0431
MR Motion Fingerprinting1Biomedical Engineering and Imaging Institute and Department of Radiology, Icahn School of Medicine at Mount Sinai, New York, NY, United States
Synopsis
Keywords: Motion Correction, MR-Guided Interventions, real-time imaging
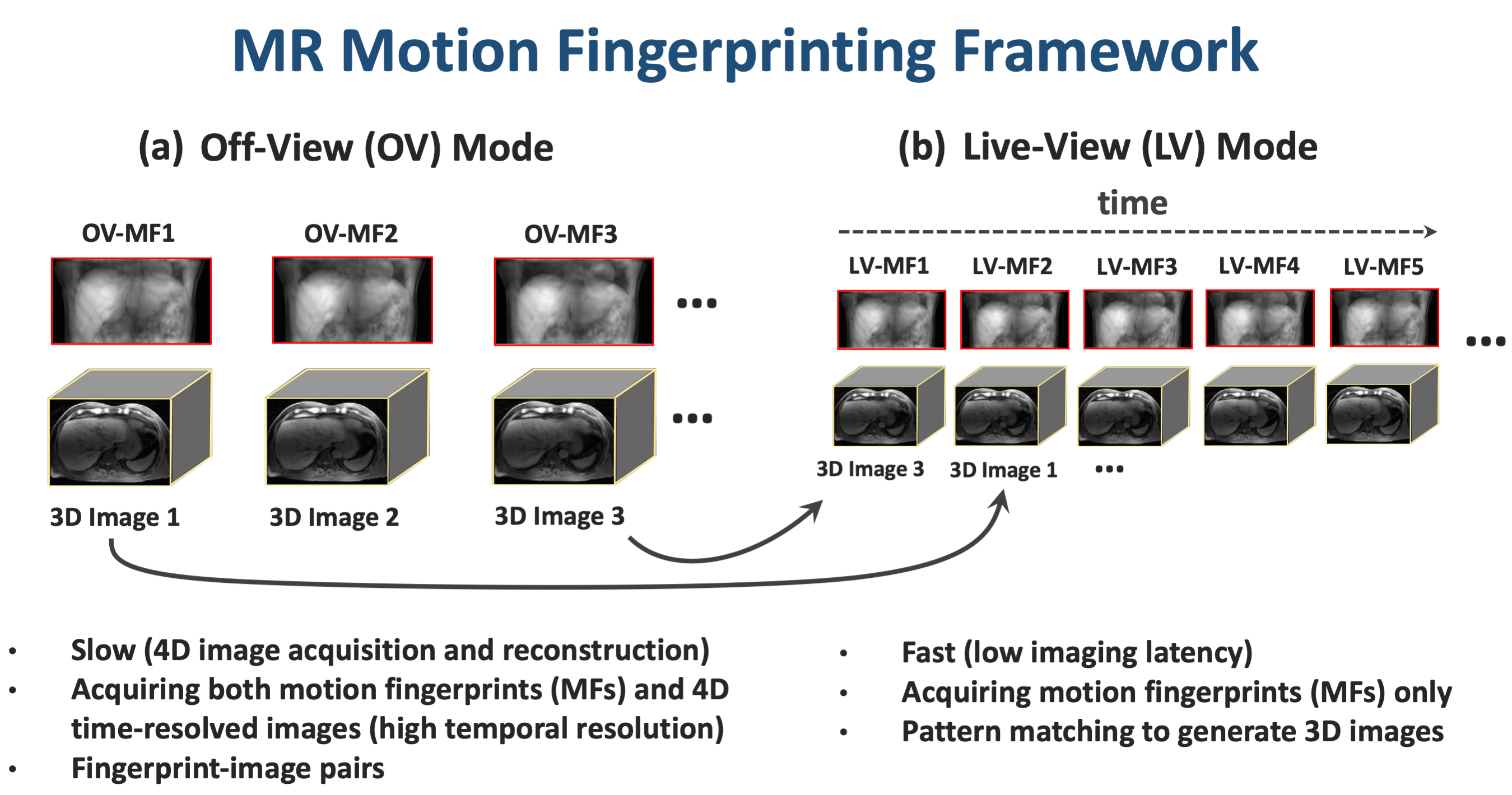
This work proposes a new framework, called MR motion fingerprinting, for fast real-time 3D MRI with an imaging latency<500ms. MR motion fingerprinting has two stages of imaging. The first stage, called the off-view mode, acquires and reconstructs a 4D motion database consisting of hundreds of real-time 3D images and associated 2D motion fingerprints. The second step, called the live-view mode, only acquires 2D motion fingerprints, which are used to search for matched 3D images from the motion database. This new approach enables efficient, accurate and robust real-time imaging with ultralow latency, which could be used for adaptive radiotherapy on MRI-Linac.Introduction
In recent years, there has been a strong trend to use MRI for image-guided treatment beyond traditional diagnostic purpose (1–3). One example that has gained substantial interest now is MRI-guided external beam radiotherapy using a multimodality scanner called MRI-Linac (4–7). Two essential requirements for MRI-guided adaptive radiotherapy include (a) low imaging latency below 500ms, which can be simply approximated as the sum of data acquisition time and image reconstruction time, and (b) high imaging fidelity (e.g., robustness to motion, distortions and other confounding effects) (8). The purpose of this work was to propose a novel framework, called MR motion fingerprinting, which can enable high-fidelity real-time volumetric MRI with an imaging latency below 500ms and can be translated into an MRI-Linac machine for motion adaptive radiotherapy.Methods
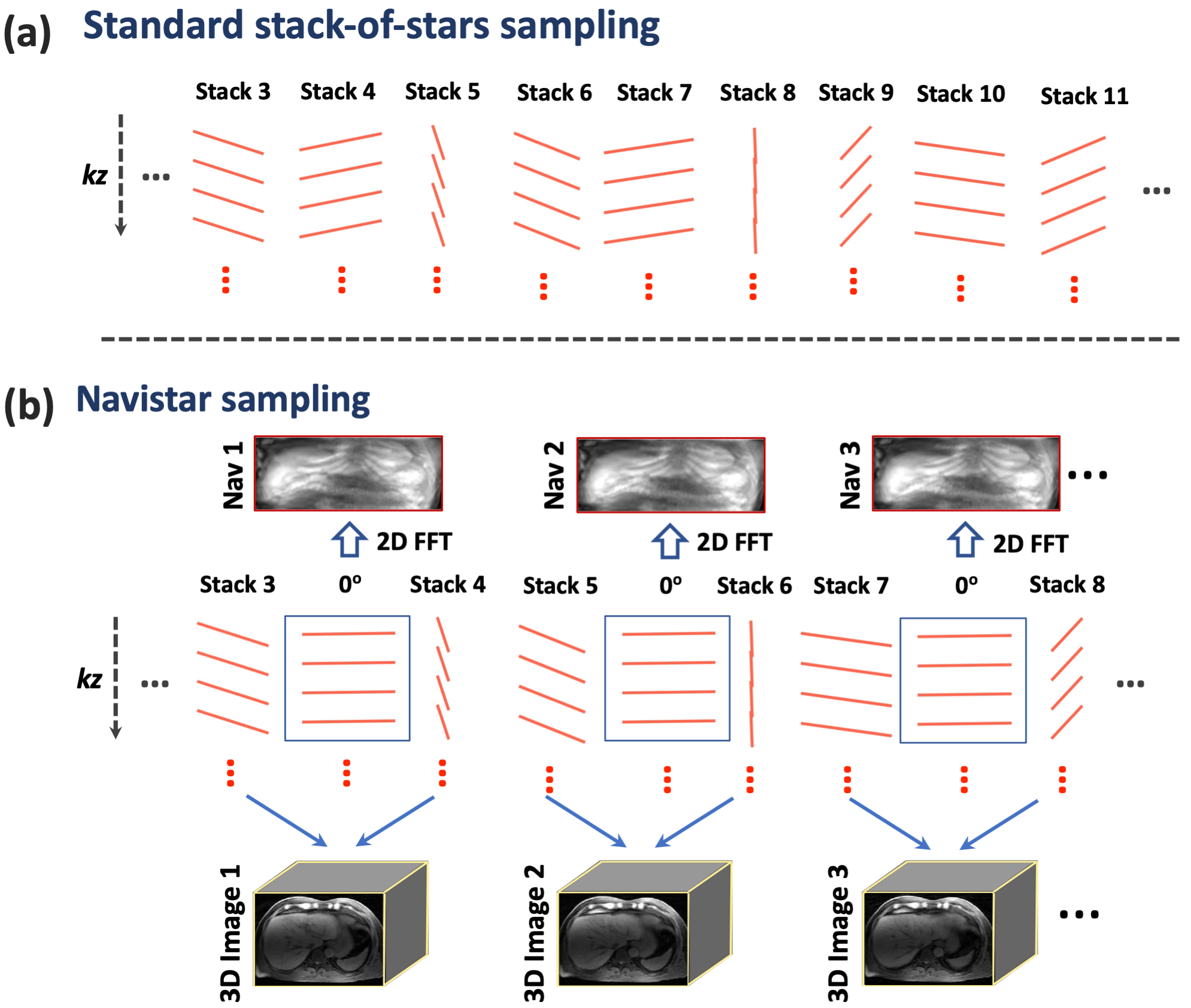
MR motion fingerprinting involves two imaging modes performed in two separate but connected stages, one called off-view mode (the first stage) and the other one called live-view mode (the second stage). The off-view mode employs a new sampling strategy called Navistar for data acquisition (see Figure 1), which embeds 2D motion fingerprints into 3D stack-of-stars golden-angle radial sampling. Combining Navistar sampling with a recently proposed GRASP-Pro (Golden-angle RAdial Sparse Parallel imaging with imProved Performance) reconstruction method (9, 10), the off-view mode acquires and reconstructs hundreds of time-resolved real-time 3D images with sub-second temporal resolution to form a 4D motion database, in which each 3D image is uniquely linked to a 2D motion fingerprint, as shown in Figure 2.The motion fingerprinting (matching) process is performed based on 2D pattern marching between the off-view and live-view motion fingerprints. At a given time point, a 2D live-view motion fingerprint is acquired and is compared to all the 2D off-view motion fingerprints. A 3D image whose off-view motion fingerprint best matches the newly acquired live-view fingerprint is selected as the 3D image for the current time point. The matching is performed based on the structure similarity index (SSIM), and a threshold of 0.9 is set to determine whether the match is acceptable. If the SSIM is below 0.9 (due to, for example, deep breathing or other types of movement), the current live-view fingerprint is rejected and the motion fingerprinting process is moved to the next time point. In this way, 3D images can be generated efficiently in the live-view mode without lengthy acquisition and reconstruction.
The accuracy and robustness of MR motion fingerprinting was demonstrated in 16 subjects. Two specific studies were performed to evaluate the accuracy and robustness of MR motion fingerprinting. For the accuracy study, there was no body movement during the imaging process, while body movement was simulated by shifting the imaging FOV for the robustness study during data acquisition in the off-view mode. MR motion fingerprinting was compared with previous approaches using a similar two-stage imaging scheme but with 1D projection-based motion matching (11, 12) for both accuracy and robustness.
Results
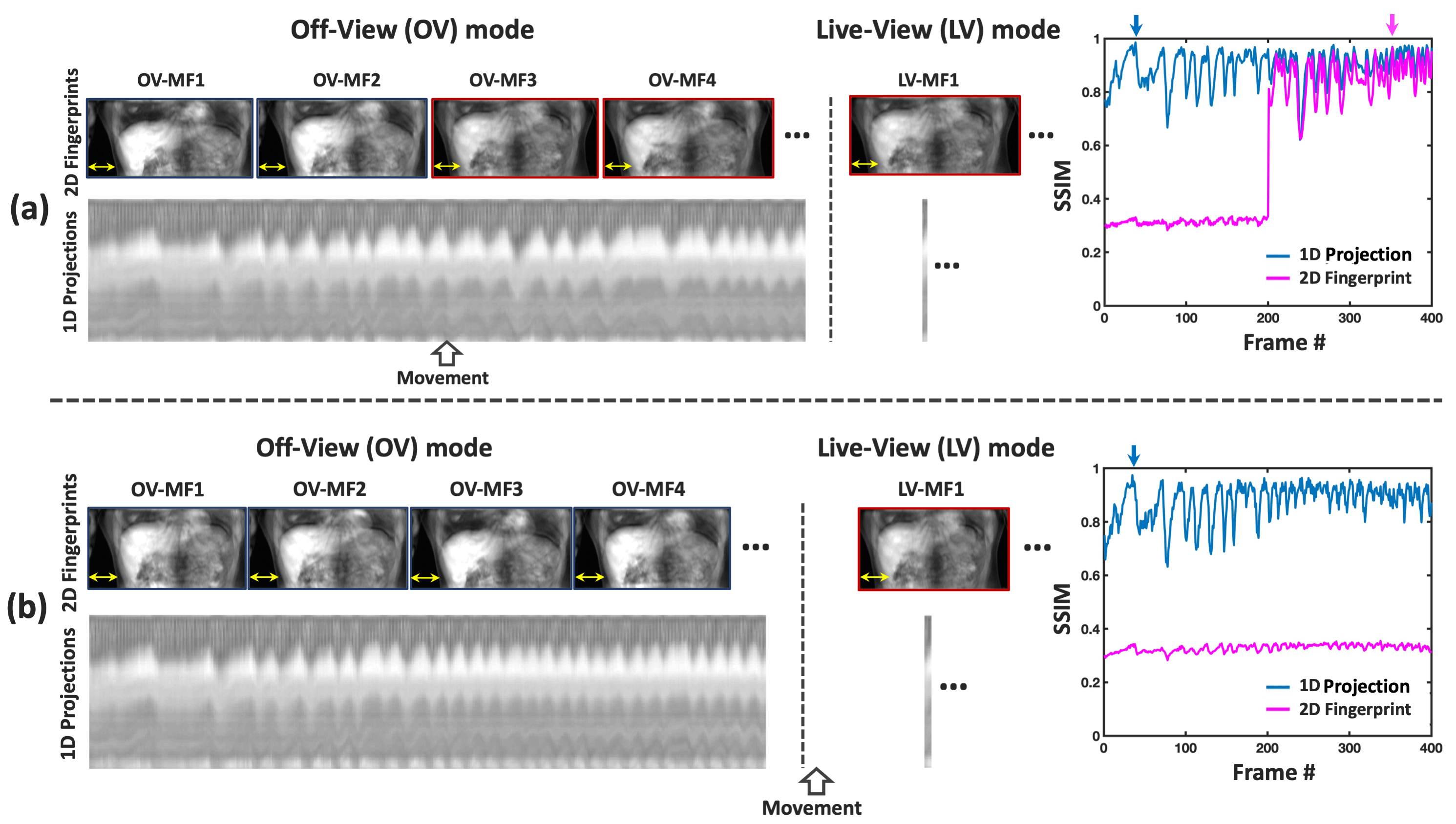
MR motion fingerprinting was able to achieve a total imaging latency of ~0.4s with implementation in MATLAB, including time to acquire a 2D motion fingerprint (~0.11s), time to perform 2D FFT on the 2D motion fingerprint (~0.015s) and time of the motion fingerprinting (matching) process (~0.25-0.3s).Figure 3 shows two scenarios where the use of 2D fingerprints is important, necessary and advantageous over 1D projections for motion matching. In the first scenario (Figure 3a), shift of FOV (to simulate left-right body movement) occurred during the off-view mode. This could be detected using 2D fingerprint matching by comparing each live-view fingerprint to off-view fingerprints, as shown by the pink curve. The movement, however, is hard to be seen and detected with 1D projection matching (blue curve). In the second scenario (Figure 3b), shift of FOV occurred between the off-view mode and the start of the live-view mode. This movement could also be detected using 2D fingerprint matching (the pink curve), while 1D projection matching could not detect the movement (the blue curve). In practice, these two scenarios might both lead to treatment failure, indicating the importance of 2D fingerprint matching.
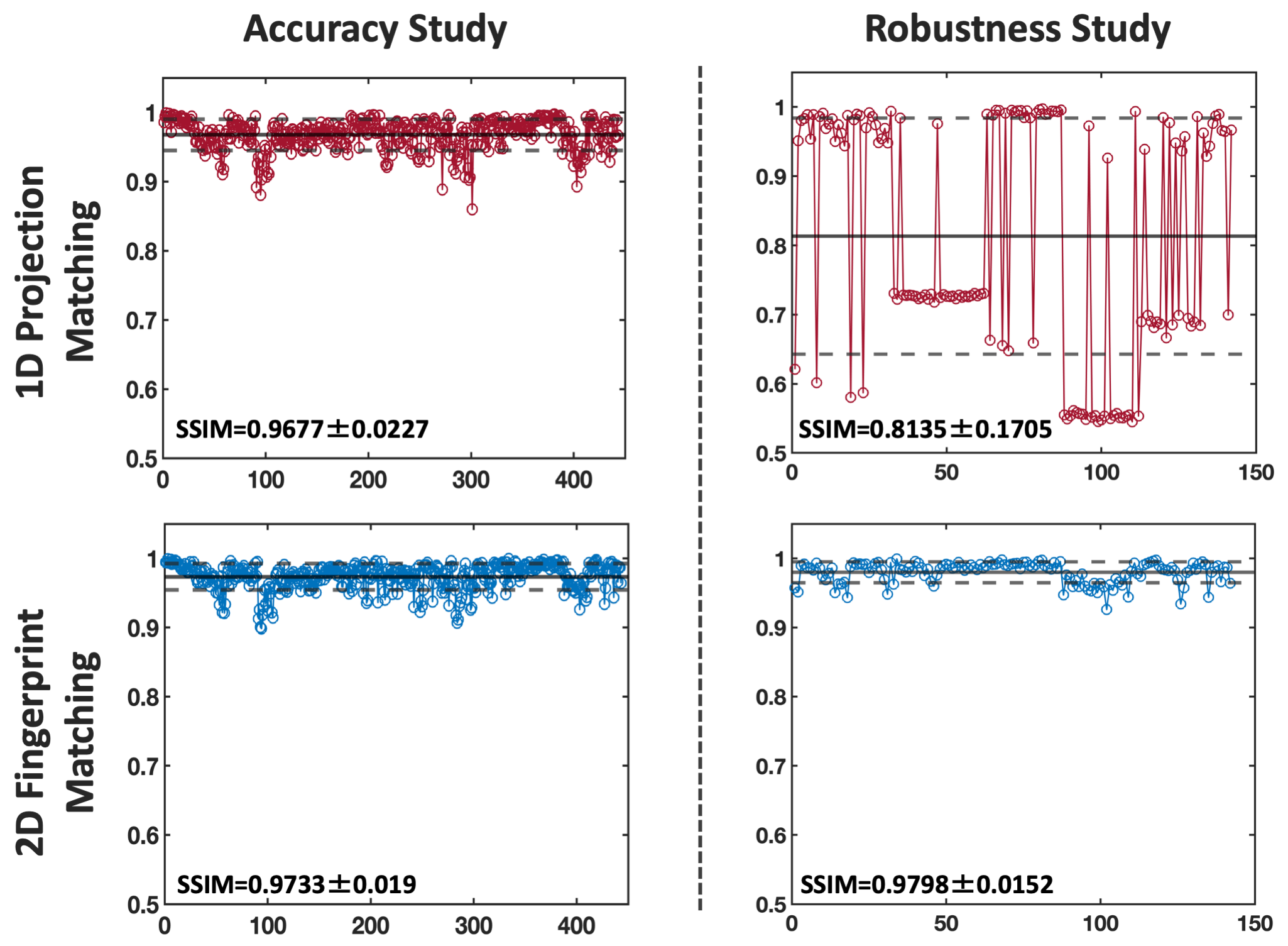
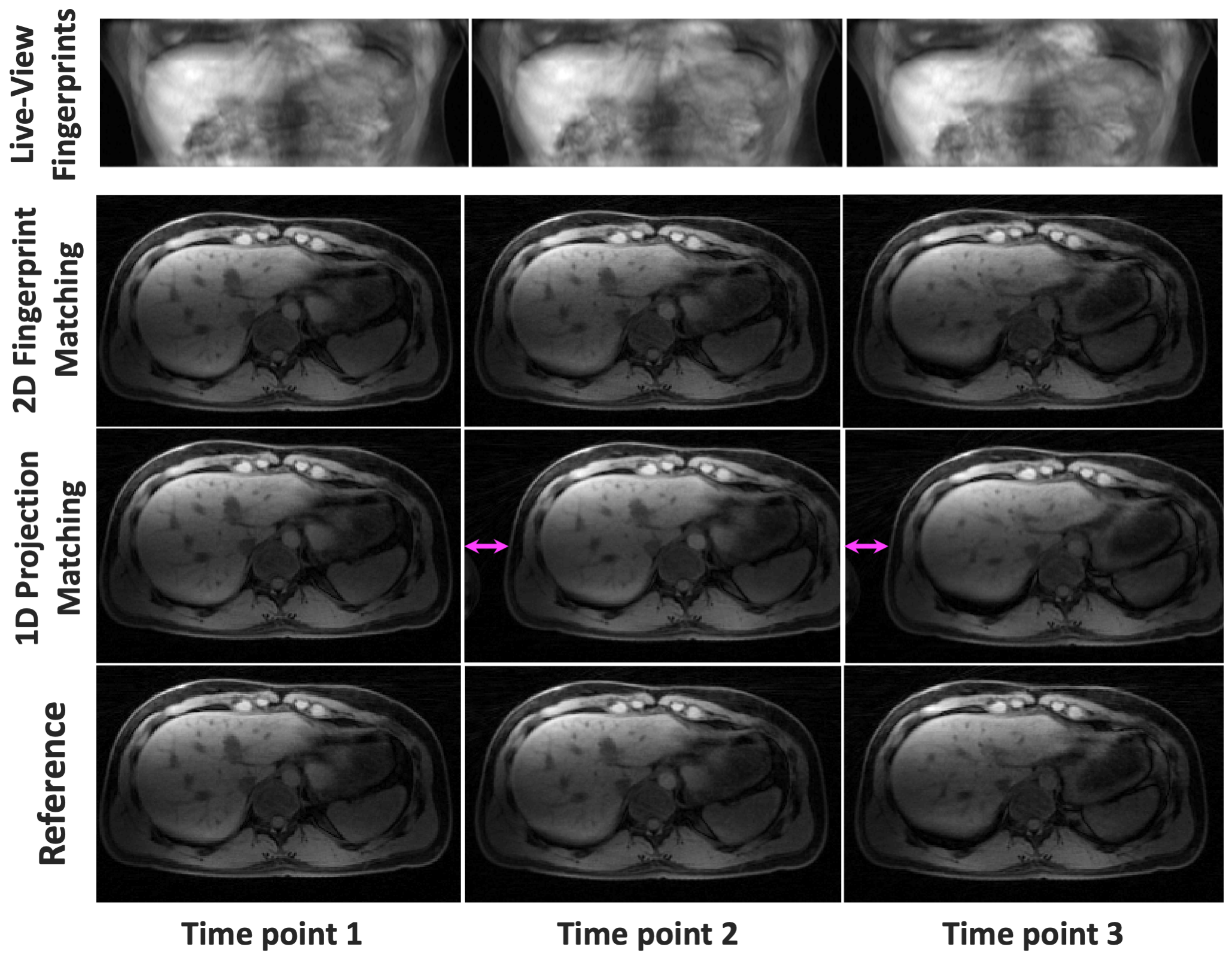
Compared to references images, MR motion fingerprinting accurately and efficiently generates real-time volumetric images, as shown in Figure 4. Compared to previous approaches that are based on 1D projection matching (11, 12), 2D fingerprint matching is significantly more accurate and robust towards movement that may occur during treatment. One example of such comparison is shown in Figure 5, which indicates that 2D fingerprint matching can be systemically more robust and accurate compared to 1D projection matching, suggesting the potential value MR motion fingerprinting in MRI-Linac.
Conclusion
This work proposed a novel framework called MR motion fingerprinting, which enables real-time 3D imaging with low imaging latency and high imaging fidelity. MR fingerprinting proposes several novel components, including (a) truly real-time 3D MRI acquisition and reconstruction without the need for motion detection and motion-guided data sorting, and (b) a new Navistar sampling strategy that acquires 2D motion fingerprints for accurate and robust data matching in the live-view mode. These new components ensure that MR motion fingerprinting is robust to motion drift, body movement, and other uncertainties that we must take into consideration for motion management in MRI-Linac applications.Acknowledgements
This work was supported in part by the NIH (R01EB030549, R01EB031083). The author thanks Dr. Tobias Block for sharing the RAVE sequence and Ding Xia for supporting the sequence implementation. The author also thanks Sera Saju for helping with volunteer and patient recruitment.References
1. Mittauer K, Paliwal B, Hill P, et al.: A New Era of Image Guidance with Magnetic Resonance-guided Radiation Therapy for Abdominal and Thoracic Malignancies. Cureus 2018; 10.
2. Corradini S, Alongi F, Andratschke N, et al.: MR-guidance in clinical reality: current treatment challenges and future perspectives. Radiat Oncol 2019 141 2019; 14:1–12.
3. Pollard JM, Wen Z, Sadagopan R, Wang J, Ibbott GS: The future of image-guided radiotherapy will be MR guided. Br J Radiol 2017; 90.
4. Hall WA, Paulson ES, van der Heide UA, et al.: The transformation of radiation oncology using real-time magnetic resonance guidance: A review. Eur J Cancer 2019; 122:42–52.
5. Yuan J, Poon DMC, Lo G, Wong OL, Cheung KY, Yu SK: A narrative review of MRI acquisition for MR-guided-radiotherapy in prostate cancer. Quant Imaging Med Surg 2022; 12:1585.
6. Raaymakers BW, Jürgenliemk-Schulz IM, Bol GH, et al.: First patients treated with a 1.5 T MRI-Linac: clinical proof of concept of a high-precision, high-field MRI guided radiotherapy treatment. Phys Med Biol 2017; 62:L41.
7. Lagendijk JJW, Raaymakers BW, Raaijmakers AJE, et al.: MRI/linac integration. Radiother Oncol 2008; 86:25–29.
8. Goodburn RJ, P Philippens ME, Lefebvre TL, et al.: The future of MRI in radiation therapy: Challenges and opportunities for the MR community. Magn Reson Med 2022; 88:2592–2608.
9. Feng L, Wen Q, Huang C, Tong A, Liu F, Chandarana H: GRASP-Pro: imProving GRASP DCE-MRI through self-calibrating subspace-modeling and contrast phase automation. Magn Reson Med 2020; 83:94–108.
10. Feng L: 4D GRASP MRI at Sub-Second Temporal Resolution. NMR Biomed. 2022 Oct 19;e4844. doi: 10.1002/nbm.4844. Online ahead of print.
11. Feng L, Tyagi N, Otazo R: MRSIGMA: Magnetic Resonance SIGnature MAtching for real-time volumetric imaging. Magn Reson Med 2020; 84:1280–1292.
12. Han P, Chen J, Xiao J, et al.: Single projection driven real-time multi-contrast (SPIDERM) MR imaging using pre-learned spatial subspace and linear transformation. Phys Med Biol 2022; 67.
Figures