1822
Combined motion and B0 correction of susceptibility weighted imaging with jointly acquired FID and spherical navigators1Medical Biophysics, Western University, London, ON, Canada, 2Robarts Research Institute, London, ON, Canada
Synopsis
Keywords: Motion Correction, Motion Correction
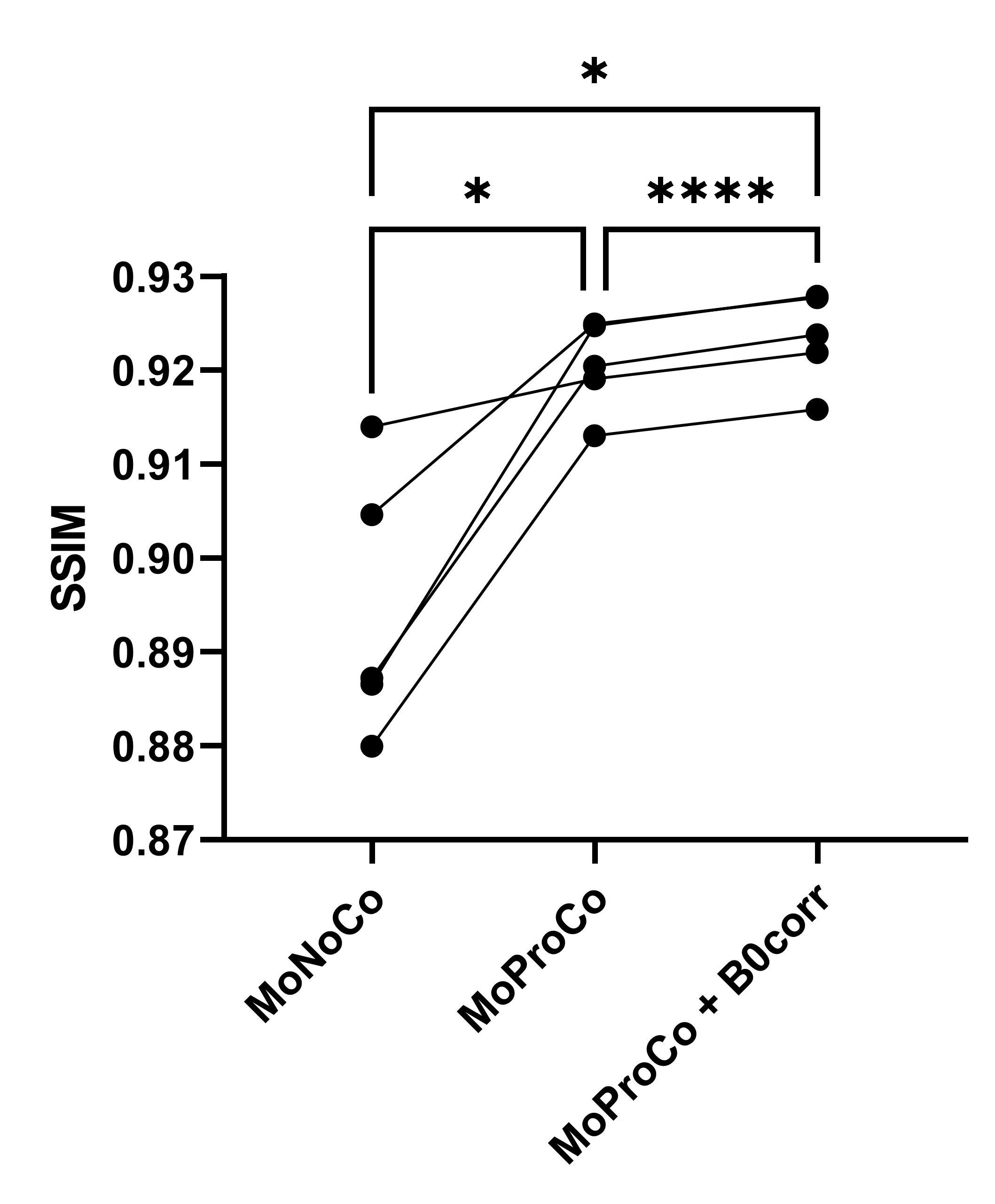
Jointly acquired FID and spherical navigators were applied for prospective correction of motion and retrospective correction of zeroth order field offsets in a susceptibility weighted imaging protocol. Initial results showed a significant reduction in motion artifacts with prospective motion correction, quantified using structural similarity index. Retrospective B0 correction provided an additional improvement in image quality (also statistically significant). Future work will investigate methods to reduce residual artifacts, as well as incorporating the navigator within deadtime in the sequence to reduce scan time.Introduction
Motion artifacts in MRI are influenced not only by bulk movement of the imaged object but also secondary effects, such as B0 inhomogeneity, which are exacerbated by motion. Changes in B0 throughout image acquisition cause phase artifacts which become especially prominent at long TEs, such as those used for susceptibility weighted imaging (SWI). In such cases, motion correction alone may be insufficient to remove artifacts.1 However, such phase errors can be corrected using field estimates obtained with a variety of methods,2,3 including navigators.4Some applications investigating simultaneous motion and B0 correction have used a combination of navigators and external tracking systems;5,6 however, a purely navigator-based approach without additional hardware may lead to more widespread application. Volumetric navigators alone have been applied for simultaneous motion and B0 correction in a variety of applications,7-10 but are more suited to long TR applications due to long acquisition/processing times. While not as widely investigated, initial results using cloverleaf navigators for simultaneous shim and motion correction also show promise.11
Recent work has described prospective motion correction using a similar, spherical navigator (SNAV) approach, which provides 6-dof motion information in a relatively short acquisition time (10s of ms).12 While this work effectively corrected for the direct effects of motion, the addition of a free induction decay (FID) readout would enable zeroth order field monitoring and retrospective correction of phase discrepancies.13 In the current work, we apply such FID-SNAVs for combined prospective motion correction and retrospective field correction and demonstrate artifact reduction in a SWI protocol.
Methods
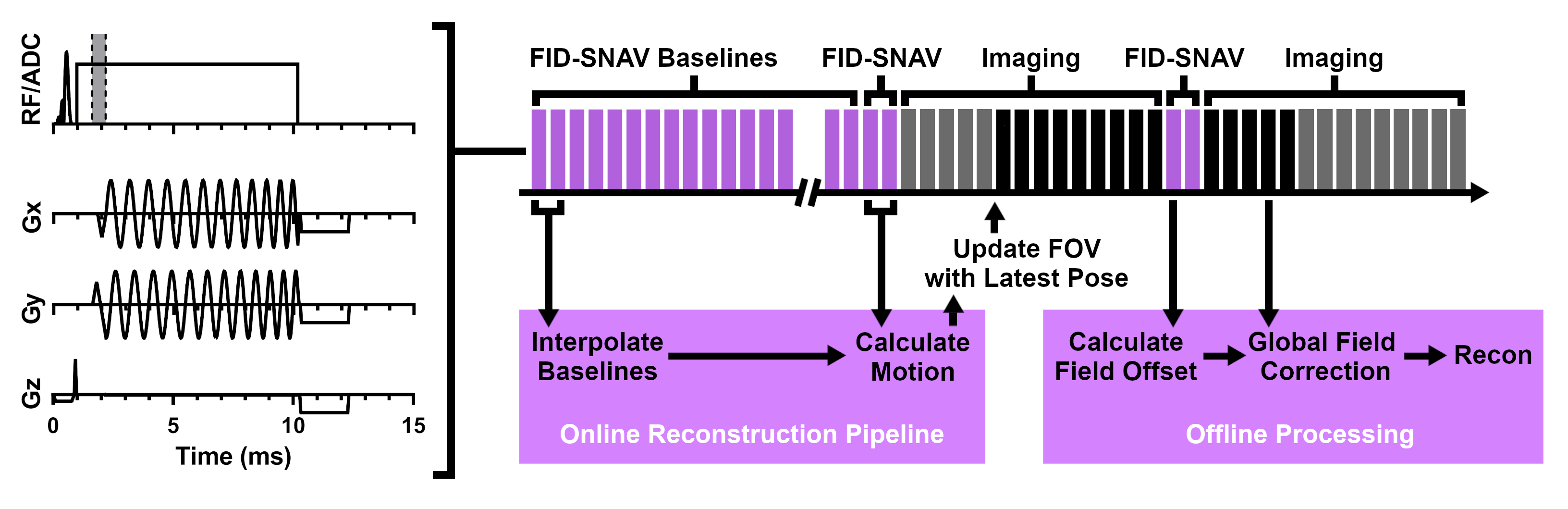
FID-SNAVs (acquired as two hemispheres) were interleaved in a flow-compensated 3D GRE sequence as shown in Figure 1. An additional set of pre-rotated baseline scans was acquired for fast rotation estimation.14 The SNAV portion of the navigator was processed on the scanner to provide motion estimates for prospective motion correction (latency < 60 ms).12 The phase evolution of the FID portion of the navigator was extracted offline on a channel-by-channel basis and used for zeroth order field correction of imaging data15 prior to reconstruction. SWI images were generated using a negative phase mask with four multiplications.16All data were acquired on a 3T Siemens Prisma using a 32-channel head coil with imaging parameters based on a SWI protocol at our institution (FOV = 22x22x15.6 cm, resolution 0.86x0.86x1.5 mm, TE/TR = 20/27 ms, flip angle = 15°, receiver bandwidth 130 Hz/Pixel, GRAPPA R = 2). The frequency of SNAV acquisition was set to 2.5 Hz based on knowledge of typical movement speed17 and the expected error in motion estimates (< 0.5 mm, < 1° for baseline with 1° increments). The original image acquisition time was 6:33, the FID-SNAV baseline required an additional 9 s of scan time, and the interleaved navigators required an additional minute of scan time (navigated image acquisition time 7:43).
With approval from the local Research Ethics Board, three participants were scanned for initial assessment of the technique. At least three scans were performed in each case (random ordering): one with no motion, one with motion but no correction, and one with motion and prospective motion correction. To produce repeatable motion, participants were guided using a visual indicator (crosshair moving in a random, stepwise pattern). Two participants received additional scans with a new motion prompt (overall, five motion trajectories tested). FID-SNAVs were acquired in all cases for comparison; however, only the prospective correction cases underwent additional B0 correction. In addition to visual inspection, image quality of the magnitude images was assessed quantitatively using structural similarity index (SSIM) following skull stripping18 and compared using a repeated measures one-way ANOVA with post hoc multiple comparison analysis (Tukey test).
Results
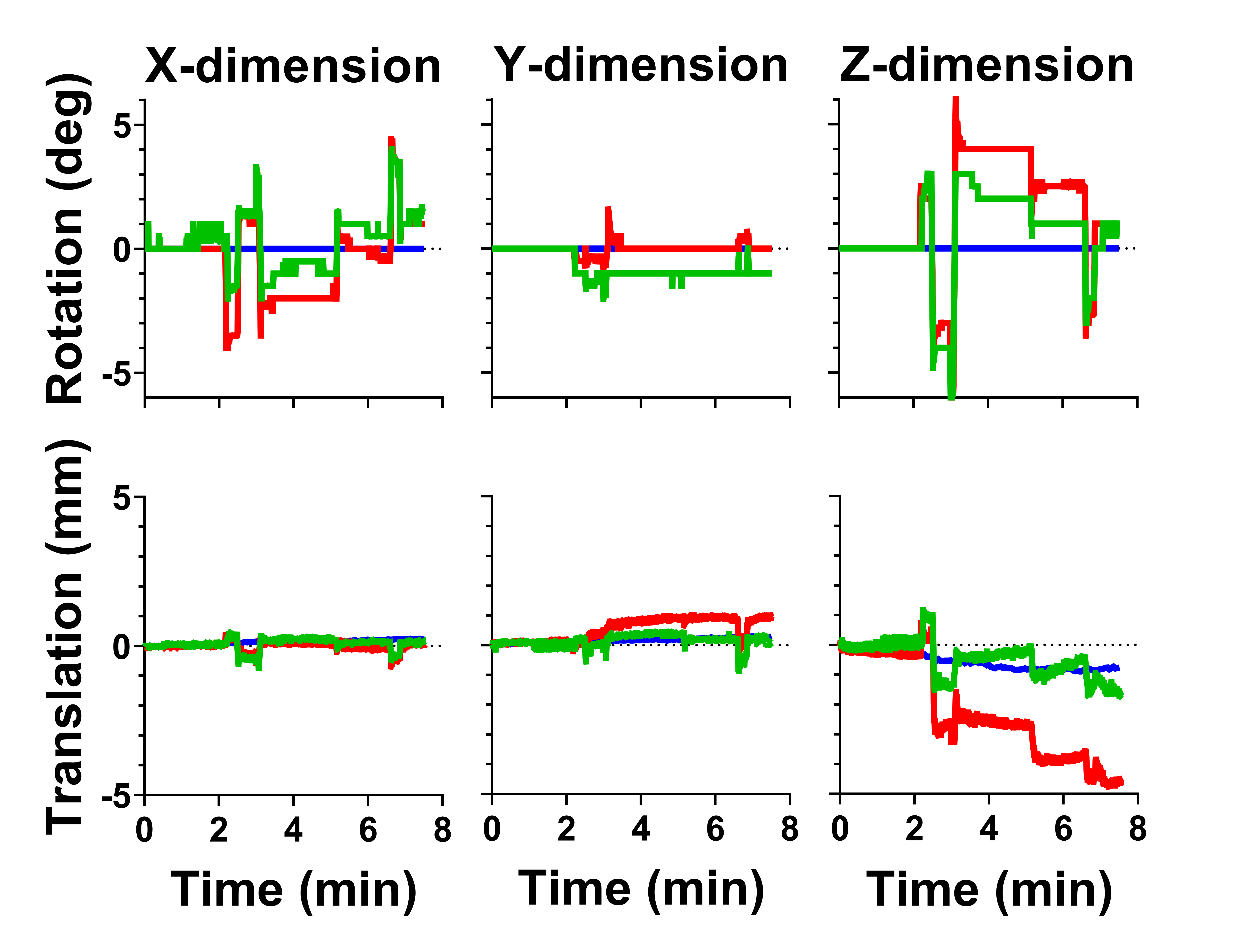
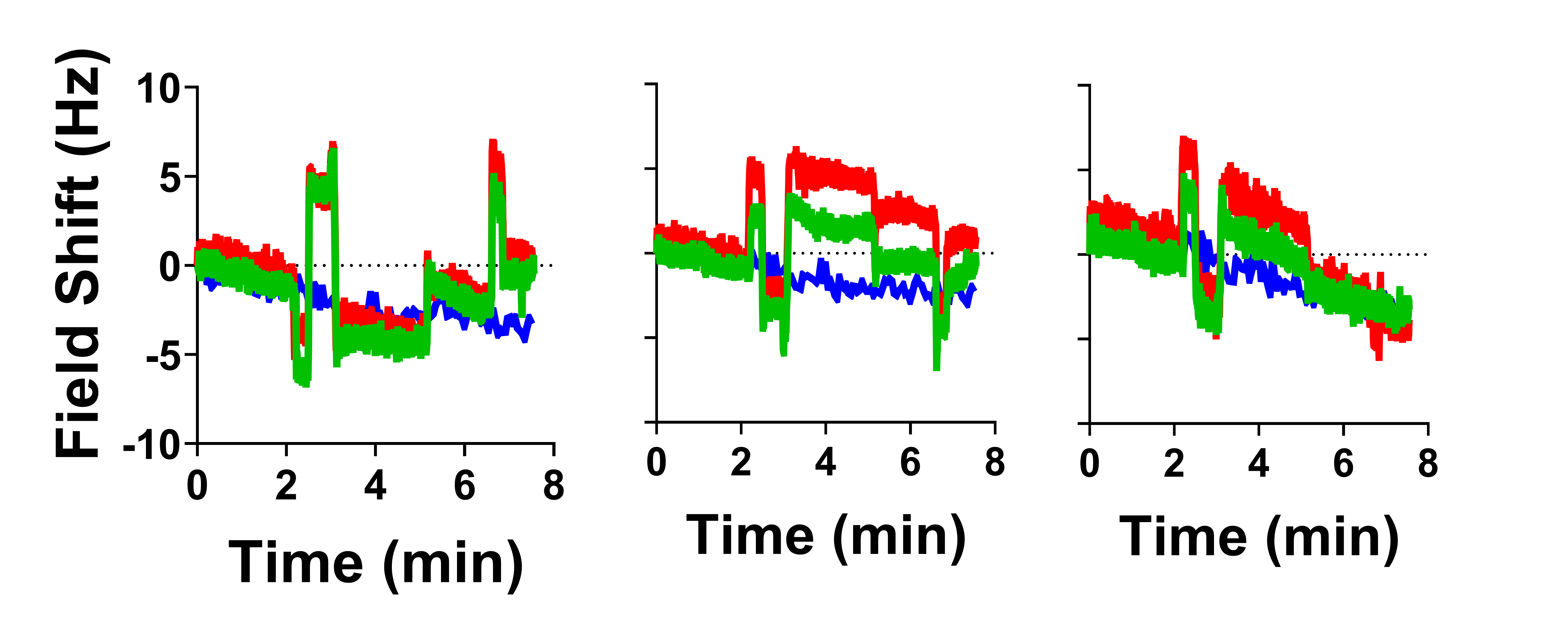
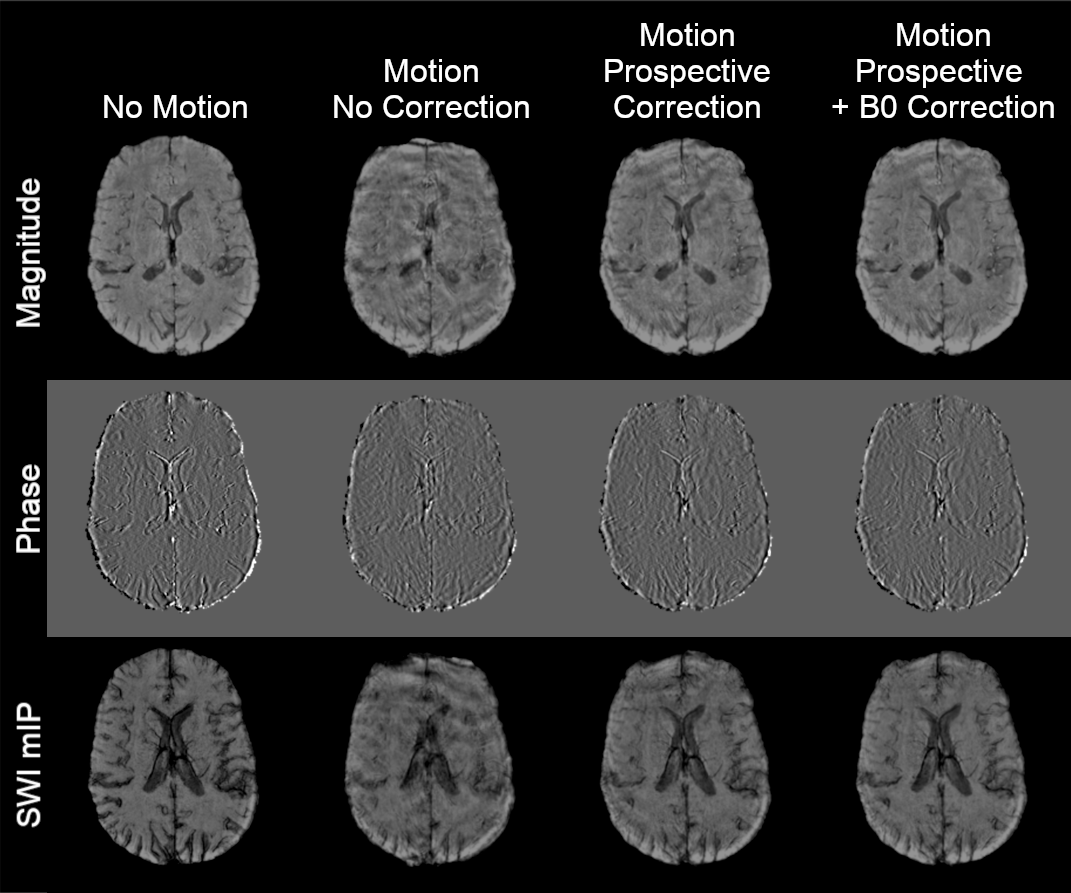
Sample motion traces and field measurements (shown for three sample channels) are given in Figures 2 and 3, respectively, showing similar trajectories (though offset in some cases).Shown in Figure 4 are the corresponding images highlighting a reduction in motion artifacts with prospective motion correction. Clear improvement in image quality is also observed with additional FID-based field correction of imaging data prior to reconstruction, though residual artifacts limit the conspicuity of small vessels.
A summary of the quantitative results for all cases is given in Figure 5. In most cases improvement in image quality was dominated by motion correction alone, though B0 correction provided additional improvement in all cases.
Discussion
In this work, combined FID-SNAVs were implemented for simultaneous correction of motion and corresponding field offsets with application to SWI. Results showed clear improvement in image quality with prospective motion correction. Additional zeroth order correction of field offsets provided an incremental, though noticeable improvement in image quality. Future work will investigate removing residual artifacts, including improved rotation estimation, extraction of higher order field information,19 and/or prospective field correction.20 Additionally, the technique presented acquired FID-SNAVs as a separate excitation, leading to a non-insignificant increase in scan time. However, many navigator applications perform acquisition within deadtime in the imaging sequence.21 Future work will investigate whether the FID-SNAV blocks can be acquired within this deadtime (> 15 ms for this application) without impacting image or navigator quality.Conclusion
The proposed FID-SNAV approach is a fast, purely navigator-based solution for simultaneous correction of 6-dof motion and resulting field offsets.Acknowledgements
This work and the authors are supported by funding from the Natural Sciences and Engineering Research Council of Canada (NSERC) and the Canadian Institutes of Health Research (CIHR). Additional thanks to Johan Berglund and Stefan Skare for sharing the code used to generate motion guiding videos.References
1. Berglund J, Sprenger T, van Niekerk A, Rydén H, Avventi E, Norbeck O, Skare S. Motion-insensitive susceptibility weighted imaging. Magn Reson Med 2021;86:1970-1982.
2. Wezel J, Boer VO, van der Velden TA, Webb AG, Klomp DWJ, Versluis MJ, van Osch MJ, Garpebring A. A Comparison of Navigators, Snap-Shot Field Monitoring, and Probe-Based Field Model Training for Correcting B0-Induced Artifacts in T*2-weighted Images at 7T. Magn Reson Med 2017;78:1373-1382.
3. Loktyushin A, Ehses P, Schölkopf B, Scheffler K. Autofocusing-Based Phase Correction. Magn Reson Med 2018;80:958-968.
4. Versluis MJ, Sutton BP, Bruin PWd, Börnert P, Webb AG, van Osch MJ. Retrospective Image Correction in the Presence of Nonlinear Temporal Magnetic Field Changes Using Multichannel Navigator Echoes. Magn Reson Med 2012;68:1836-1845.
5. Zaitsev M, Speck O, Hennig J, Buchert M. Single-voxel MRS with prospective motion correction and retrospective frequency correction. NMR Biomed 2010;23:325-332.
6. Jorge J, Gretsch F, Gallichan D, Marques JP. Tracking Discrete Off-Resonance Markers With Three Spokes (trackDOTS) for Compensation of Head Motion and B0 Perturbations: Accuracy and Performance in Anatomical Imaging. Magn Reson Med 2018;79:160-171.
7. Hess AT, Tisdall MD, Andronesi OC, Meintjes EM, van der Kouwe AJW. Real-Time Motion and B0 Corrected Single Voxel Spectroscopy Using Volumetric Navigators. Magn Reson Med 2011;66:314-323.
8. Alhamud A, Taylor PA, van der Kouwe AJW, Meintjes EM. Real-Time Measurement and Correction of Both B0 Changes and Subject Motion in Diffusion Tensor Imaging Using a Double Volumetric Navigated (DvNav) Sequence. NeuroImage 2016;126:60-71.
9. Simegn GL, Van der Kouwe AJW, Robertson FC, Meintjes EM, Alhamud A. Real-time simultaneous shim and motion measurement and correction in glycoCEST MRI using double volumetric navigators (DvNavs). Magn Reson Med 2019;81(4):2600-2613.
10. Liu J, van Gelderen P, Zwart JAd, Duyn JH. Reducing motion sensitivity in 3D high-resolution T2*-weighted MRI by navigator-based motion and nonlinear magnetic field correction. NeuroImage 2020;206:116332.
11. van der Kouwe AJW, Benner T, Dale AM. Real-Time Rigid Body Motion Correction and Shimming Using Cloverleaf Navigators. Magn Reson Med 2006;56:1019-1032.
12. Hewlett M, Oran O, Liu J, Drangova M. First application of spherical navigators for prospective correction of intra-scan motion. International Society for Magnetic Resonance in Medicine (ISMRM) Workshop on Motion Detection & Correction; 2022.
13. Johnson PM, Liu J, Drangova M. Simultaneous motion and B0 correction using FID-SNAVs. Annual Meeting of the International Society for Magnetic Resonance in Medicine (ISMRM); 2017. p 1-3.
14. Johnson PM, Liu J, Wade T, Tavallaei MA, Drangova M. Retrospective 3D motion correction using spherical navigator echoes. Magn Reson Imaging 2016;34(9):1274-1282.
15. Pfeuffer J, Van de Moortele P-F, Ugurbil K, Hu X, Glover GH. Correction of Physiologically Induced Global Off-Resonance Effects in Dynamic Echo-Planar and Spiral Functional Imaging. Magn Reson Med 2002;47:344-353.
16. Haacke EM, Xu Y, Cheng Y-CN, Reichenbach JR. Susceptibility Weighted Imaging (SWI). Magn Reson Med 2004;52:612-618.
17. Hess AT, Alfaro-Almagro F, Andersson JL, Smith SM. Head movement in UK Biobank, analysis of 42,874 fMRI motion logs. International Society for Magnetic Resonance in Medicine (ISMRM) Workshop on Motion Detection & Correction; 2022.
18. Jenkinson M, Beckmann CF, Behrens TEJ, Woolrich MW, Smith SM. FSL. NeuroImage 2012;62:782-790.
19. Wallace TE, Afacan O, Kober T, Warfield SK. Rapid measurement and correction of spatiotemporal B0 field changes using FID navigators and a multi‐channel reference image. Magn Reson Med 2020;82:575-589.
20. Wallace TE, Kober T, Stockmann JP, Polimeni JR, K.Warfield S, Afacan O. Real-time shimming with FID navigators. Magn Reson Med 2022;88:2548-2563.
21. Johnson PM, Taylor R, Whelan T, Thiessen JD, Anazodo U, Drangova M. Rigid-body motion correction in hybrid PET/MRI using spherical navigator echoes. Phys Med Biol 2019;64:1-11.
Figures