0347
Comparison of dynamic B0 mapping approaches at 7T – AI-based prediction via U-net vs measurement via dual-echo EPI navigator1High Field MR Center, Department of Biomedical Imaging and Image-guided Therapy, Medical University of Vienna, Vienna, Austria, 2Computational Imaging Research Lab, Department of Biomedical Imaging and Image-guided Therapy, Medical University of Vienna, Vienna, Austria, 3Department of Neurosurgery, Medical University of Vienna, Vienna, Austria, 4High Field MR Center, Center for Medical Physics and Biomedical Engineering, Medical University of Vienna, Vienna, Austria, 5Medical University of Vienna, Vienna, Austria
Synopsis
Keywords: Motion Correction, Brain
The abstract compares two approaches to dynamically estimate B0 maps at 7T. The U-net predicts B0 maps based on the initial B0 map and the movement information. The dual-echo EPI-based navigator directly measures B0 maps. Both methods yield comparable results. However, the deep learning approach could overcome the major disadvantage of the EPI-based navigator, thus the need for the dead time in the parent sequence, if the motion can be mapped externally.Introduction
Time-expensive MRI/MRSI sequences require a stable and homogeneous B0 field. Due to the prolonged time, such sequences are sensitive to the patient’s movements, which not only causes motion artifacts but also decreases the homogeneity of the B0 field. For ultra-high-field MR scanners, such effects are increasingly problematic (1). Dual-echo EPI-based volumetric navigators(2), as an example of an internal navigator, pose a solution for estimating B0 maps and dynamically updating the respective B0 shim terms prospectively. The successful deployment of these navigators requires a sufficiently long dead time in the “parent” sequence(3), in the order of a few hundred milliseconds, to acquire the navigator information and to allow subsequent processing of these data (in case of online utilization of acquired information). Last year, a deep learning approach to map the changes in the B0 field within the brain was proposed (4). However, the approach was compared only to sub-optimal approaches. Here we present a comparison of the deep learning approach to the dual-echo EPI-based navigator.Methods
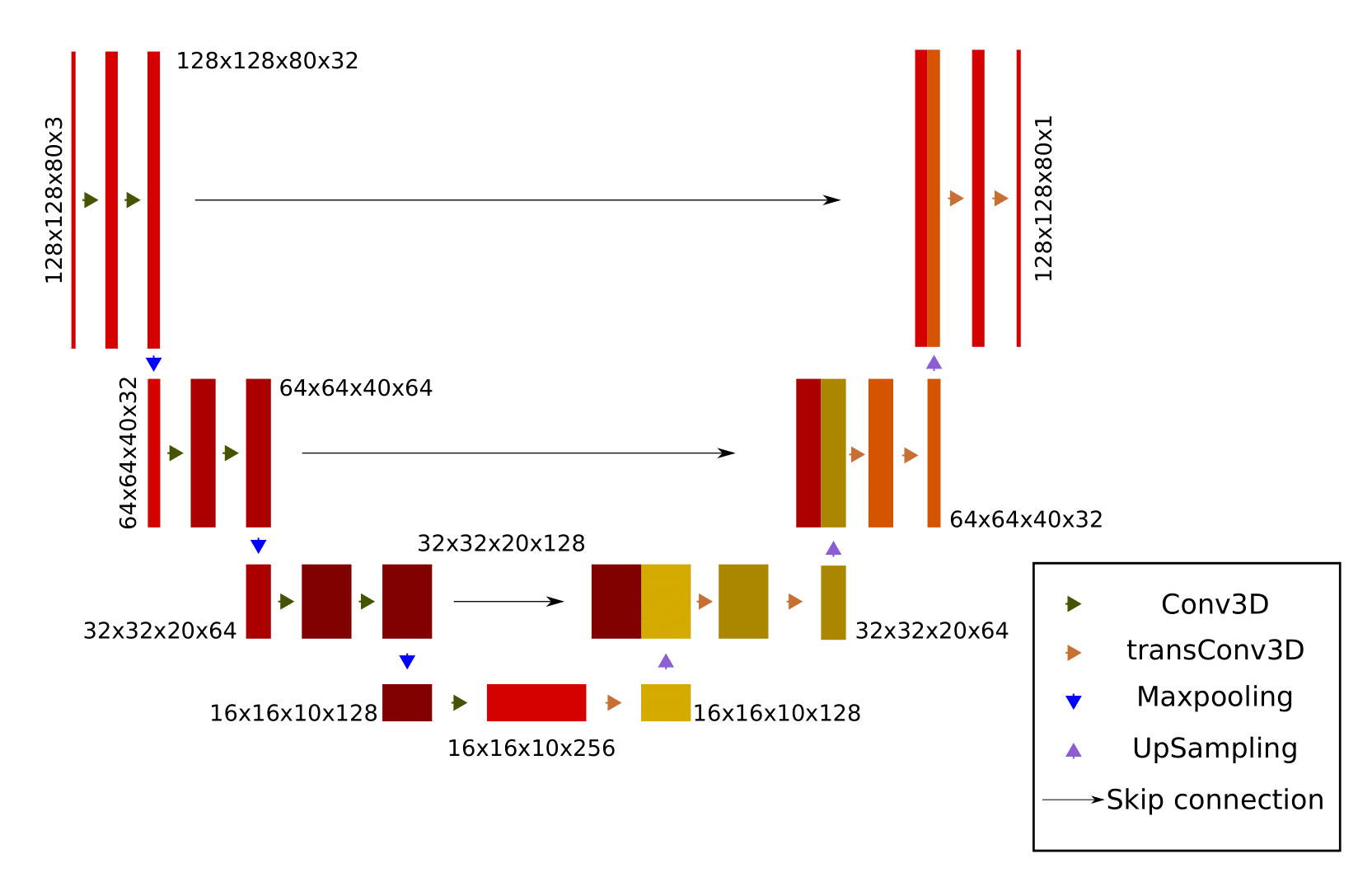
11 healthy volunteers were scanned at 7T Magnetom+ MR scanner (Siemens Healthineers, Erlangen, Germany) with a 32-channel head coil (Nova Medical). For each volunteer, at 30 different head positions, B0 maps were measured with two sequences: multi-echo GRE (TR: 1410 ms, TEs: 3/6/9/12/15 ms, Matrix size: 128x128x80, Resolution: 1.9x1.9x2 mm, GRAPPA factor: 4, TA: 0:59, FA: 55 degrees ) and dual-echo EPI (TR: 9.0 ms, TEs: 3.8/4.8 ms, Resolution: 8x8x8 mm, EPI factor: 16, TA: 0.6 sec., FA: 2 degrees). At the initial position, MP2RAGE was acquired for anatomical reference. U-Net was trained to predict the B0 maps for new positions (Figure 1). Input to the network consists of (I) B0 map of the initial position, (II) MP2RAGE of the initial position (III) MP2RAGE of the new position, estimated by applying a 6-DOF transformation matrix, which defines the change between the initial and the new positions. The transformation matrices were estimated from the 6-DOF co-registration (FLIRT, FSL toolbox (5)) between the magnitude images of the first echo of the GRE sequence at the initial (first) position and the following 29 positions. Augmentation of the training dataset was performed by the addition of the same randomly scaled spherical harmonics of the shimming system to the B0 maps of a training instance. Data were split into training and testing datasets in the 9:1 ratio. The U-net was trained for 400 epochs. The Adam optimizer was used with a learning rate of 2.5e-5, and weight decay of 1e-7. For each epoch, new augmentations were recalculated. The loss function was a mean-squared error and the mini-batch size was 10 instances. The B0 maps predicted by deep learning, the EPI-based B0 maps, and the no correction approach were compared against ground truth data. B0 maps measured with a multi-echo GRE sequence were assumed to be the ground truth. The “no correction approach” is comparing B0 maps at two different head positions. EPI-based B0 maps were interpolated to a higher spatial resolution by bicubic interpolation. Boxplots of residua maps were calculated per each position. For the overall comparison of methods, median values of residua maps of each position were calculated and results were plotted as a boxplot. B0 maps of both method and their residua to the ground truth were qualitatively inspected. All calculations were performed on a DGX station equipped with four Tesla V100 GPU cards (Nvidia, Santa Clata, CA, US). PyTorch was used (6).Results
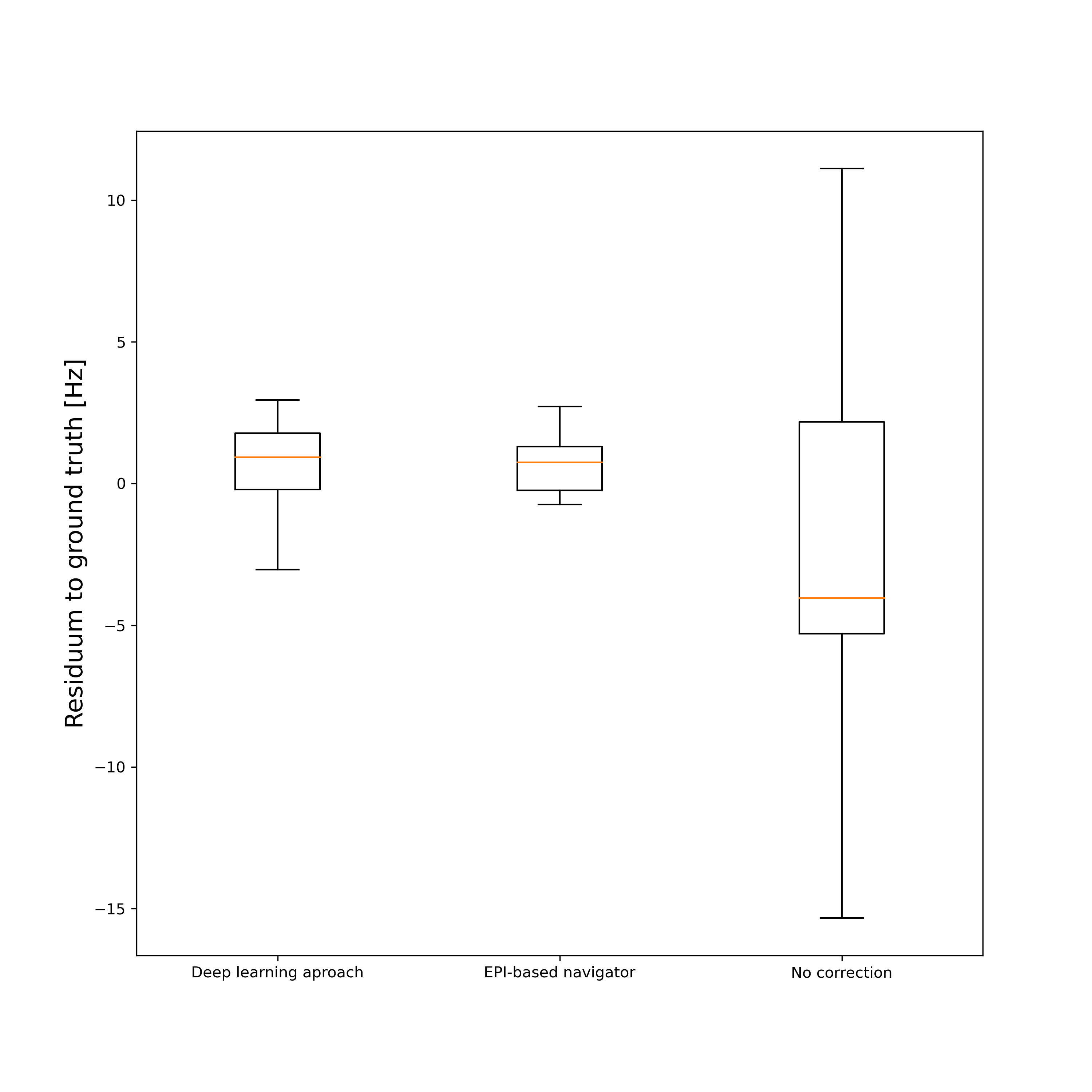
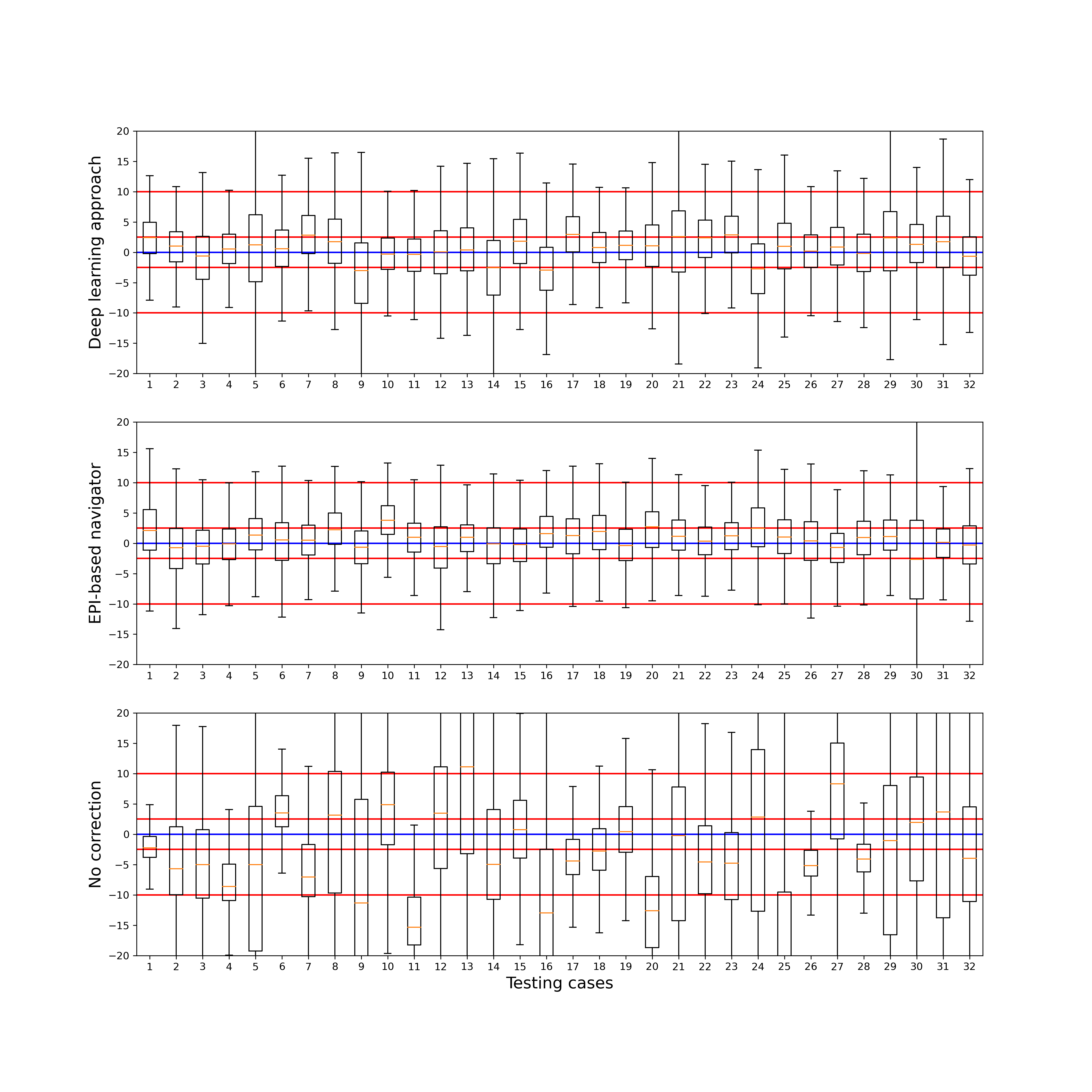
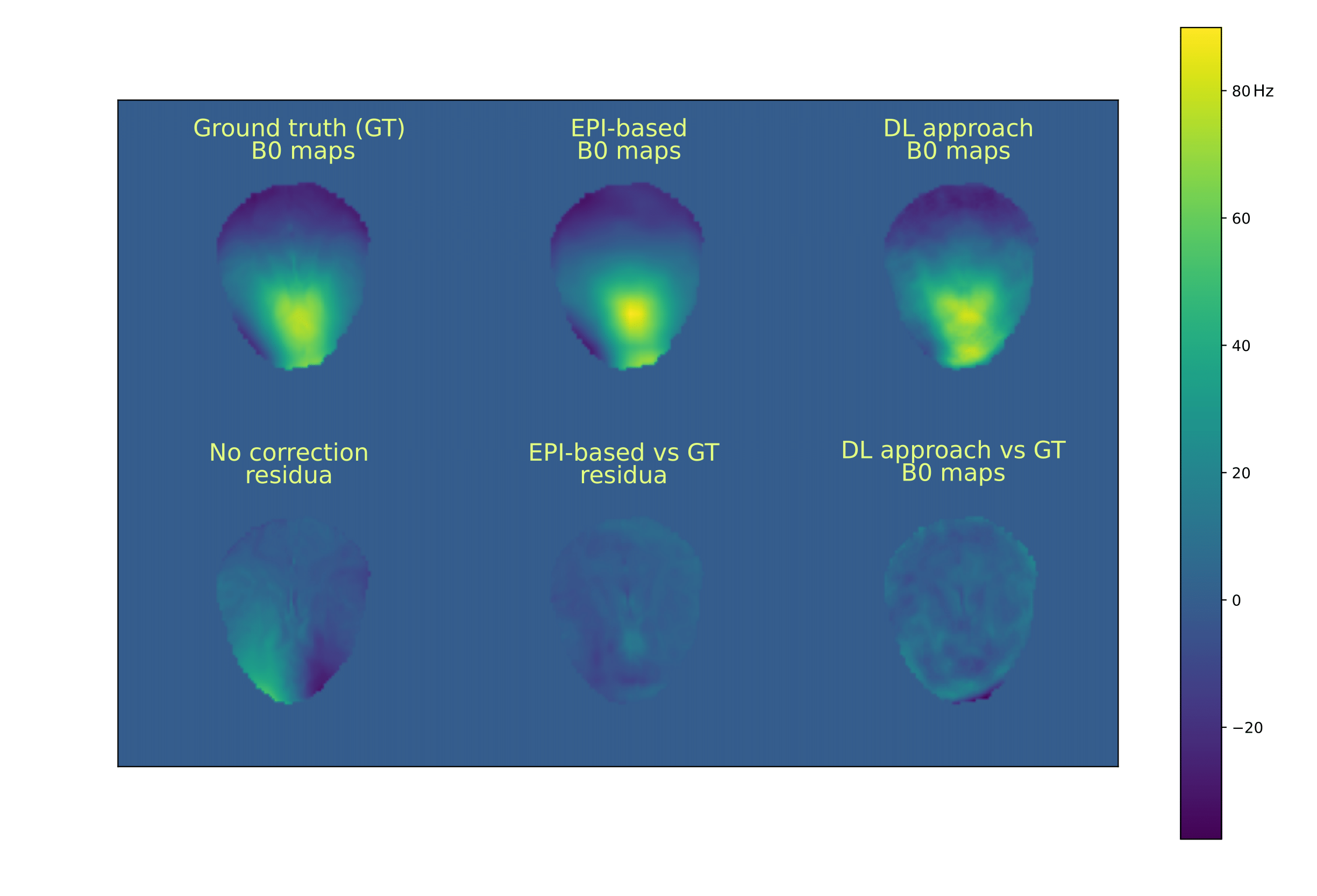
The results of the overall comparison between the methods and the ground truth are depicted in Figure 2. The median of the no-correction approach was -4.03 Hz, with an inter-quantile range (IQR) of 7.48 Hz. The median of EPI-based B0 maps was 0.74 Hz, with IQR: of 1.53 Hz. The median of the deep learning approach was 0.92 Hz, with IQR of 1.99 Hz. The results of the comparison per each instance in the testing dataset are depicted in Figure 3. The red lines depict the +-2.5 and +-10 Hz levels. B0 maps of all approaches and their residua to the ground truth are depicted in Figure 4.Discussion & Conclusion
The abstract present comparison of two approaches to dynamically estimate B0 maps at 7T. The dual-echo EPI-based navigator is commonly used if it can be inserted into the parent sequence. The deep learning approach predicts the B0 maps from the B0 maps at the initial position and 6-DOF description of motion. However, the estimated B0 map should be ideally further used to compensate for the motion-induced changes of the B0 field. The deep learning approach could estimate B0 maps with higher spatial resolution while the EPI-based method is limited by the dead time in the parent sequence. Based on the presented results both methods yield similar results. The deep learning approach overcomes the requirement of a dead time in the parent sequence, which is the major limitation of dual-echo EPI-based navigators.Acknowledgements
FWF grant P 34198References
1. Juchem C, de Graaf RA. B0 magnetic field homogeneity and shimming for in vivo magnetic resonance spectroscopy. Anal. Biochem. 2017;529:17–29 doi: 10.1016/J.AB.2016.06.003.
2. Hess AT, Tisdall MD, Andronesi OC, Meintjes EM, Kouwe AJW van der. Real-time motion and B0 corrected single voxel spectroscopy using volumetric navigators. Magn. Reson. Med. 2011;66:314–323 doi: 10.1002/MRM.22805.
3. Heckova E, Považan M, Strasser B, et al. Real-time Correction of Motion and Imager Instability Artifacts during 3D γ-Aminobutyric Acid-edited MR Spectroscopic Imaging. Radiology 2018;286:666–675 doi: 10.1148/RADIOL.2017170744.
4. Motyka S, Weiser P, Bachrata B, et al. Predicting changes in B0 field due to patient movement dynamically for MRI via Deep Learning. In: Proceedings of joint annual meeting ISMRM-ESMRMB 2022 & ISMRT annual meeting. ; 2022. p. 966.
5. Jenkinson M, Bannister P, Brady M, Smith S. Improved Optimization for the Robust and Accurate Linear Registration and Motion Correction of Brain Images. 2002 doi: 10.1006/nimg.2002.1132.
6. Paszke A, Gross S, Chintala S, et al. Automatic differentiation in PyTorch. In: NIPS-W. ; 2017.
Figures