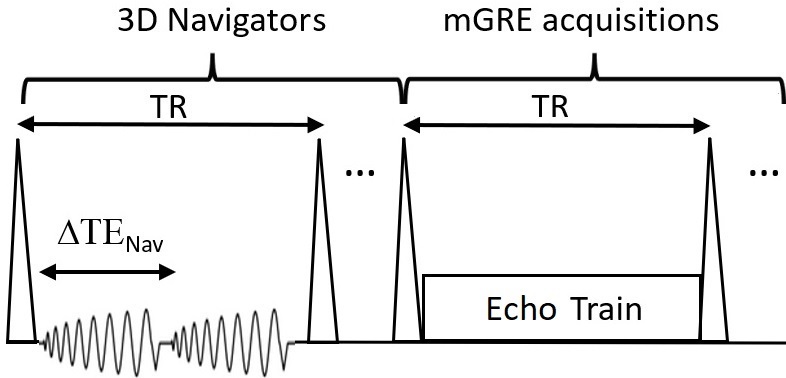
Figure 1. The
mGRE sequence with 3D spiral navigator with dual TEs.
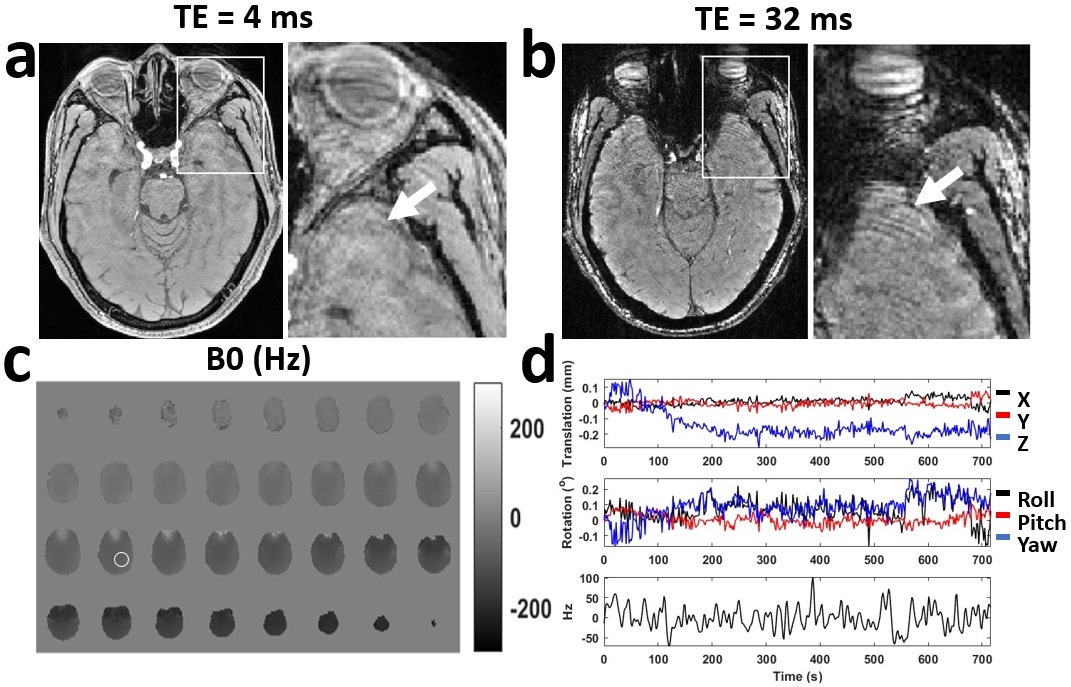
Figure 2. (a) and (b): the
GRE images with different echo time, with the zoomed-in images in the white boxes. (c): B0 map of the first
navigator. (d): the measured translation and rotation along with the B0
changes, averaged from an area of the B0 map (white circle).
DOI: https://doi.org/10.58530/2023/2027