1603
GRASP-Pro+: GRASP reconstruction with locally low-rank subspace constraint for DCE-MRI1Department of Radiology, MRI Research Institute, Weill Cornell Medicine, New York, NY, United States, 2Department of Radiology, New York University, New York, NY, United States, 3BioMedical Engineering and Imaging Institute, Icahn School of Medicine at Mount Sinai, New York, NY, United States
Synopsis
While the globally low-rank (GLR) model has been demonstrated to be effective in representing global contrast change, it is expected to be less effective for spatially localized signal dynamics. In this work, we propose an improved reconstruction framework, which extends GRASP-Pro using a locally low-rank (LLR) model to represent spatially localized dynamics based on clusters or patches information. This approach has been tested in multiple DCE applications including both cancer and healthy subjects. In addition, we propose an anatomical cluster-based reconstruction approach for brain DCE-MRI.
INTRODUCTION
The combination of golden‐angle radial imaging with compressed sensing image reconstruction has gained much interest in recent years. Specifically, the development of GRASP (golden‐angle radial sparse parallel) reconstruction (1) for dynamic-contrast-enhanced (DCE) imaging has led to improved performance in many applications (2). Recently, an improved version of GRASP, called GRASP-Pro, was developed (3) to combine low‐rank subspace modeling with sparsity constraints. GRASP-Pro aims to reconstruct compressed representations of dynamic MRI data using pre-estimated spatiotemporal basis functions based on the globally low-rank (GLR) model. Specifically, temporal bases learned from the undersampled radial DCE data are used to generate a subspace to enforce an explicit low‐rank constraint, which later is used for the reconstruction of the full-resolution image series. While GRASP-Pro provides significant improvement in image quality over conventional GRASP, its ability to provide adequate temporal information to represent the full‐resolution image‐series remains limited. Moreover, while the GLR model has been demonstrated to be effective at representing global contrast changes (4), it is expected to be less effective for spatially localized signal dynamics. In this work, we propose an improved reconstruction framework, which extends GRASP-Pro using a locally low-rank (LLR) model to represent spatially localized dynamics based on clusters or patches. This approach has been tested in multiple DCE applications including both cancer and healthy subjects. In addition, we propose an anatomical cluster-based reconstruction approach for brain DCE-MRI.THEORY
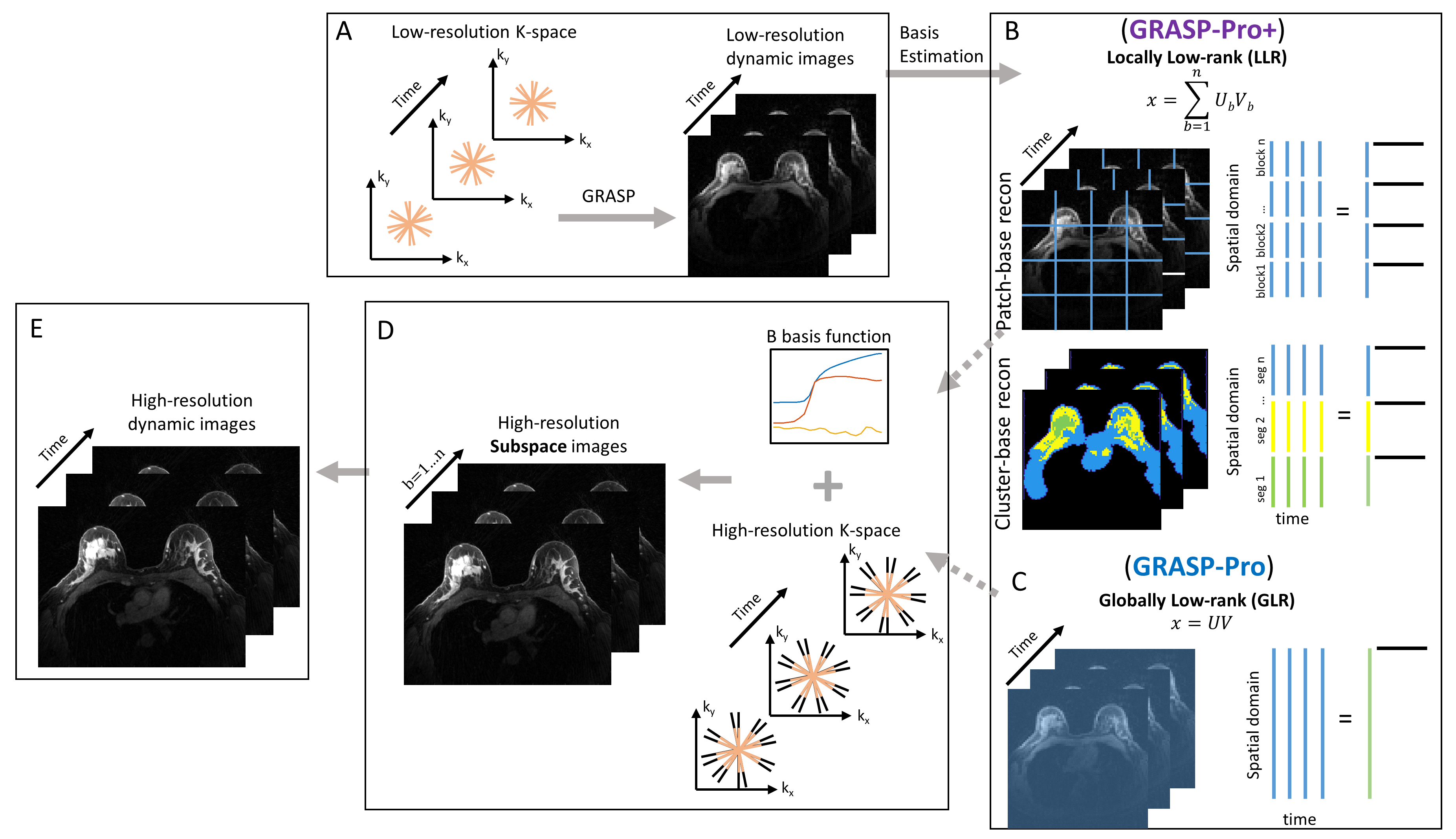
GRASP-Pro+ can be described in four steps: 1) reconstruct low resolution dynamic image series (Fig. 1A); 2) generate LLR basis functions from the low‐resolution dynamic image‐series (Fig. 1B); 3) reconstruct high‐resolution subspace images using the multiple sets of basis functions (Fig. 1D); 4) reconstruct a full-resolution time-series image by multiplying the set of coefficients by the subspace image series (Fig. 1D). For comparison, figure 1 also shows the GLR approach used in GRASP-Pro (Fig. 1C). The low‐resolution dynamic image-series GRASP reconstruction ($$$M_L$$$) is performed by solving the following optimization problem:$$\underset{\rm M_L}{\rm argmin}\frac{1}{2}\parallel y_{L}-EM_{L}\parallel_2^2+\lambda\parallel T \parallel_1$$
where $$$y_L$$$ is the sorted low‐resolution dynamic k‐space data shifted to a Cartesian grid using GROG (5) which includes the corresponding weighting ($$$w_L$$$) function for compensating varying sampling density. $$$E=\sqrt{w_L}FC_L$$$ is the low‐resolution encoding operator incorporating low-resolution coil sensitivities ($$$C_L$$$) and Fourier transform ($$$F$$$). $$$T$$$ is the sparsifying transform selected as first‐order finite differences along the dynamic dimension with $$$\lambda$$$ regularizer.
After the low-resolution GRASP reconstruction, a locally low-rank (LLR) basis function is generated using the principal component analysis (PCA) of the voxels in a small region (patch or cluster voxels) of the low‐resolution dynamic images. Full-resolution image reconstruction is performed by solving the following optimization problem:
$$\underset{\rm V_B}{\rm argmin}\frac{1}{2}\parallel y-E\sum_{b=1}^nU_bV_b\parallel_2^2+\lambda\parallel T \parallel_1$$
where $$$U_b$$$ is the basis and $$$V_b$$$ represents the coefficients to represent the low-resolution image-series under $$$U_b$$$ .
METHODS
Data acquisition was conducted using 3T Prisma and Trio systems (Siemens Healthcare, Erlangen, Germany) for brain/neck and breast imaging, respectively. The data included GRASP acquisition of six head and neck cancer (HNC) patients, three breast cancer patients and three healthy brain volunteers. For the neck and breast datasets, each time frame represented 5 sec and, for the healthy brain dataset, each time frame represented 9 sec. The number of dominant principal components for GRASP-Pro, and GRASP-Pro+ was fixed to six. In GRASP-Pro+, basis functions were estimated using one of the three methods: 1) patch-based reconstruction using four square patches for brain and ten patches for breast, covering the full image, 2) cluster-based reconstruction using three clusters generated by K-means method based on voxel-wise temporal patterns, and 3) anatomy-based reconstruction (only for brain data) using gray-matter, white-matter and cerebral-spinal-fluid anatomical masks. HNC scanning parameters included: 128 slices, 1200 radial views and 1.0×1.0×2.0mm resolution. Breast scanning parameters included: 192 slices, 288 radial views and 1.0×1.0×1.1mm resolution. Brain scanning parameters included: 40 slices, 3497 radial views and 1.0×1.0×2.0mm resolution.RESULTS
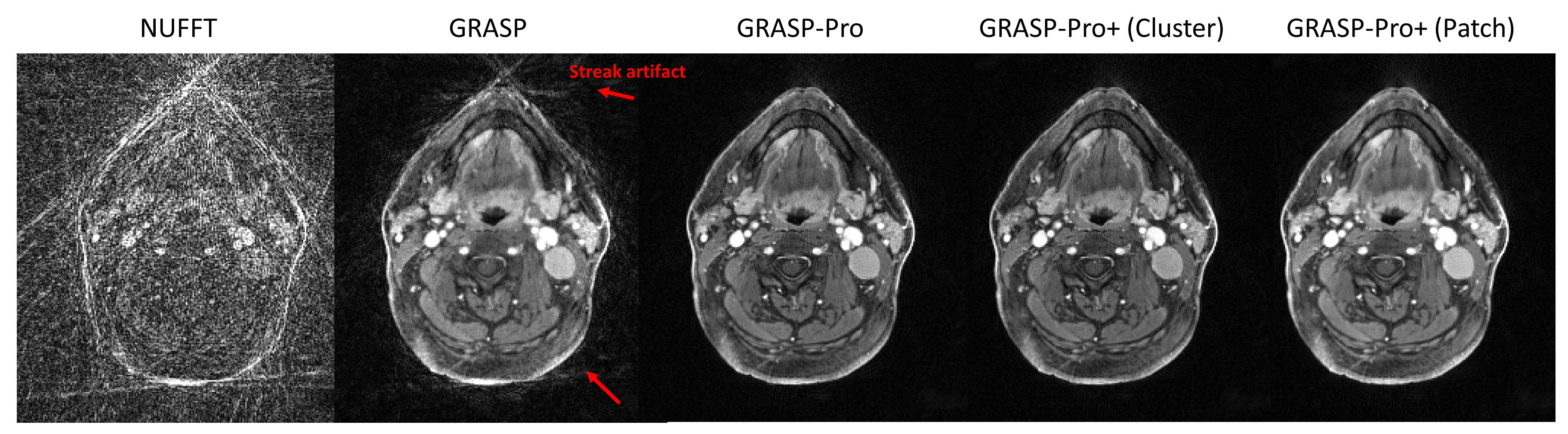
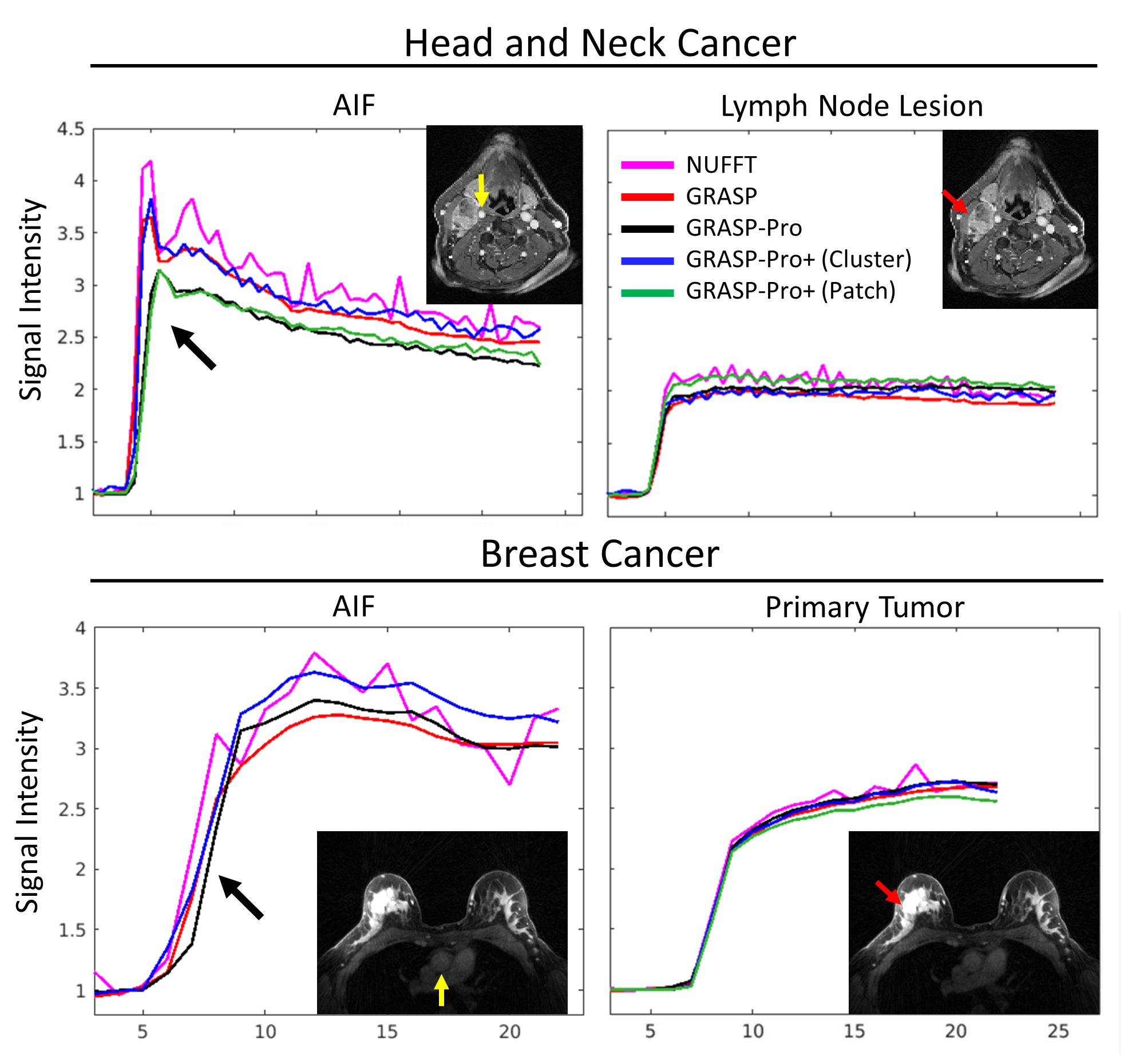
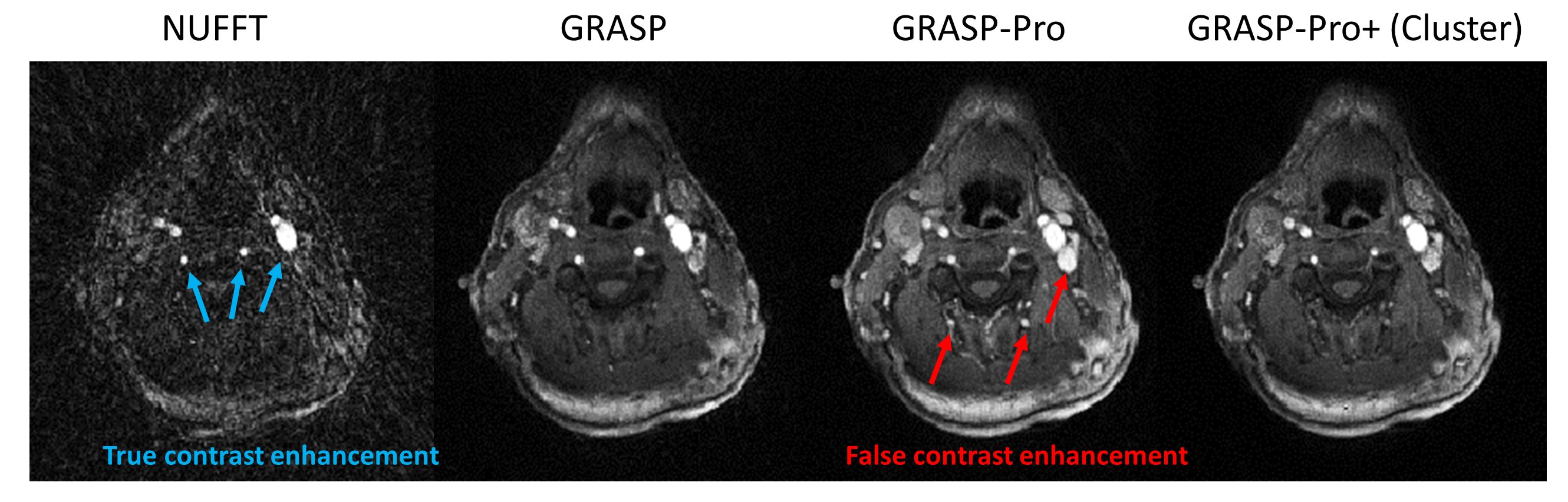
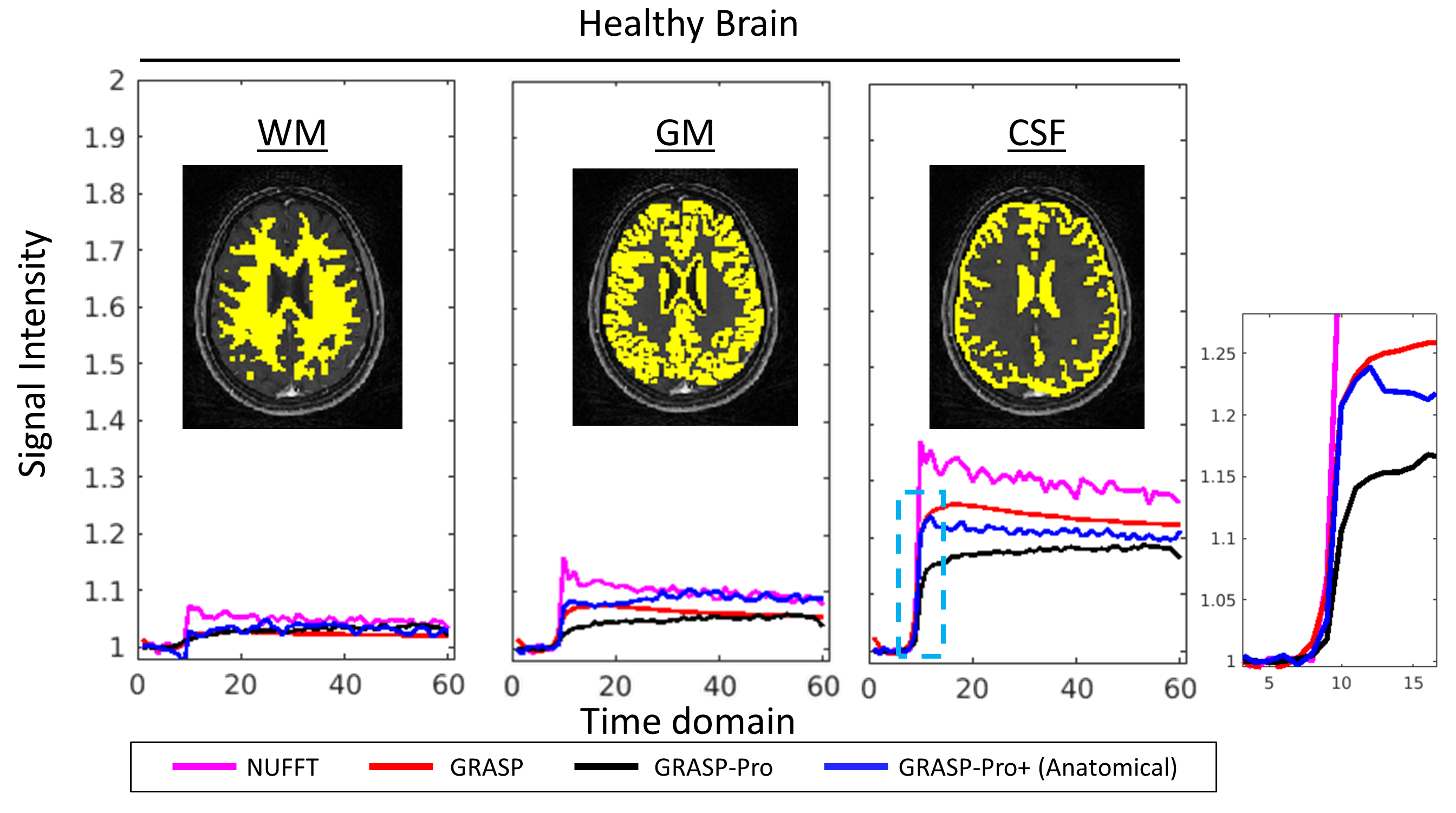
For the HNC scans (Fig. 2), images reconstructed by NUFFT and GRASP showed expected strong residual streaking artifacts while GRASP-Pro and GRASP-Pro+ showed better delineation of edges with negligible streaking artifacts. In Figure 3, enhancement ratio-time curves are shown for arteries and lesions in a HNC patient and a breast cancer patient. These examples show that GRASP-Pro+ with cluster-based approach provides more accurate dynamic curves for the fast enhancing vascular signals without the latency observed with GRASP-Pro (black arrow). This more accurate early enhancement pattern is further exemplified in Figure 4 where GRASP-Pro+ shows accurate contrast enhancement in good accordance with NUFFT and GRASP, while GRASP-Pro shows false enhancement at this time point. Figure 5 shows that GRASP-Pro+ of the brain provides reliable dynamic signal enhancement pattern in accordance with NUFFT and GRASP (see figure inset).DISCUSSION AND CONCLUSION
Many recent works have incorporated low-rank regularization with dynamic MRI studies (6-8). Here, we improve GRASP-Pro by introducing an LLR model integrated with the conjugate gradient steps into the compressed-sensing reconstruction. This approach enables to utilize spatially localized dynamic patterns by using patch-based reconstruction, cluster-based reconstruction or anatomically based information. Our preliminary results suggest that GRASP-Pro+ offers not only superior image quality but also more reliable DCE temporal information.Acknowledgements
NIH R01CA160620, R01CA219964, and UH3CA228699References
1. Feng L, Axel L, Chandarana H, Block KT, Sodickson DK, Otazo R. XD-GRASP: Golden-angle radial MRI with reconstruction of extra motion-state dimensions using compressed sensing. Magn Reson Med. 2016 Feb;75(2):775-88.
2. Kim SG, Feng L, Grimm R, et al. Influence of temporal regularization and radial undersampling factor on compressed sensing reconstruction in dynamic contrast enhanced MRI of the breast. J Magn Reson Imaging. 2016;43:261-269. Feng L, Wen Q, Huang C, Tong A, Liu F, Chandarana H.
3. GRASP-Pro: imProving GRASP DCE-MRI through self-calibrating subspace-modeling and contrast phase automation. Magn Reson Med 2020 Jan;83(1):94-108.
4. Zhao B, Haldar JP, Christodoulou AG, Liang ZP. Image reconstruction from highly undersampled (k, t)‐space data with joint partial separability and sparsity constraints. IEEE Trans Med Imaging. 2012;31:1809–1820.
5. Seiberlich N, Breuer F, Blaimer M, Jakob P, Griswold M. Self-calibrating GRAPPA operator gridding for radial and spiral trajectories. Magn Reson Med. 2008;59:930–935
6. Tamir JI, Uecker M, Chen W, et al. T2 shuffling: sharp, multicontrast, volumetric fast spin‐echo imaging. Magn Reson Med. 2017;77:180–195.
7. Pedersen H, Kozerke S, Ringgaard S, Nehrke K, Kim WY. k‐t PCA: temporally constrained k‐t BLAST reconstruction using principal component analysis. Magn Reson Med. 2009;62:706–716.
8. Christodoulou AG, Zhang HS, Zhao B, Hitchens TK, Ho C, Liang ZP. High‐resolution cardiovascular MRI by integrating parallel imaging with low‐rank and sparse modeling. IEEE Trans Biomed Eng. 2013;60:3083–3092.
Figures