2063
Rotation estimation for cloverleaf navigators using a k-space map simulation
Tamsin Edwards Lambourne1,2, André J. W. van der Kouwe1,3, and Robert Frost1,3
1Athinoula A. Martinos Center for Biomedical Imaging, Department of Radiology, Massachusetts General Hospital, Charlestown, MA, United States, 2Northeastern University, Boston, MA, United States, 3Department of Radiology, Harvard Medical School, Boston, MA, United States
1Athinoula A. Martinos Center for Biomedical Imaging, Department of Radiology, Massachusetts General Hospital, Charlestown, MA, United States, 2Northeastern University, Boston, MA, United States, 3Department of Radiology, Harvard Medical School, Boston, MA, United States
Synopsis
Short <5 ms cloverleaf navigators have been demonstrated for prospective motion correction at a rate of 71 Hz in steady-state FLASH. The original cloverleaf approach required a 12 second k-space mapping pre-scan to reliably deal with out-of-plane rotations. Here we investigate simulation of a k-space map based on a low spatial resolution pre-scan. The approach shows potential for real-time detection of rigid-body rotation in the context of real-time self-correction of the cloverleaf orientation.
Introduction
K-space navigators can provide rigid-body head motion information from short (<5ms) acquisitions1-3. The cloverleaf navigator combines three orthogonal linear navigators4 with three arcs of orbital navigators5 in a continuous k-space measurement shown in Figure 1, with 71 Hz prospective head motion correction demonstrated in FLASH2.The linear sections of the cloverleaf provide object translation information from the k-space linear phase differences relative to reference sections. The orbital arc sections contain rotation information; rotations about an axis perpendicular to an arc shift the k-space magnitude values along the arc5. However, in general, out of plane rotation results in different locations of the object’s k-space being sampled by the cloverleaf. In the original FLASH implementation, out-of-plane rotations were estimated based on a map of rotated cloverleaf navigators. The map was acquired by rotating the imaging gradients in a 12sec pre-scan. During the subsequent scan, rotations were calculated based on matching cloverleaf navigators to the map. The cloverleaf navigators were prospectively corrected to ensure that navigators were continually corrected back within the map, and applied corrections were accumulated to enable motion tracking over several degrees/mm.
Here we investigate estimating head rotations without using an acquired map of rotated cloverleafs, which is a limitation e.g. in sequences with a longer TR than FLASH. As in the original demonstration, the approach is intended to be used to prospectively self-correct the cloverleaf orientation at high temporal frequency, to ensure that incremental (between-cloverleaf) rotations of the object relative to the cloverleaf are small2. A cloverleaf simulation was used to construct a map of rotated cloverleafs, which was then used to estimate rotation of subsequently acquired navigators.
Methods
Cloverleaf simulationThe first input to the simulation is the k-space trajectory (Fig. 1) obtained by integrating the cloverleaf gradients. The trajectory was scaled so that the arc sections were at 0.125mm-1 (8mm resolution). The second input was the fully sampled k-space from a 4mm isotropic resolution image acquisition. A single channel of 2-channel body coil data was used. Then to simulate a cloverleaf at a given position and orientation relative to the image, translation was applied with linear phase and the k-space was sampled based on the rotated trajectory. Rotated trajectories, the input imaging data, and the resulting simulated signal are shown in Fig. 2.
Rotation estimation with map simulation
The k-space map was constructed from simulated cloverleaf data based on the icosahedron approach2. For each of 21 unique axes defined by the vertices of an icosahedron, a range of rotations was simulated using quaternion rotation representations. Then linear regression was trained on the map data and the Euler angle representations. The trained model was applied to acquired cloverleaf navigators.
Maps with course/fine angular sampling resolution (at fixed extent) were generated for comparison of motion estimation. Alternative inputs for the regression were compared:
- Using only the arcs of the cloverleaf signal
- Using the complete cloverleaf signal (including the linear sections for translation)
Data acquisition
A healthy volunteer was scanned at 3T under an approved institutional review board protocol. A 4mm isotropic resolution FLASH image (see Fig. 1E) was acquired for k-space map simulation with the following parameters: TE=2.7ms; FOV=256mm; BW=600Hz/px. A 45sec cloverleaf scan (Fig. 1D) was acquired with the cloverleaf acquisition starting at 2.7ms (followed by imaging at TE=8ms). TR=13ms, 5° water-selective excitation and body-coil reception were used for both the reference and cloverleaf scans.
During the cloverleaf scan the volunteer moved intentionally (order: right-up-left-down-original-z translation-original) and head motion was estimated with optical tracking6,7 for comparison.
Results
Figure 3 compares motion tracking from the cloverleaf navigators with optical motion tracking. Cloverleaf estimates of x rotation are in qualitative agreement, whereas y and z rotation appear less reliable, potentially due to the reduced SNR and increasing B0 effects later in the cloverleaf readout. Translation estimates from the linear sections appear to be reliable.Figure 4A shows how using the full magnitude signal from the cloverleaf provided better estimates than simply using the arc sections. Figure 4B suggests bias in estimates at low angular resolution in the simulated map and increased noise with higher angular resolution.
Discussion
K-space map simulation using a low-resolution pre-scan may provide sufficient rotation estimation for cloverleaf navigators even in the context of out-of-plane rotations and is an efficient algorithm suitable for real-time use. The intended use of this approach is for real-time rotation estimation and prospective self-correction of the cloverleaf orientation, which will be investigated in future work. Other areas of future work include comparisons with estimation based on an acquired cloverleaf map and using multi-channel navigator data.Conclusions
Rotation estimation from a simulated cloverleaf k-space map shows potential for avoiding a mapping acquisition. The approach will be investigated further in the context of prospective self-correction of the cloverleaf orientation.Acknowledgements
We are grateful for funding from the National Institute of Biomedical Imaging and Bioengineering (R21EB029641), the Eunice Kennedy Shriver National Institute of Child Health and Human Development (R01HD085813, R01HD093578, R01HD099846) and Shared Instrumentation grants (S10OD025253 and MGH ECOR, 1S10RR023401, 1S10RR019307, and 1S10RR023043).References
- Welch EB, Manduca A, Grimm RC, Ward HA, Jack CRJ. Spherical navigator echoes for full 3D rigid body motion measurement in MRI. Magn Reson Med 2002;47:32–41.
- van der Kouwe AJW, Benner T, Dale AM. Real-time rigid body motion correction and shimming using cloverleaf navigators. Magn Reson Med 2006;56:1019–1032.
- Buschbeck RP, Yun SD, Jon Shah N. 3D rigid-body motion information from spherical Lissajous navigators at small k-space radii: A proof of concept. Magn Reson Med 2019;82:1462–1470.
- Ehman RL, Felmlee JP. Adaptive technique for high-definition MR imaging of moving structures. Radiology 1989;173:255–263.
- Fu ZW, Wang Y, Grimm RC, Rossman PJ, Felmlee JP, Riederer SJ, Ehman RL. Orbital navigator echoes for motion measurements in magnetic resonance imaging. Magn Reson Med 1995;34:746–753.
- Olesen OV, Paulsen RR, Hojgaard L, Roed B, Larsen R. Motion tracking for medical imaging: a nonvisible structured light tracking approach. IEEE Trans Med Imaging 2012;31:79–87.
- Frost R, Wighton P, Karahanoglu FI, Robertson RL, Grant PE, Fischl B, Tisdall MD, van der Kouwe A. Markerless high-frequency prospective motion correction for neuroanatomical MRI. Magn Reson Med 2019;82:126–144.
Figures
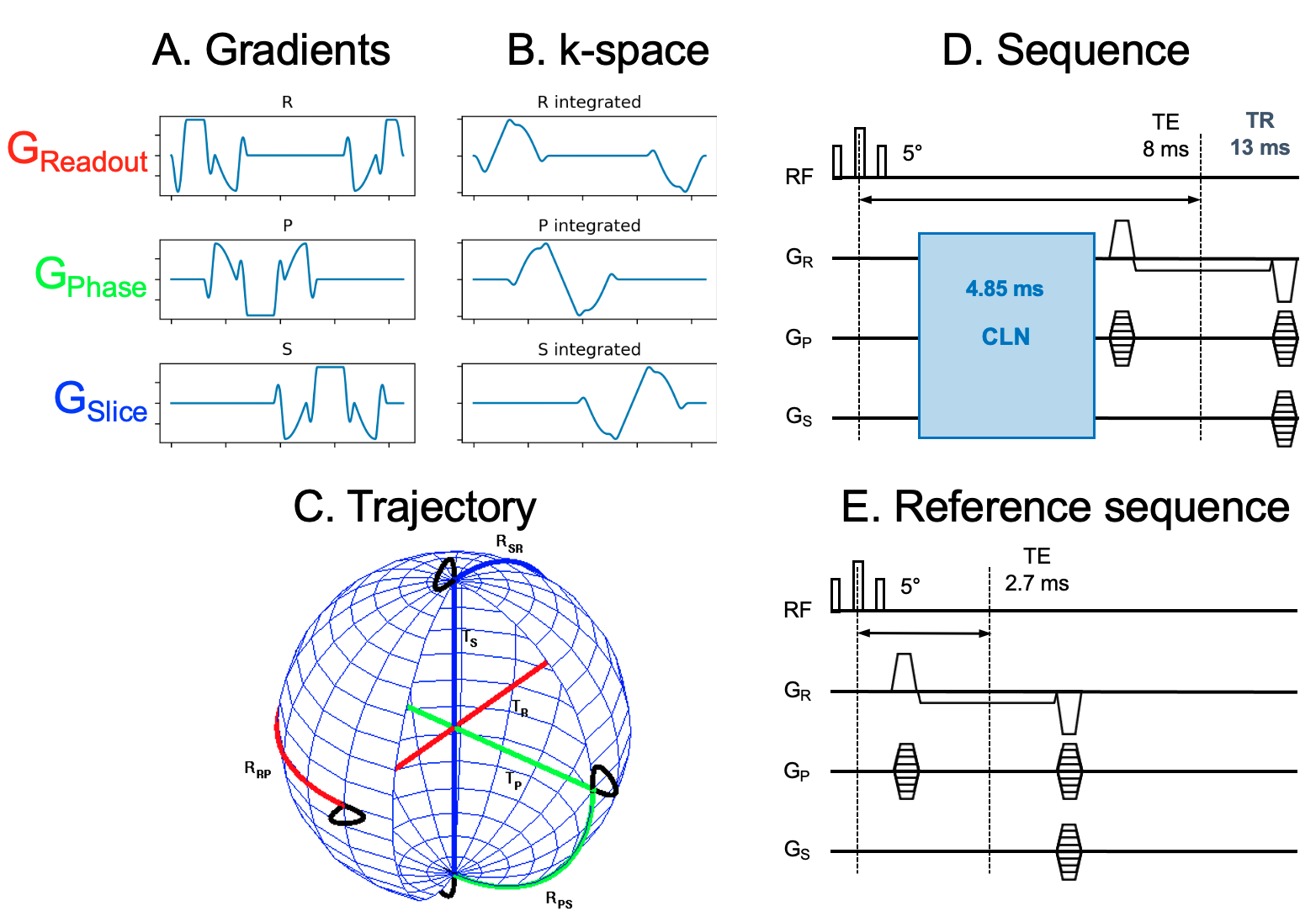
Figure 1: (A) Cloverleaf navigator gradients, corresponding k-space locations, and (C)
3D trajectory. A 3D FLASH scan (D) with cloverleafs and (E) the associated
reference image acquisition.
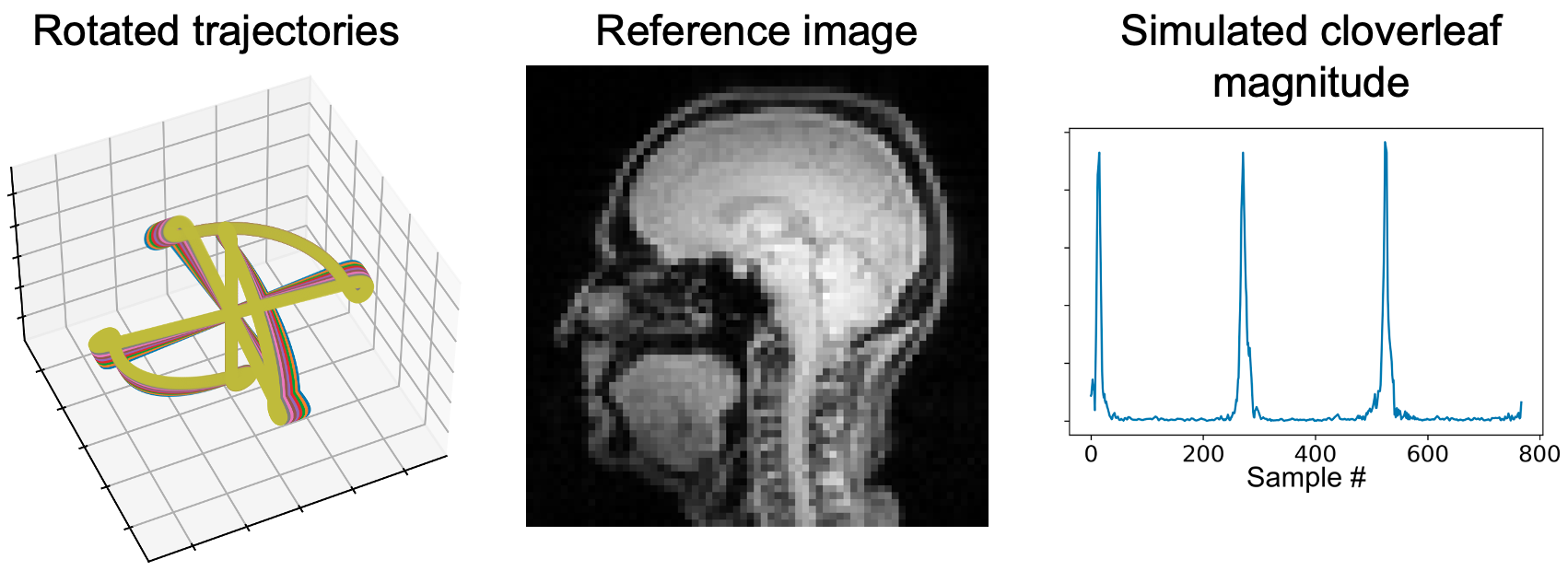
Figure 2: Overview of the
approach used to simulate the cloverleaf k-space map. For each rotation of the
trajectory, cloverleaf signals are generated by sampling the k-space from the
reference acquisition. 21 unique vertices of an icosahedron are used as the
axes of rotation and e.g. 9 rotations are sampled symmetrically about each
axis.
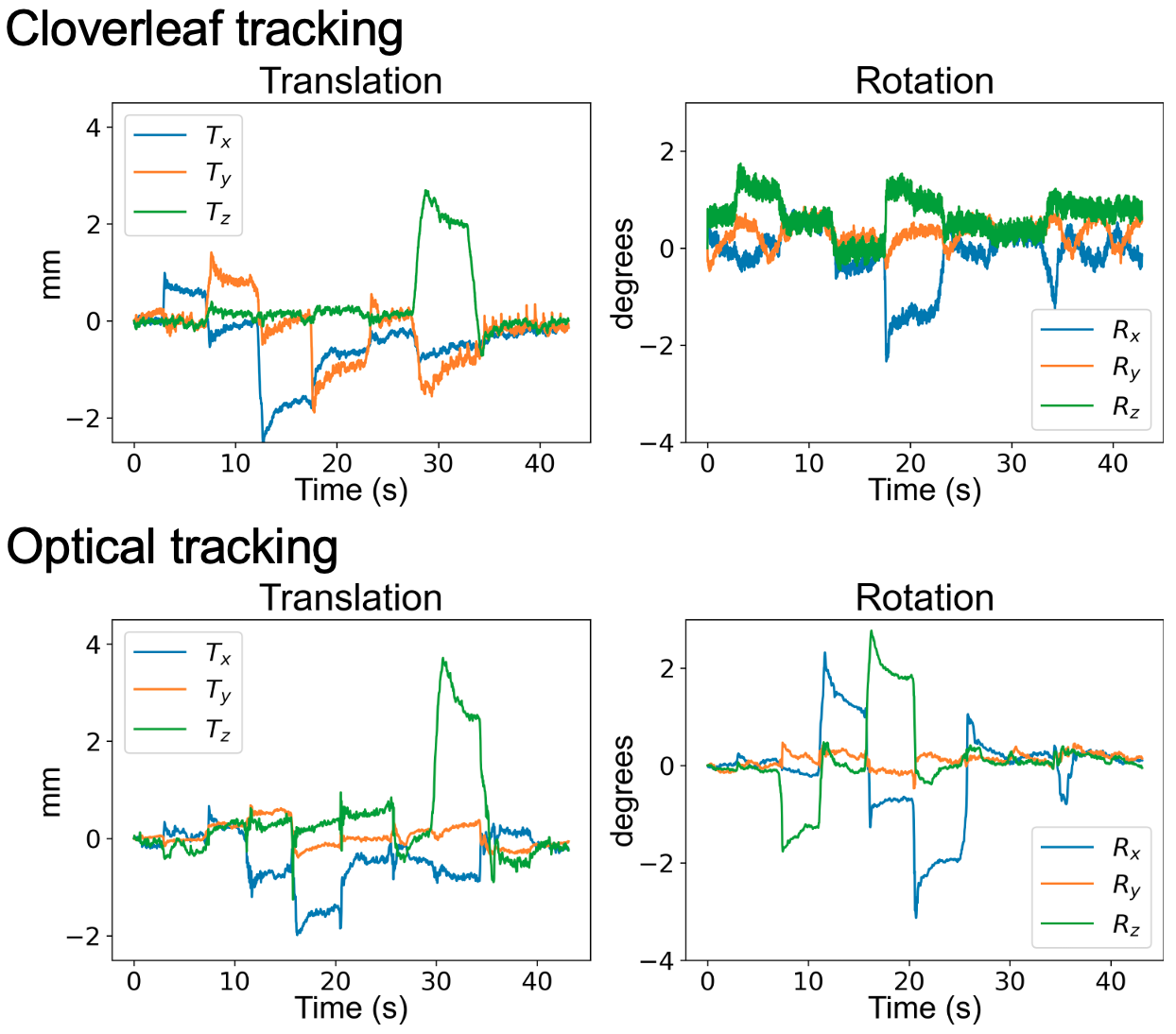
Figure 3: Comparison of cloverleaf navigator motion estimation using a simulated
k-space map versus optical motion estimation.
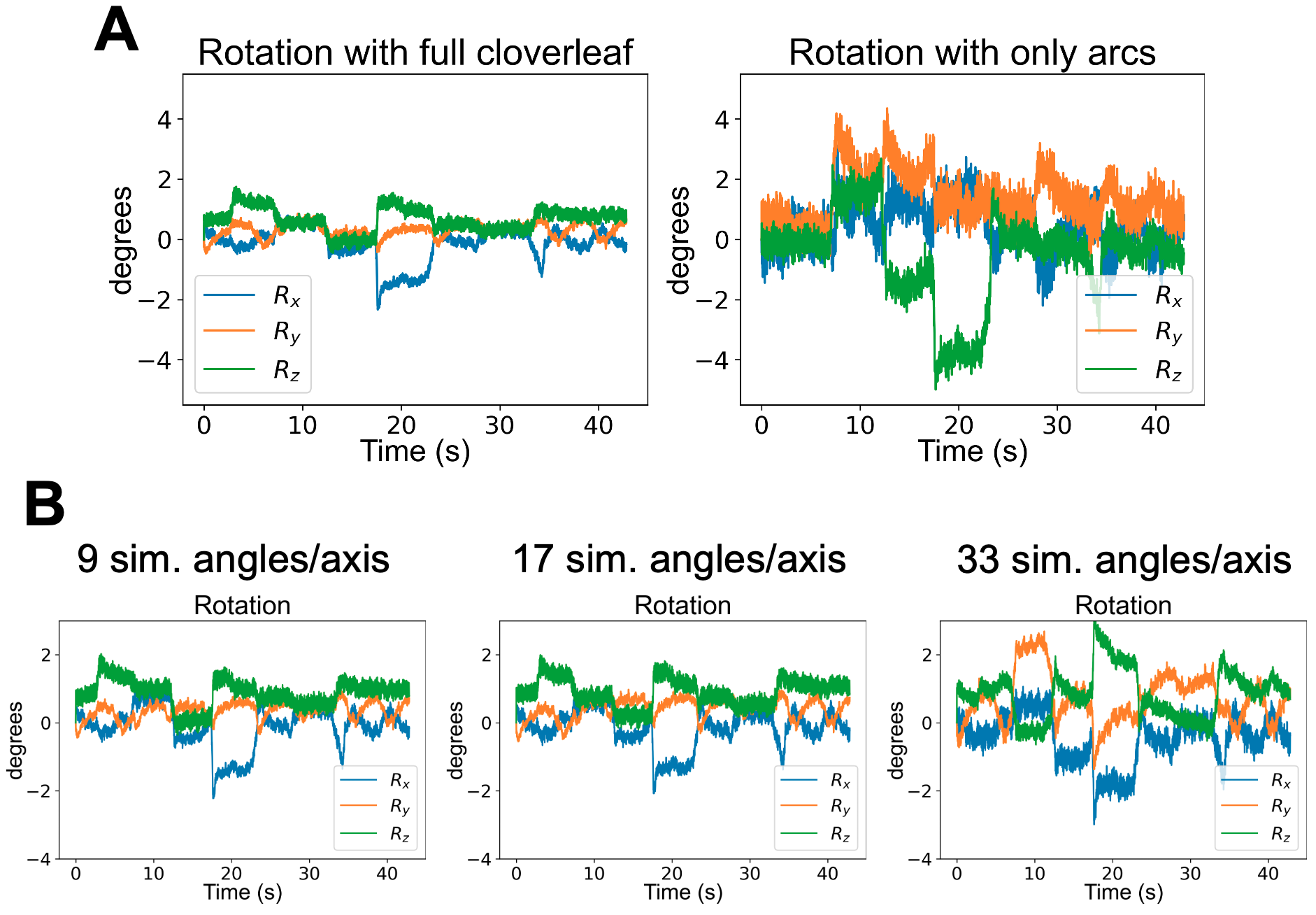
Figure 4: (A) Comparison of map simulation based estimation using the full
simulated cloverleaf signal versus using only the orbital arc sections for
training the regression of motion parameters. (B) Comparison of motion
estimation with increasing angular resolution in the simulated k-space map.
DOI: https://doi.org/10.58530/2022/2063