2453
Adaptive k-Space Sampling in Magnetic Resonance Imaging Using Reinforcement Learning1Department of Physics of Molecular Imaging Systems, Institute for Experimental Molecular Imaging, RWTH Aachen University, Aachen, Germany, 2Philips Research, Eindhoven, Netherlands, 3Department of Mathematics and Computer Science, Eindhoven University of Technology, Eindhoven, Netherlands, 4Physics Institute III B, RWTH Aachen University, Aachen, Germany, 5Fraunhofer Institute for Digital Medicine MEVIS, Bremen, Germany, 6Hyperion Hybrid Imaging Systems GmbH, Aachen, Germany
Synopsis
One approach to accelerate MRI scans is to acquire fewer k-space samples. Commonly, the sampling pattern is selected before the scan, ignoring the sequential nature of the sampling process. A field of machine learning addressing sequential decision processes is reinforcement learning (RL). We present an approach for creating adaptive two-dimensional (2D) k-space trajectories using RL and the so-called action space shaping. The trained RL algorithm adapts to a variety of basic 2D shapes outperforming simple baseline trajectories. By shaping the action space of the RL agent we achieve better generalization and interpretability of the agent.
Introduction
One approach to accelerate MRI scans is to acquire fewer k-space samples. Commonly, the k-space sampling pattern is determined by the selected scan. However, the sampling trajectory of the k-space in MRI can be considered as a sequential decision process in which the amount of information increases with each acquired sample. A field of machine learning addressing sequential decision processes is reinforcement learning (RL). The learner, called the agent in RL, interacts with an environment aiming at maximizing the cumulative reward. The interaction is divided into discrete time steps at which the agent chooses an action based on the information provided by the environment1.Previous research on adaptive sampling approaches focuses on choosing the next k-space line in Cartesian readout schemes2-7. Here, we present an approach for creating adaptive 2D k-space trajectories using reinforcement learning (RL) and action space shaping8 which gives a high interpretability of the agent.
Methods
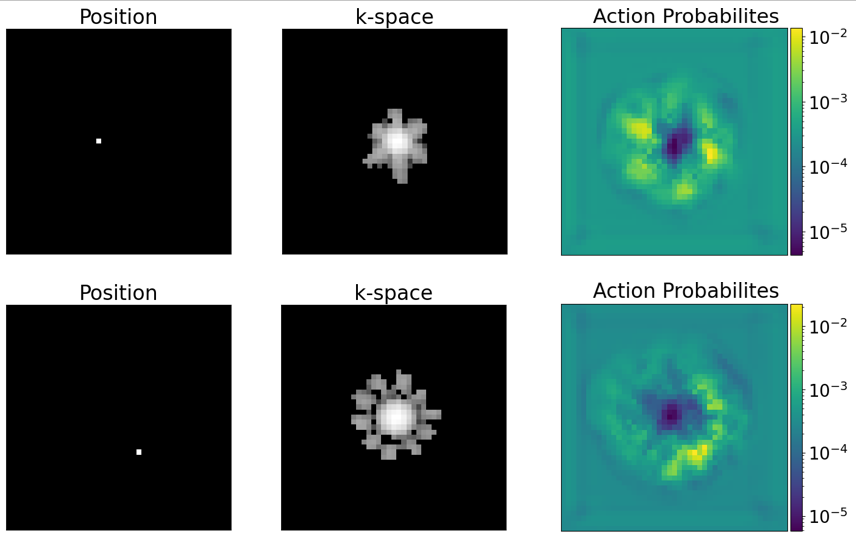
The RL environment is characterized by the following elements:Observation space: The agent receives at every time step the current position in k-space and the zero-filled absolute-valued k-space in logarithmic scale.
Action space: The action space has the same size as the k-space. Thus, a probability is assigned to every k-space pixel regardless of whether selecting this pixel is a valid action as defined by our action space shaping approach.
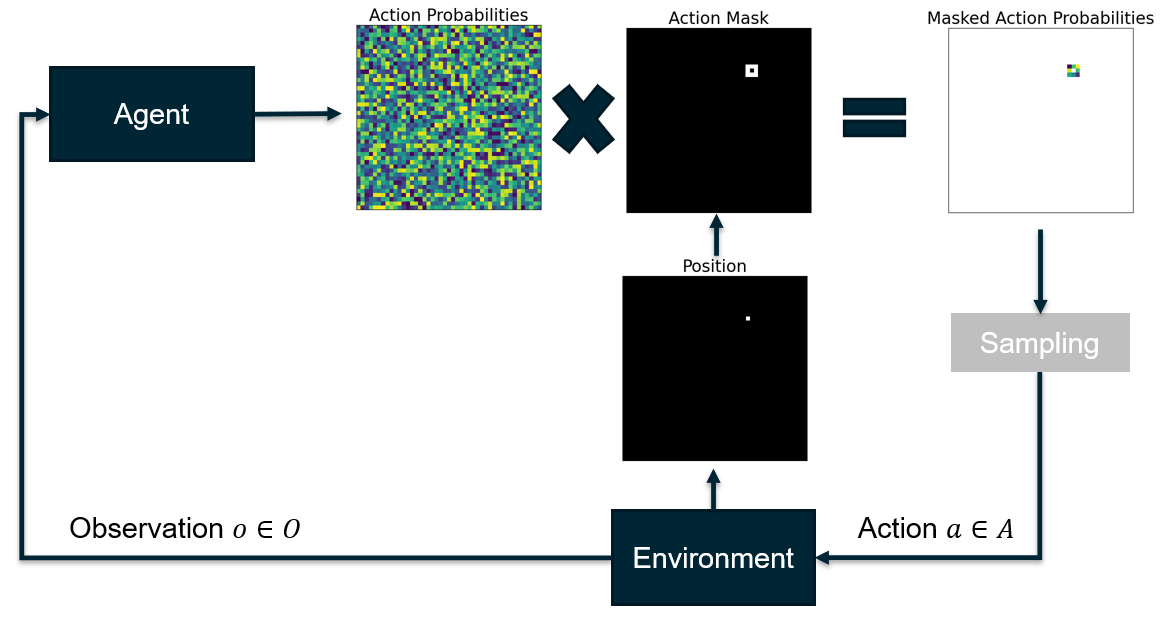
Action space shaping: We constrain the agent to create connected trajectories by only considering sampling neighboring pixels of the current position as valid actions and masking out all other actions (Fig. 1). We use the action masking implementation of Tang et al.9.
Initial state: The agent starts every trajectory at the center of the k-space.
Terminal state: One trajectory ends after 200 time steps, which were chosen here as the maximum number of samples. This allows the agent to sample up to ∼10% of k-space.
Reward function: The reward is the L2 distance of the reconstructed images at two consecutive time steps. The image is reconstructed using an inverse fast Fourier transform of the zero-filled k-space.
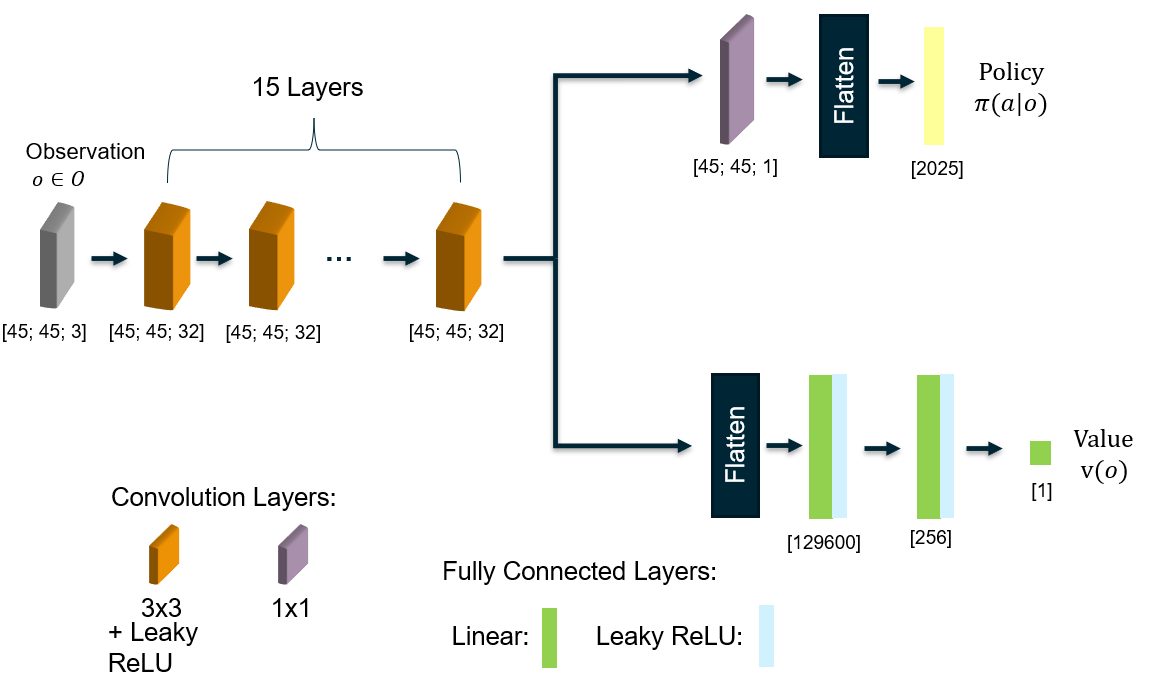
For the implementation of the environment, we use the toolkit Open AI Gym10. For the agent, we use a custom policy network (Fig. 2) and the adaptation of Tang et al.9 of the implementation of the proximal policy optimization algorithm PPO2 provided by the package Stable Baselines12.
The agent is trained for 50 million time steps with a set of 18 simulated k-spaces of size 45x45 using phantoms of basic geometric shapes generated by an adaptation of the geometric shapes generator proposed by El Korchi et al.13. The simulation is performed using the package Virtual Scanner14 and its echoplanar imaging sequence. After training, the agent is tested on a set of unknown k-spaces and the trajectories are created deterministically meaning that always the action with the highest probability is selected.
Results
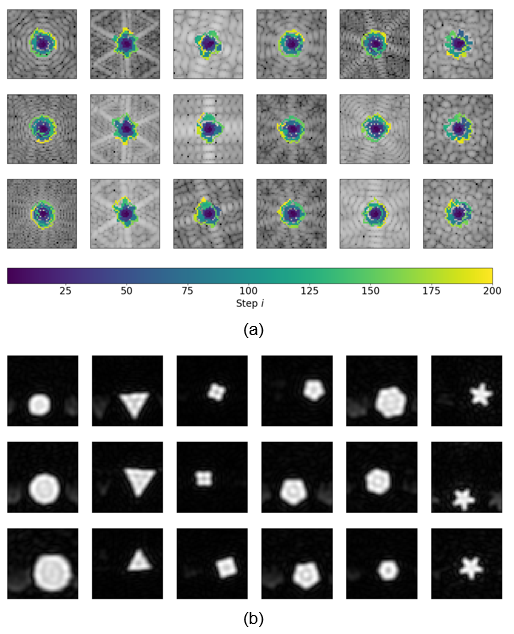
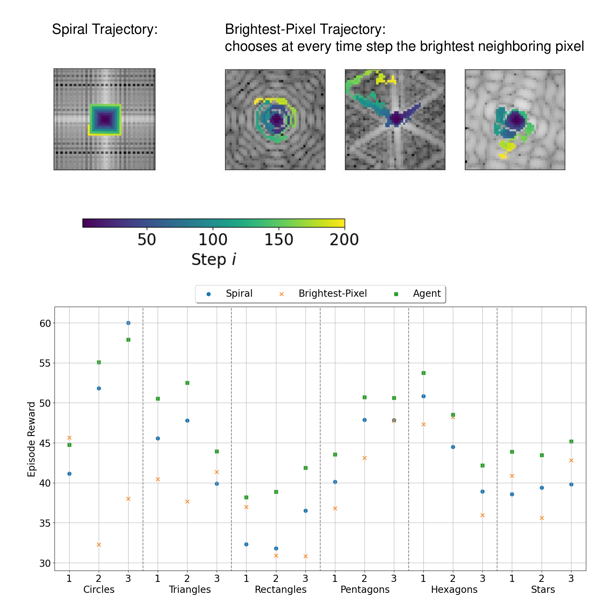
The agent’s trajectories differ depending on the presented k-space and cover characteristic bright patterns in the k-space center (Fig. 3). The episode reward of the agent’s trajectories is higher than simple baseline trajectories for almost all samples in the test set (Fig. 4). The visualization of the action probabilities before the masking operation shows that the probability for sampling a specific k-space pixel decreases after having been sampled (Fig. 5). Furthermore, the action probability is high for some locations that continue the characteristic bright pattern of the k-space.Discussion
The agent adapts its trajectories to unknown k-spaces during acquisition. Giving the agent one action for every k-space pixel and enforcing constraints on the trajectory via action space shaping gives a high interpretability of the trajectory creation by the agent.Furthermore, the constraints on the k-space trajectory can be adapted straightforwardly by changing the action mask. For example, to speed up the acquisition, valid k-space pixels might be at a certain radius from the current position and the trajectory is continued by a straight line to this pixel. This is possible thanks to our action space shaping approach, in which the probabilities are computed for all k-space pixels.
Conclusion
The results show that an RL agent can reasonably adjust k-space trajectories during acquisition. Our presented action space shaping approach gives insight into the reasoning of the agent during trajectory creation. Next steps include combining the agent with a trainable reconstruction and testing the approach on clinical data.Acknowledgements
No acknowledgement found.References
1. Sutton R S, Barto A G. Reinforcement learning: an introduction. The MIT Press, second edition; 2018
2. Bakker T, van Hoof H, Welling M. Experimental design for MRI by greedy policy search. arXiv:2010.16262. 2020.
3. Jin K H, Unser M, Yi K M. Self-supervised deep active accelerated MRI. arXiv:1901.04547. 2019.
4. Pineda L et al. Active MR k-space sampling with reinforcement learning. MICCAI 2020; pp 23-33.
5. Walker-Samuel S. Using deep reinforcement learning to actively, adaptively and autonomously control a simulated MRI. ISMRM 2019.
6. Zhang Z et al. Reducing uncertainty in undersampled MRI reconstruction with active acquisition. 2019 IEEE/CVF CVPR. 2019; pp 2049-2053.
7. Yin T et al. End-to-end sequential sampling and reconstruction for MR imaging. arXiv:2105.06460. 2021.
8. Kanervisto A, Scheller C, Hautamäki V. Action Space Shaping in Deep Reinforcement Learning. 2020 IEEE CoG. 2020; pp 479-486.
9. Tang C-Y, Liu C-H, Chen W-K, You S D. Implementing action mask in proximal policy optimization (PPO) algorithm. ICT Express. 2020; 6(3):200-203.
10. Brockman G et al. Openai gym. arXiv:1606.01540. 2016.
11. Mnih V et al. Asynchronous Methods for Deep Reinforcement Learning. arXiv:1602.01783. 2016.
12. Hill A et al. Stable Baselines. https://github.com/hill-a/stable-baselines; 2018.
13. El Korchi A, Ghanou Y. 2D geometric shapes dataset - for machine learning and pattern recognition. Data in Brief. 2020; 32:106090.
14. Tong G et al. Virtual scanner: MRI on a browser. Journal of Open Source Software. 2019; 4(43):1637.
Figures