0244
Off-Resonance Self-Correction by Implicit Temporal Encoding: Performance at 7T1Institut for Biomedical Engineering, ETH Zurich and University of Zurich, Zurich, Switzerland
Synopsis
B0-induced distortions are a main caveat for trajectories with long readout durations, particularly at high field. Recently, B0 self-correction based on implicit temporal encoding by the coil array has been proposed and shown to be feasible at 3T. This work focuses on application of the approach at 7T. Performance analysis show that due to the increased strength of B0 inhomogeneities constant density bases to model B0 might not be sufficient. A variable density basis adapting to the gradient is proposed yielding spatially-dependent regularization. By means of this, reconstruction results can be improved demonstrating the feasibility of B0 self-correction at 7T.
Introduction
Imaging at higher field strengths benefits from increased SNR and is hence frequently used in fMRI1-3. However, artefacts due to B0 inhomogeneities are also more pronounced. If B0 correction is performed, commonly a field map is acquired, requiring additional scan time, processing of the maps, and the maps are prone to dynamic effects like patient motion. Hence, estimation of B0 maps is an intriguing challenge4,5. Most of the proposed methods rely on dual acquisitions like EPI-up/down4,6 and none is universally applicable. As an alternative, B0 self-correction based on implicit temporal encoding by array detection has been shown feasible at 3T7.In this abstract, we explore the performance of this approach at 7T, show limitations of straight application as used for 3T and present improvements by constituting an adaptive basis.Methods
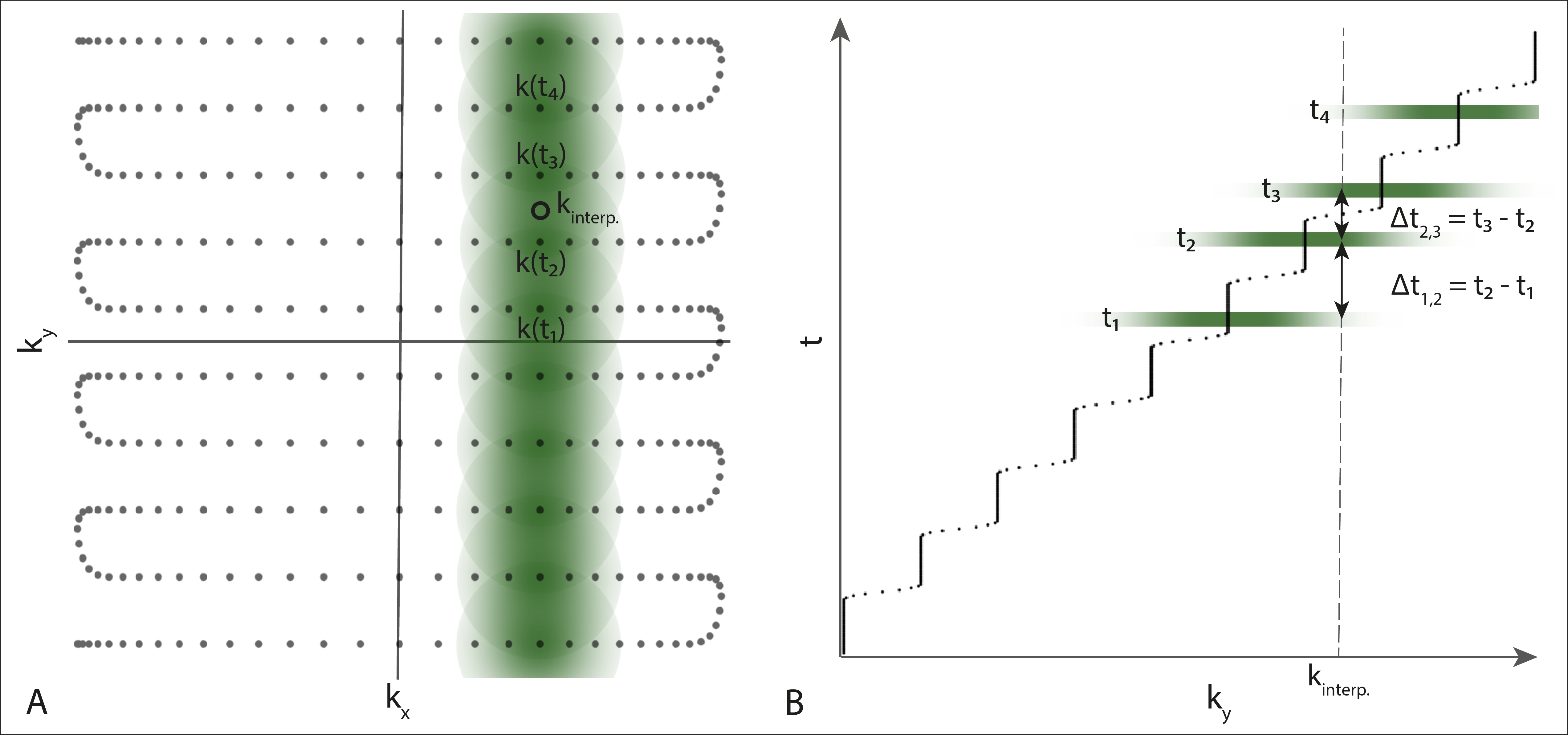
Joint Estimation of B0 and the ObjectGiven a discretized signal equation$$\mathbf{m}=E(\mathbf{\Delta\omega_0})\mathbf{v}\;\;\;(1)$$with the measured signal$$$\;\mathbf{m}$$$, the encoding operator$$$\;E\;$$$incorporating field inhomogeneity$$$\;\mathbf{\Delta\omega_0}\;$$$and the object$$$\;\mathbf{v}$$$, joint reconstruction of$$$\;\mathbf{\Delta\omega_0}\;$$$and$$$\;\mathbf{v}\;$$$can be deployed as minimization:$$\mathcal{L}(\mathbf{\Delta\omega_0},\mathbf{v})=\Vert\,\mathbf{m}-E(\mathbf{\Delta\omega_0})\mathbf{v}\,\Vert^2.\;\;\;(2)$$B0 information can be encoded implicitly by overlapping coil footprints of samples acquired at different times7, see Fig. 1.
Every minimum of the loss (2) is particularly optimal in$$$\;\mathbf{v}$$$, which is obtained by image reconstruction for given$$$\;\mathbf{\Delta\omega_0}$$$
$$\mathbf{v}=E^+(\mathbf{\Delta\omega_0})\mathbf{m}\;\;\;(3)$$Inserting (3) into (1) yields a loss solely depending on$$$\;\mathbf{\Delta\omega_0}$$$
$$\mathcal{L}(\mathbf{\Delta\omega_0)})=\Vert\,(Id-E(\mathbf{\Delta\omega_0})E^+(\mathbf{\Delta\omega_0}))\mathbf{m}\,\Vert^2\;\;\;(4)$$with the derivative with respect to$$$\;\mathbf{\Delta\omega_0}$$$
$$\nabla_{\Delta\omega_0}\mathcal{L}(\mathbf{\Delta\omega_0})=2\Re\{-i\text{diag}((E^+\mathbf{m})^H)E^H\text{diag}(t)(\mathbf{m}-EE^+\mathbf{m})\}.\;\;\;(5)$$To minimize (4), the algorithm is initialized with a zero field map and a gradient descent method is performed until convergence amounting to a non-convex step length determination7. As the algorithm yields B0-corrected images without using any knowledge on B0 it is called “B0 self-correction”.
Regularization
The field map is modelled in a smooth basis with 2nd order B-splines$$$\;\mathbf{\beta}\;$$$centered at positions$$$\;\mathbf{r}_j\;$$$
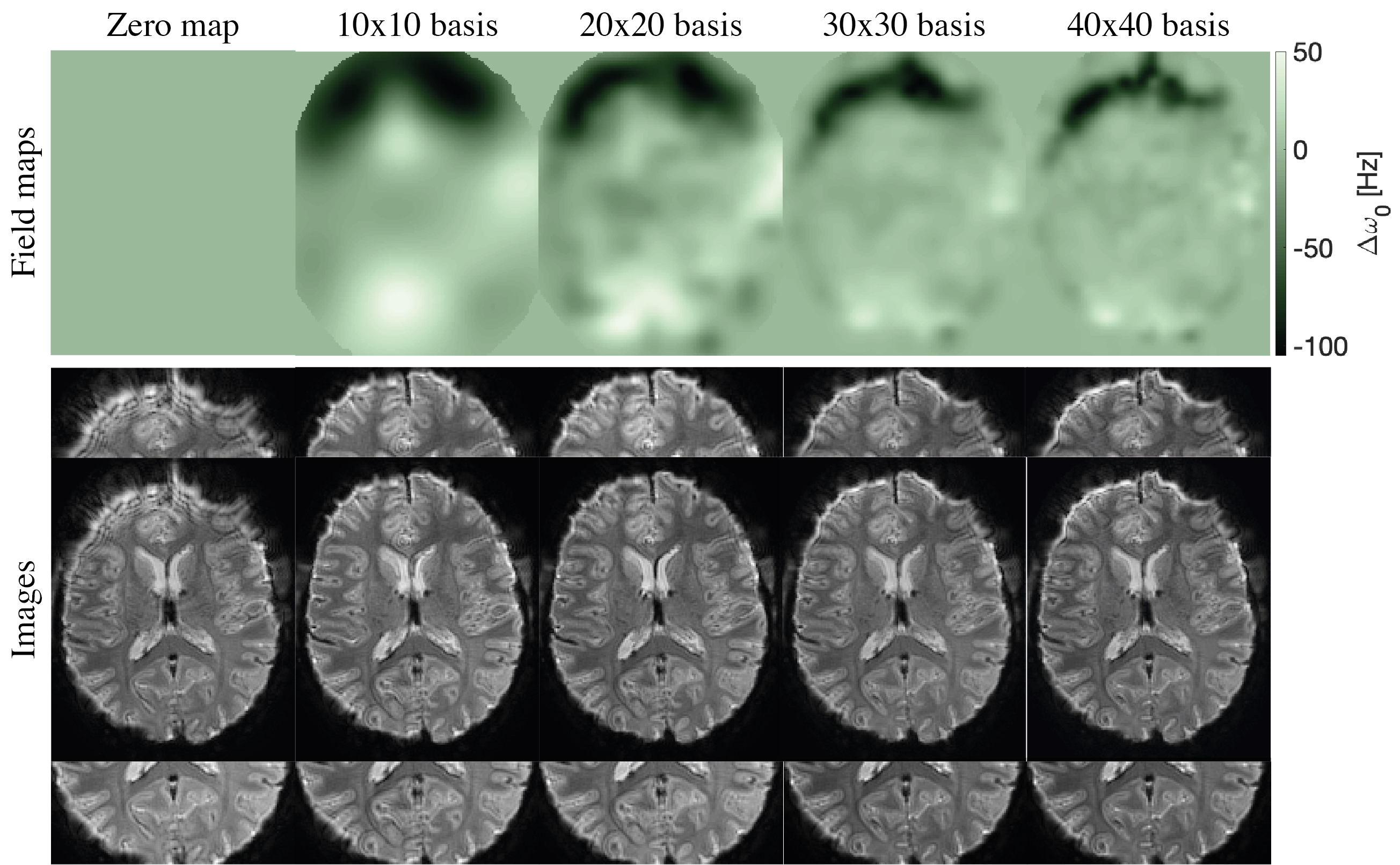
$$\mathbf{\Delta\omega_0}\approx\sum_jb_j\mathbf{\beta}_j.\;\;\;(6)$$reducing the number of parameters of the optimization. B0 self-correction is performed modelling B0 on equidistant grids of$$$\;10\times10$$$,$$$\;20\times20$$$,$$$\;30\times30$$$,$$$\;40\times40\;$$$grid points. Smaller numbers of basis functions lead to fewer parameters and result in stronger regularization, whereas higher numbers of basis functions allow depiction of finer details.
The linearity of the basis is beneficial as the gradient of the loss with respect to a basis coefficient is given by the dot product$$(\nabla_b\mathcal{L}(\mathbf{b}))_j=\mathbf{\beta}_j\cdot\nabla_{\Delta\omega_0}\mathcal{L}(\mathbf{\Delta\omega_0}).\;\;\;(7)$$
Basins of Attraction
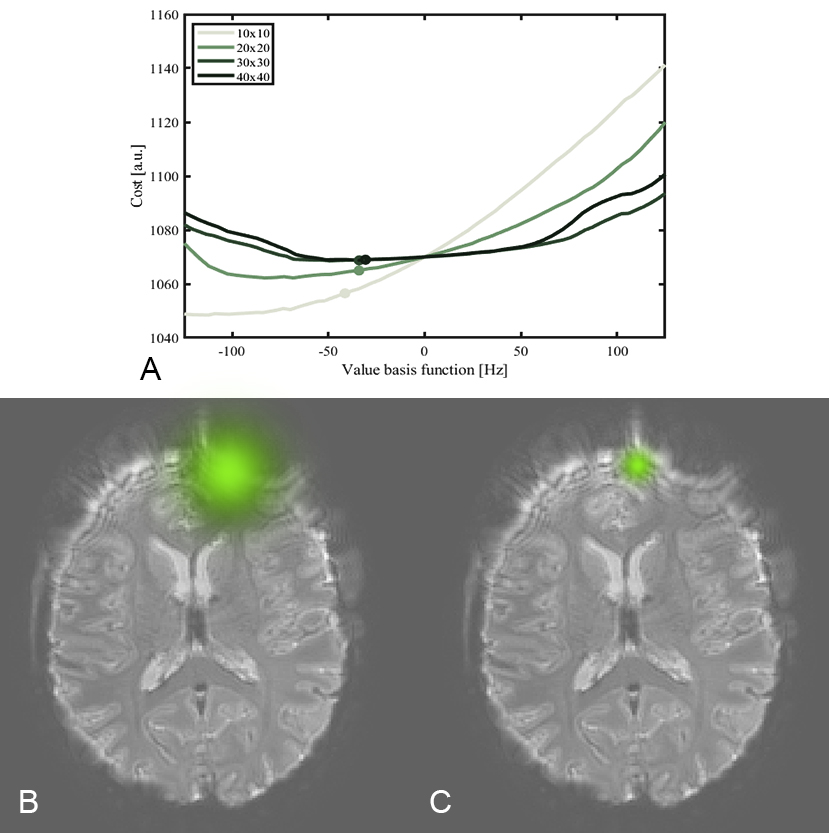
For non-convex optimization problems, the size of the basin of attraction of desired solutions is crucial to allow for uncertainty in the initialization. To investigate the influence of the number of basis functions on the loss, it is depicted for variation of one basis coefficient.
Adaptive Basis
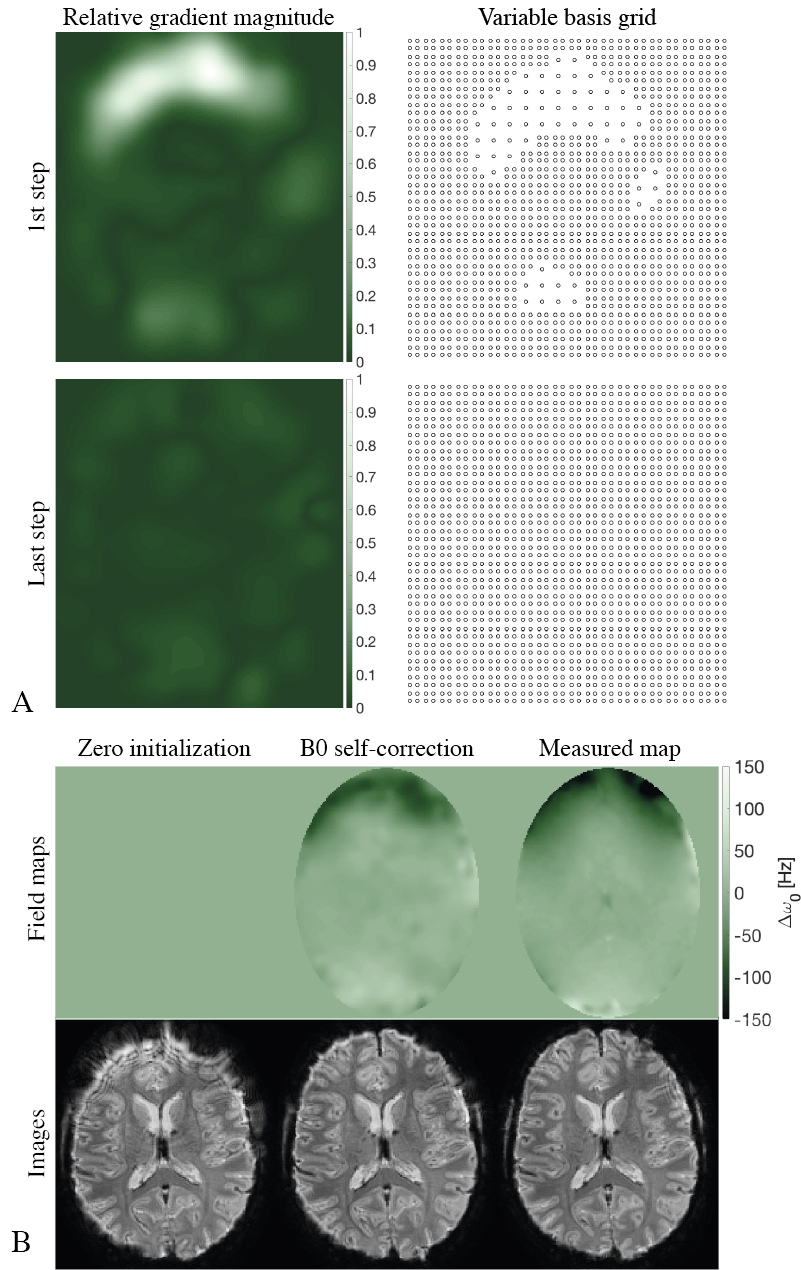
In regions of high B0 offsets, distortions will be stronger requiring a higher degree of regularization. The field map, however, is a-priori not known but the gradient$$$\;\nabla_{\Delta\omega_0}\mathcal{L}(\mathbf{\Delta\omega_0})\;$$$is, which, in each optimization step, is only multiplied with a scalar. Consequently, relative variation in each descent step is given. Assuming the B0 offset to be high in areas where the gradient is high, a variable density basis can be setup based on relative absolute gradient strengths. Variable bases used here are constituted of two equidistant bases with$$$\;20\times20\;$$$and$$$\;40\times40\;$$$grid points.
Measurements
Data was acquired on a 7T MR system (Philips Healthcare, Best, The Netherlands) using a$$$\;32$$$-channel head coil (Nova Medical, Wilmington, MA) equipped with$$$\;16\;$$$fluorine NMR field probes8 integrated in the set-up. Spiral-out imaging with$$$\;1.8\times1.8$$$,$$$\;1.3\times1.3$$$,$$$\;1.1\times1.1$$$,$$$\;1.0\times1.0\text{mm}^2\;$$$resolution for$$$\;\text{R}=1-4$$$,$$$\;\text{TE}=15\text{ms}$$$,$$$\;\text{FOV}=22\times22\text{cm}^2\;$$$was performed. Additionally, a two-echo GRE sequence was acquired to fit B0 and B1 maps.
Results
Number of Basis FunctionsPerforming B0 self-correction with constant density bases leads to improved depiction quality and reasonable field map estimates, see Fig. 2. Remarkably, the correction worked better in the frontal part when choosing a coarser basis as there B0 offsets are higher. However, the level of depiction is higher in the rear part for a finer basis. A trade-off for the basis resolution can be found between$$$\;20\times20\;$$$and$$$\;30\times30\;$$$coefficients.
Size of Basins of Attraction
For larger basis kernels, i.e. stronger regularization, the loss becomes smoother, but the minimum of the loss does not coincide with the optimal value, see Fig. 3A, presumably due to averaging B0 over a wider range. For smaller basis kernels the optimal value coincides with the minimum of the loss but the size of the basin of attraction gets smaller and other local minima show up (Fig. 3A). These effects on the loss function motivate an adaptive basis strategy.
Adaptive Basis
B0 self-correction is more challenging at higher field as the distortions are stronger. Employing a variable density basis results in B0 self-corrected images (Fig. 4B) that are superior to images using constant bases. Leveraging information of the gradient to adjust the basis along the optimization leads to stronger regularization in highly off-resonant parts in the beginning, and a constant basis resolution in the last steps of the optimization (Fig. 4A).
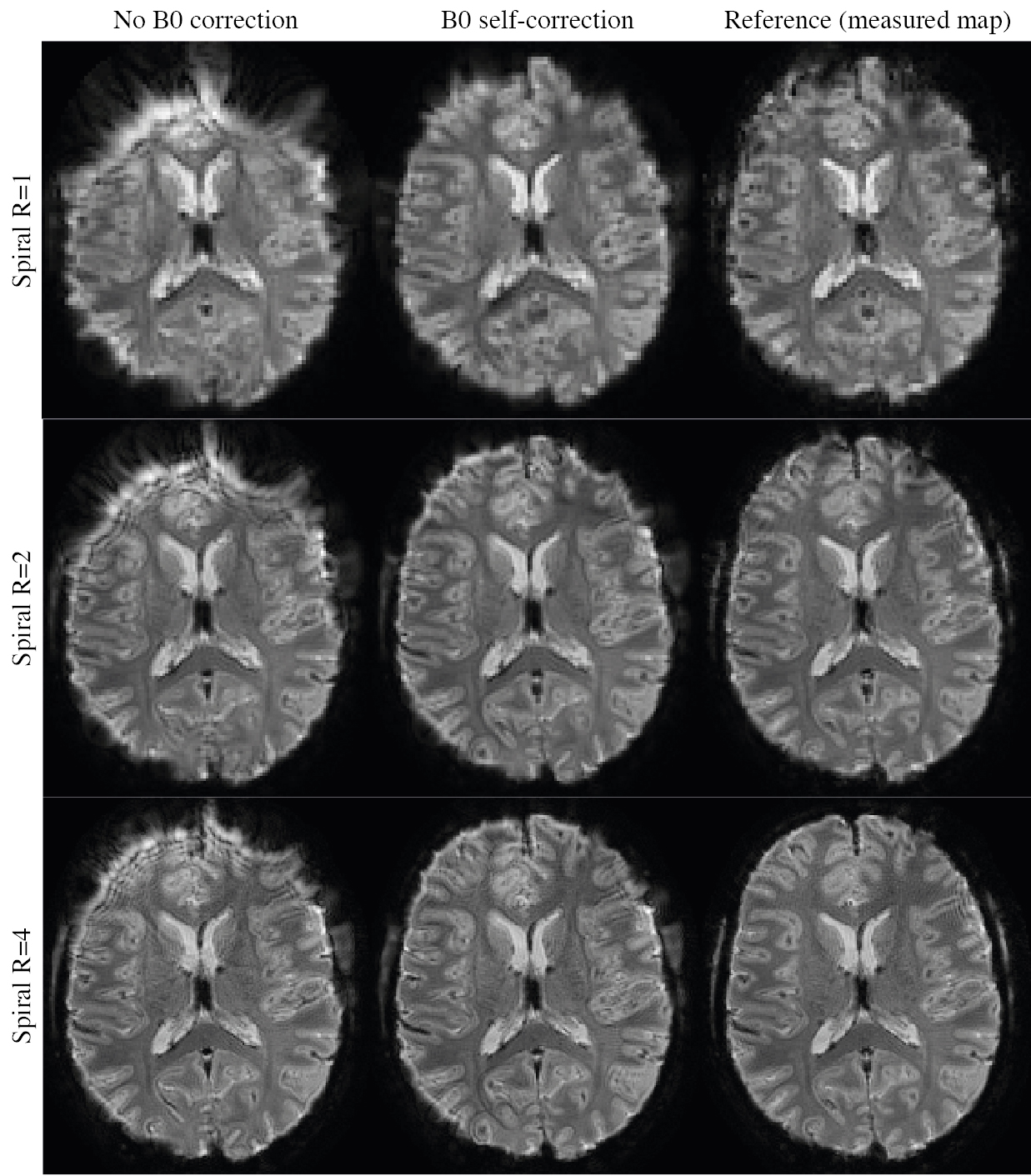
B0 self-correction with a variable density basis shows consistent performance for spiral 7T images acquired with other acceleration factors (Fig. 5).
Discussion and Conclusion
Off-resonance self-correction at 7T was shown to be feasible. At 7T B0 off-resonances are generally higher than at 3T, but the implicit encoding might benefit from the shorter wavelengths of the sensitivities. Variable density bases where shown to be effective to improve upon constant density bases. The algorithm is applicable to any trajectory but spirals were shown here as they form a particularly challenging task given the strong blurring artefacts.Acknowledgements
The authors would like to thank Maria Engel for her support in acquiring the data.References
1. Poser BA, Norris DG. Investigating the benefits of multi-echo EPI for fMRI at 7 T. NeuroImage 2009;45:1162–1172 doi: 10.1016/j.neuroimage.2009.01.007.
2. Huber L, Goense J, Kennerley AJ, et al. Cortical lamina-dependent blood volume changes in human brain at 7 T. NeuroImage 2015;107:23–33 doi: 10.1016/j.neuroimage.2014.11.046.
3. T. Vu A, Jamison K, Glasser MF, et al. Tradeoffs in pushing the spatial resolution of fMRI for the 7T Human Connectome Project. NeuroImage 2017;154:23–32 doi: 10.1016/j.neuroimage.2016.11.049.
4. Andersson JLR, Skare S, Ashburner J. How to correct susceptibility distortions in spin-echo echo-planar images: application to diffusion tensor imaging. NeuroImage 2003;20:870–888 doi: 10.1016/S1053-8119(03)00336-7.
5. Sutton BP, Noll DC, Fessler JA. Dynamic field map estimation using a spiral-in/spiral-out acquisition. Magn. Reson. Med. 2004;51:1194–1204 doi: 10.1002/mrm.20079.
6. Zahneisen B, Aksoy M, Maclaren J, Wuerslin C, Bammer R. Extended hybrid-space SENSE for EPI: Off-resonance and eddy current corrected joint interleaved blip-up/down reconstruction. NeuroImage 2017;153:97–108 doi: 10.1016/j.neuroimage.2017.03.052.
7. Patzig F, Wilm BJ, Pruessmann KP. Off-Resonance Self-Correction by Implicit B0-Encoding. Proc. 29th Annu. Meet. ISMRM Vanc. Can. 2021:666.
8. Gross S, Barmet C, Dietrich BE, Brunner DO, Schmid T, Pruessmann KP. Dynamic nuclear magnetic resonance field sensing with part-per-trillion resolution. Nat. Commun. 2016;7:13702 doi: 10.1038/ncomms13702.
Figures