0861
Comparison of two retrospective tracking techniques in presence of fast and slow motion.
Elisa Marchetto1,2, Kevin Murphy2,3, and Daniel Gallichan1,2
1School of Engineering, Cardiff University, Cardiff, United Kingdom, 2Cardiff University Brain Research Centre (CUBRIC), Cardiff University, Cardiff, United Kingdom, 3School of Physics and Astronomy, Cardiff University, Cardiff, United Kingdom
1School of Engineering, Cardiff University, Cardiff, United Kingdom, 2Cardiff University Brain Research Centre (CUBRIC), Cardiff University, Cardiff, United Kingdom, 3School of Physics and Astronomy, Cardiff University, Cardiff, United Kingdom
Synopsis
We investigated the artifacts arising from different types of head motion during brain structural MR imaging and how well these artifacts can be compensated for using retrospective correction based on two different motion-tracking techniques: FatNavs and Tracoline systems. High image quality could be recovered in our slow-motion scenarios using both motion estimation techniques. Masking the non-rigid part of the neck during FatNav volumes registration led to higher image quality when large pitch-motion was present. The fast continuous motion scenario led to more severe image artifacts that could not be fully compensated by the retrospective motion correction techniques used.
Introduction
In this study, we compared FatNav1-based and Tracoline (TCL)2-based retrospective motion-correction techniques: the first uses the natural sparsity of fat images to apply the GRAPPA3 parallel imaging technique at exceptionally high acceleration factors, enabling the detection and correction of motion for high resolution imaging in compliant subjects. TCL is a 3D tracking system that uses a camera pointed at the face to enable motion-correction of PET and MRI brain images, without using markers, at high frequency rate. Our aim is to understand which motion leads to the worst artifacts and how well image quality can be restored with different motion-tracking estimates. Moreover, we wanted to understand how to achieve the best image quality in different motion scenarios, which is clinically relevant to reduce the need for rescans4.Methods
MPRAGE images were acquired from a group of 9 healthy subjects on a Prisma scanner (Siemens Healthcare, Erlangen, Germany) using a 64 channel RF Coil array for signal reception. Autocalibration lines (ACS) were acquired once at the beginning of the scan for the FatNavs GRAPPA reconstruction. TCL data were calibrated at the end of the acquisition via TracSuite software (v3). Subjects moved their head to generate continuous motion (4 or 6 cycles/min)5, small/large stepwise motion and ‘simulated realistic’ motion, based on given instructions. ‘Simulated realistic’ motion patterns were generated, based on an existing motion trace in a non-compliant subject during an fMRI experiment acquired without deliberate motion. From these, we derived: pitch-wise motion and slow continuous motion along the diagonals. One MPRAGE scan without deliberate motion was always acquired as reference. The image reconstruction was performed using retroMoCoBox ToolBox6, which uses SPM (Statistical Parametric Mapping)7 to perform 6-dof rigid-body alignment between FatNav volumes to generate motion estimates. If substantial signal is detected in the non-rigid neck region when FatNavs are acquired, this can affect the quality of the motion estimates, which is particularly noticeable using the Siemens 64-channel coil. We therefore tested whether masking the non-rigid part of the head would improve the motion parameter estimation and image quality in all our motion scenarios, expecting it to be particularly beneficial in the case of strong pitch-motion. The image quality after the motion-correction was assessed visually and using three different mathematical metrics for comparison: the Feature Similarity Index (FSIM)8, pixel intensity-based Gradient Entropy (GE)9 and the Normalized Gradient Squared (NGS)10. GE and NGS decrease and increase respectively as the image quality improves, while FSIM requires a reference image for comparison and its value varies between 0-1, with 1 obtained when the two images compared are identical.Results
In our data, NGS and GE showed an unclear behaviour in almost all experiments, not matching what visually seems like a good improvement from the uncorrected to the corrected image. Despite the visible improvements show in Figure 1A, NGS values of the corrected images are lower than the uncorrected one. Similarly, the uncorrected image GE value is lower than motion-corrected ones. For this reason, we based our evaluations on FSIM metric values, which better matches our visual assessment. Slow up-right diagonal motion as well as nodding motion could be well-corrected by FatNavs and TCL as shown in Figure 1 and 2 respectively. Both FatNavs and TCL improved the image quality in all our stepwise motion scenarios. FatNav motion-correction was further improved by using the neck-mask in 8/12 experiments. One example of our discrete motion scenario is reported in Figure 3. Based on the FSIM score, 3D-FatNavs outperforms TCL correction in all experiments of continuous motion, although motion artifacts are still visible as shown in Figure 4.Discussion
GE and NGS exhibited an unclear behaviour in almost all the experiments performed for this study: this might be due to their sensitivity to different artifacts. Both TCL and FatNavs can achieve good image quality in case of slow changes in the head position, although motion artifacts were still visible in case of large stepwise motion. However, they struggled to restore good image quality in the continuous motion case: despite the higher sampling rate (0.4 Hz vs 30 Hz), the FSIM-based image quality metric even decreased after TCL motion-correction in some cases. This might be caused by extensive violations of the Nyquist criterion due to the head rotations involved, which could not be compensated for by the single-step NUFFT-based11 retrospective reconstruction: iterative methods for applying the motion-correction may help to reduce some of these residual artifacts. In Figure 5 is shown how the neck-mask is applied during the registration process of the FatNav volumes: this process was shown to be particularly beneficial in case of strong pitch rotations.Conclusion
In conclusion, both methods can achieve good image quality in case of slow changes in the head position. Image quality cannot be fully recovered in this retrospective implementation when strong violations of the Nyquist criterion are present. Further improvements were possible masking the non-rigid part of the neck during the FatNav volumes registration, especially in case of strong pitch-wise rotations.Acknowledgements
This work is partly funded by research support from TracInnovations (Ballerup, Denmark).References
- Gallichan D, Marques J, Gruetter R, Retrospective correction of involuntary microscopic head movement using highly accelerated fat image navigators (3D FatNavs) at 7T. Magnetic Resonance in Medicine 2016; 75(3): 1030-1039.
- Slipsager J, Ellegaard A, Glimberg S, et al. Markerless motion tracking and correction for PET, MRI, and simultaneous PET/MRI. PLoS ONE 2019; 14(4):e0215524.
- Griswold A, Jakob P, Heidemann R, et al. Generalized Autocalibrating Partially Parallel Acquisitions (GRAPPA). Magnetic Resonance in Medicine 2002; 47:1202–1210.
- Slipsager J, Glimberg S, Søgaard J, et al. Quantifying the Financial Savings of Motion Correction in Brain MRI: A Model‐Based Estimate of the Costs Arising From Patient Head Motion and Potential Savings From Implementation of Motion Correction, J Magn Reson Imaging 2020; 52:731–738.
- Frost R, Wighton P, Karahanoğlu F, et al. Markerless high‐frequency prospective motion correction for neuroanatomical MRI. Magnetic Resonance in Medicine 2019;82:126–144.
- RetroMoCoBox Toolbox. https://github.com/dgallichan/retroMoCoBox.
- SPM-Statistical Parametric Mapping https://www.fil.ion.ucl.ac.uk/spm/doc/manual.pdf.
- Wang Z, Bovik A, Sheikh H, et al. Image Quality Assessment: From Error Visibility to Structural Similarity. IEEE Transactions on Image Processing. 2004;13(4):600-12.
- McGee KP. Image Metric-Based Correction (Autocorrection) of Motion Effects: Analysis of Image Metrics. Journal of Magnetic Resonance Imaging. 2000;11:174 –81.
- Loktyushin A, Nickisch H, Pohmann R, et al. Blind retrospective motion correction of MR images: Blind Retrospective Motion Correction. Magnetic Resonance in Medicine 2013; 70(6):1608-18.
- Fessler JA, Sutton BP. Nonuniform fast fourier transforms using min-max interpolation. IEEE Transactions on Signal Processing. 2003;51(2):560-74.
Figures
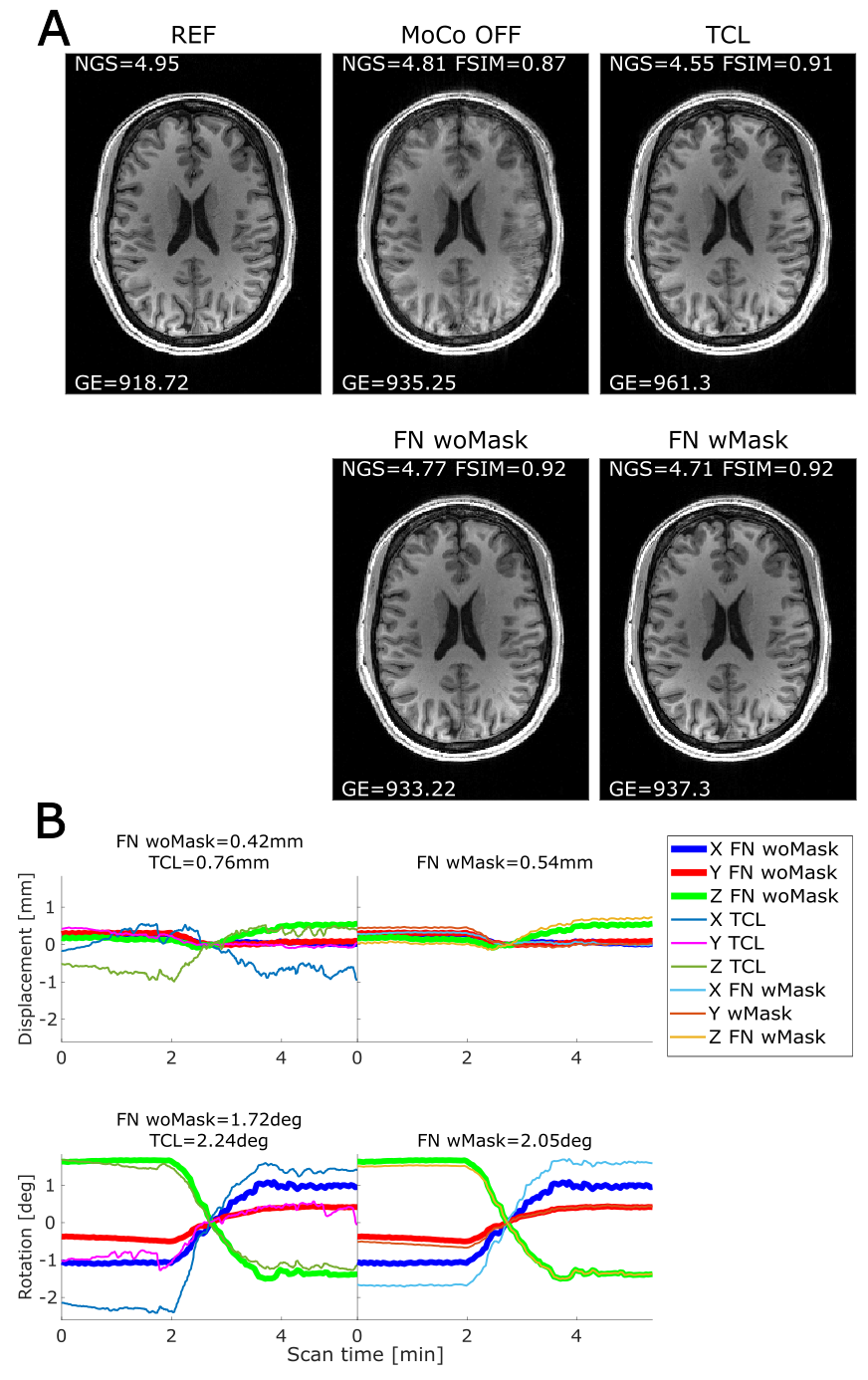
Figure 1. (A) Comparison between reference (Still-MoCo
OFF), uncorrected (MoCo OFF) and the four corrected images (using FatNav woMask,
TCL and FatNav wMask respectively) for slow up-right diagonal motion: the NGS,
FSIM and GE values are reported on each image. (B) Motion parameters for
FatNavs woMask (thick lines) and TCL (thin lines) are shown on the same plot
with related RMS values for translations and rotations; the FatNav woMask and
FatNav wMask are separately plotted on the side of the FatNav/TCL plot, to
compare the motion parameters with and without masking.
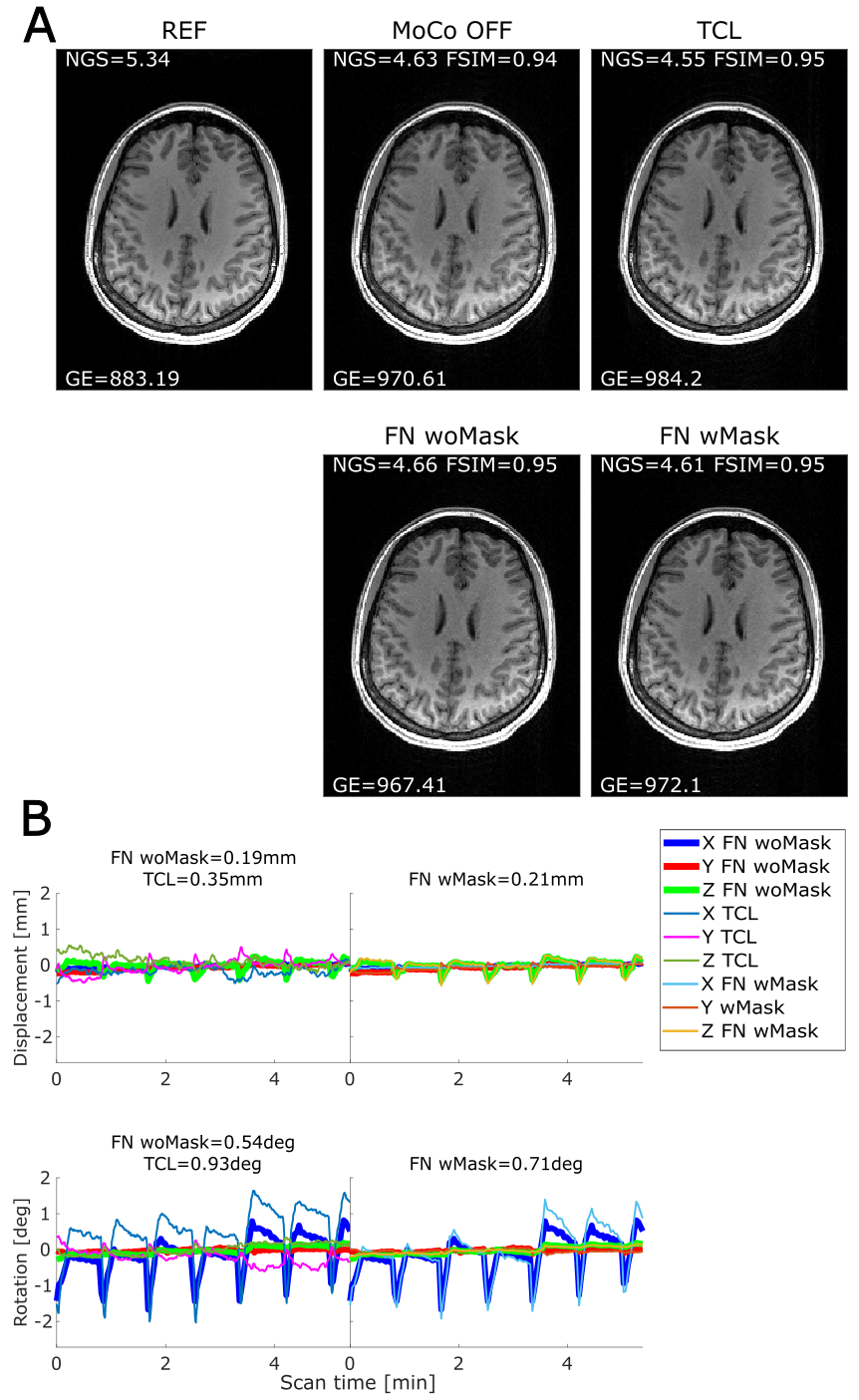
Figure 2. (A) Our nodding motion scenario still did not
produce a lot of motion artifacts; however, both TCL and FatNavs slightly
improved the image resolution. Motion parameters are reported in section (B).
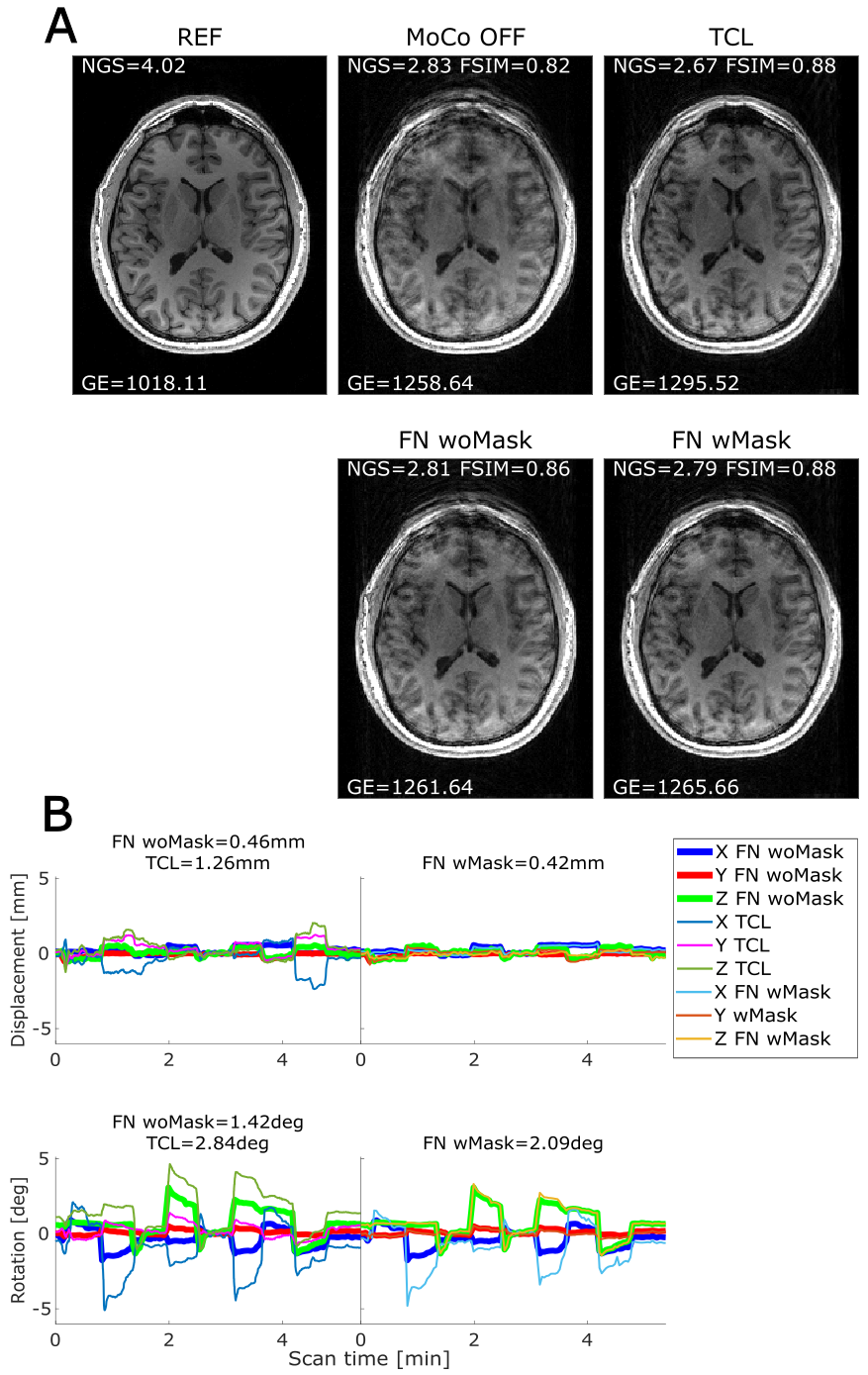
Figure 3. (A) Comparison of MPRAGE volumes in case of
large stepwise motion: FatNav woMask correction was improved applying the mask
during the registration process. TCL seems sharper than FatNavs in the upper
part of the image, although ringing artifacts are still visible in the bottom
part. The magnitude of the pitch rotation is higher when the mask is used
compared to the original FatNavs estimation (B): the quality of the motion
estimates was probably affected by the strong signal collected from the non-rigid
neck region during FatNavs acquisition.
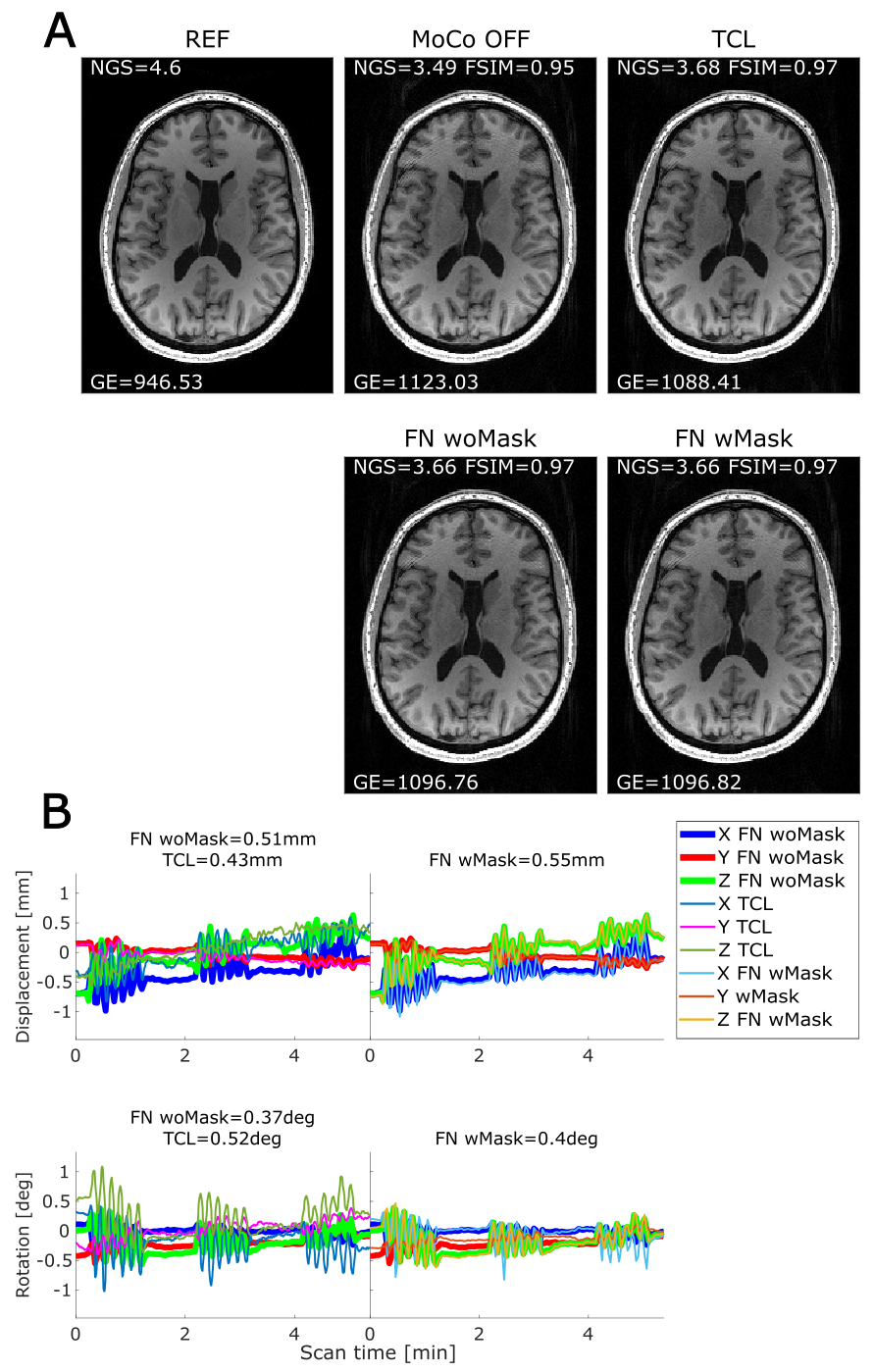
Figure 4. (A) Comparison of MPRAGE volumes obtained during
a 6 cycles/min continuous motion experiment: the correction obtained from the
TCL does not improve the image quality compared to the uncorrected image.
FatNavs correction improved the image sharpness compared to all the other
cases. (B) Motion parameters measured by FatNav woMask (thick lines) and TCL
(thin line); the left graphs compared FatNavs motion estimates with and without
mask.
Figure 5. Sequence of FatNav volumes acquired while the
subject was performing continuous motion. The created mask is represented in
light grey: the neck area is excluded so that only the rigid part of the head
is considered during the SPM registration process. The mask is co-registered to
the first FatNav volume to be aligned with the subject head.
DOI: https://doi.org/10.58530/2022/0861