0236
Real-time shimming using FID navigators1Radiology, Harvard Medical School, Boston, MA, United States, 2Computational Radiology Laboratory, Boston Children's Hospital, Boston, MA, United States, 3Advanced Clinical Imaging Technology Group, Siemens Healthcare, Lausanne, Switzerland, 4Radiology, Lausanne University Hospital and University of Lausanne, Lausanne, Switzerland, 5LTS5, École Polytechnique Fédérale de Lausanne, Lausanne, Switzerland, 6Athinoula A. Martinos Center for Biomedical Imaging, Massachusetts General Hospital, Boston, MA, United States
Synopsis
Real-time B0 shimming enables improved compensation for the effects of dynamic field perturbations in MRI compared to retrospective approaches, which are computationally intensive and cannot compensate for inherent losses of information. FID navigators can rapidly characterize spatiotemporal field changes using a forward model that predicts the effect of B0 shim changes on the measured FID signal, making them ideally suited for real-time applications. In this work, we implement real-time field control using FID navigators to compensate for spatially linear field changes and demonstrate substantially improved T2*-weighted image quality in the presence of field perturbations in three volunteers scanned at 3T.
Introduction
Dynamic changes in the magnetic field due to respiration, subject motion and system instabilities perturb spatial encoding in MRI and give rise to a variety of image artifacts.1–3 These effects are particularly pronounced for sequences with long echo times and linearly scale with magnetic field strength. Free induction decay navigators (FIDnavs) have previously been shown to measure and retrospectively correct for the effects of spatiotemporal field changes in both T2*-weighted imaging and echo planar imaging.4–6 However, retrospective correction is limited to reversible encoding alterations, and cannot compensate for inherent losses of information due to intra-voxel dephasing, inconsistent selective excitation, and disruption of steady state.7 Previous work has demonstrated the utility of real-time field control using NMR field probes7,8 and dual-echo navigators;9,10 however, these methods require either integration of specialized hardware or additional scan time to acquire spatially-resolved navigator data. To address these limitations, we present a method for real-time shimming using rapid FIDnav measurements, which can be calibrated directly on the scanner using spatial encoding from a low-resolution reference scan.Methods
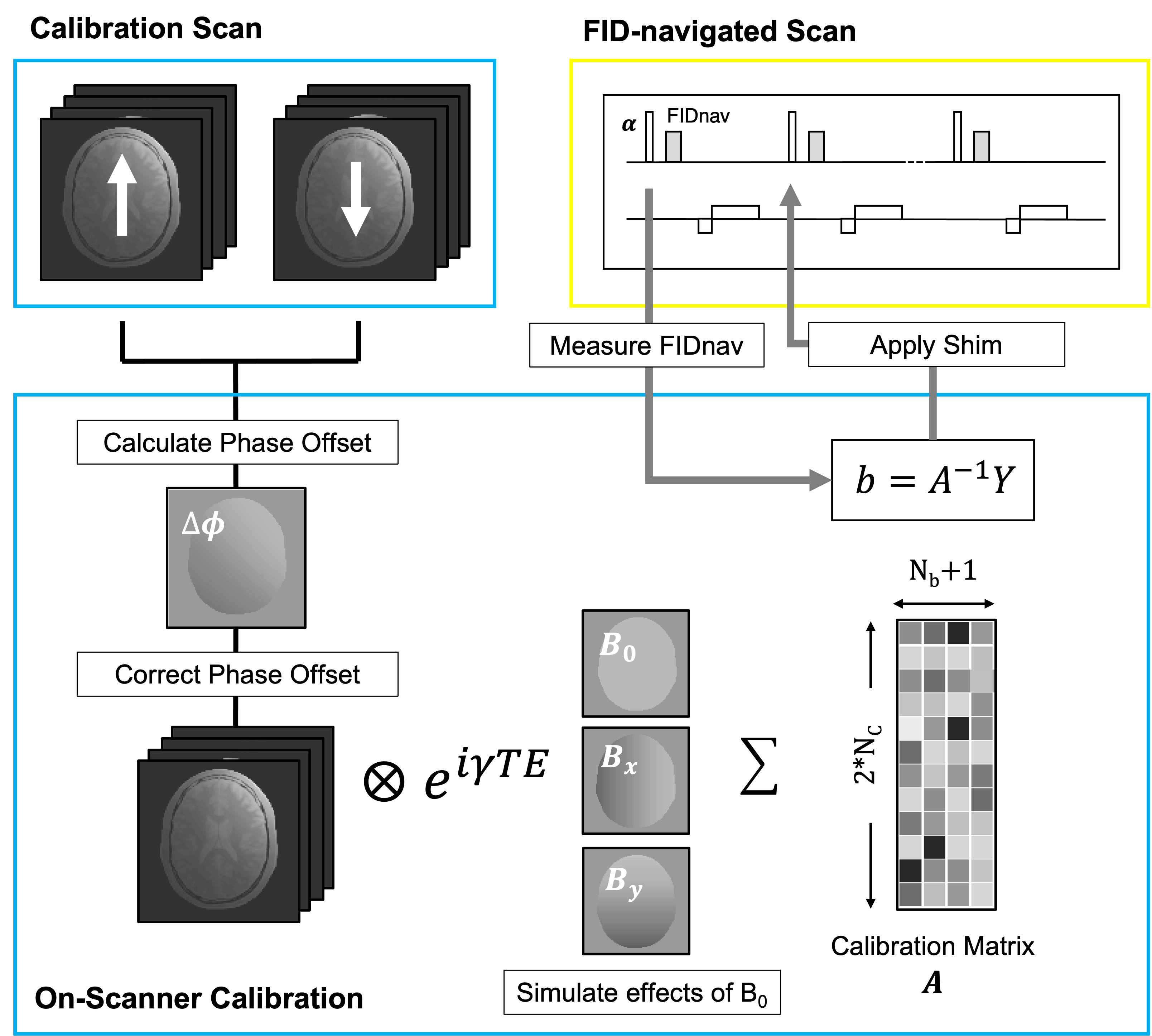
FID navigator B0 shim measurements: A linear calibration model was generated for each subject by simulating the effect of B0 field offsets on the complex-valued multi-channel FIDnav signals.5 A pair of low-resolution 2-dimensional gradient echo (GRE) scans with contrast properties matching the FIDnav embedded in the host GRE sequence were acquired with reversed gradient polarities. The multi-channel reference image was computed by combining these phase-corrected images and calibration of FIDnav shim changes was performed directly on the scanner (Fig. 1). A product GRE sequence was modified to include an FIDnav every repetition time between the slice-selective excitation pulse and imaging readout. B0 shim coefficients were estimated for each time point via least-squares fitting using the subject-specific calibration matrix computed for each slice. Integrated changes in zeroth- and first-order B0 were compensated in real time by updating the center frequency and X and Y gradient offsets, respectively.MRI experiments: Three volunteers were scanned at 3T (MAGNETOM Prisma; Siemens Healthcare, Erlangen, Germany) using a 64-channel head coil, after obtaining informed consent. Low-resolution (7-mm in-plane) reference images (TA~15 s) were acquired to create a calibration model for each subject as described above. To evaluate the accuracy of real-time B0 shim measurements using FIDnavs, volunteers were scanned using a 2D multi-echo GRE (TE1/TE2/TR = 7.38/9.84/300 ms; FA = 25°; FOV = 224x224 mm; resolution = 3.5x3.5x5 mm; 10 slices; BW = 600 Hz/px) during application of controlled gradient and frequency offsets. Maps of $$$\Delta$$$B0 relative to the reference shim setting were generated from the multi-echo GRE data with and without FID-navigated field control. To compare image quality with and without FID-navigated real-time shimming, high-resolution axial T2*-weighted GRE images (TE/TR = 35/500 ms; FA = 30°; FOV = 224x224 mm; resolution = 0.5x0.5x3 mm; 10 slices; BW = 200 Hz/px; TA~3.8 min) were acquired in each volunteer during continuous deep breathing and nose touching. A reference scan with no motion was also acquired. Images were reconstructed using the standard scanner software. Normalized root mean square error (NRMSE) and structural similarity (SSIM) were computed following rigid-body realignment of each image acquired with and without real-time field control to the reference scan.
Results
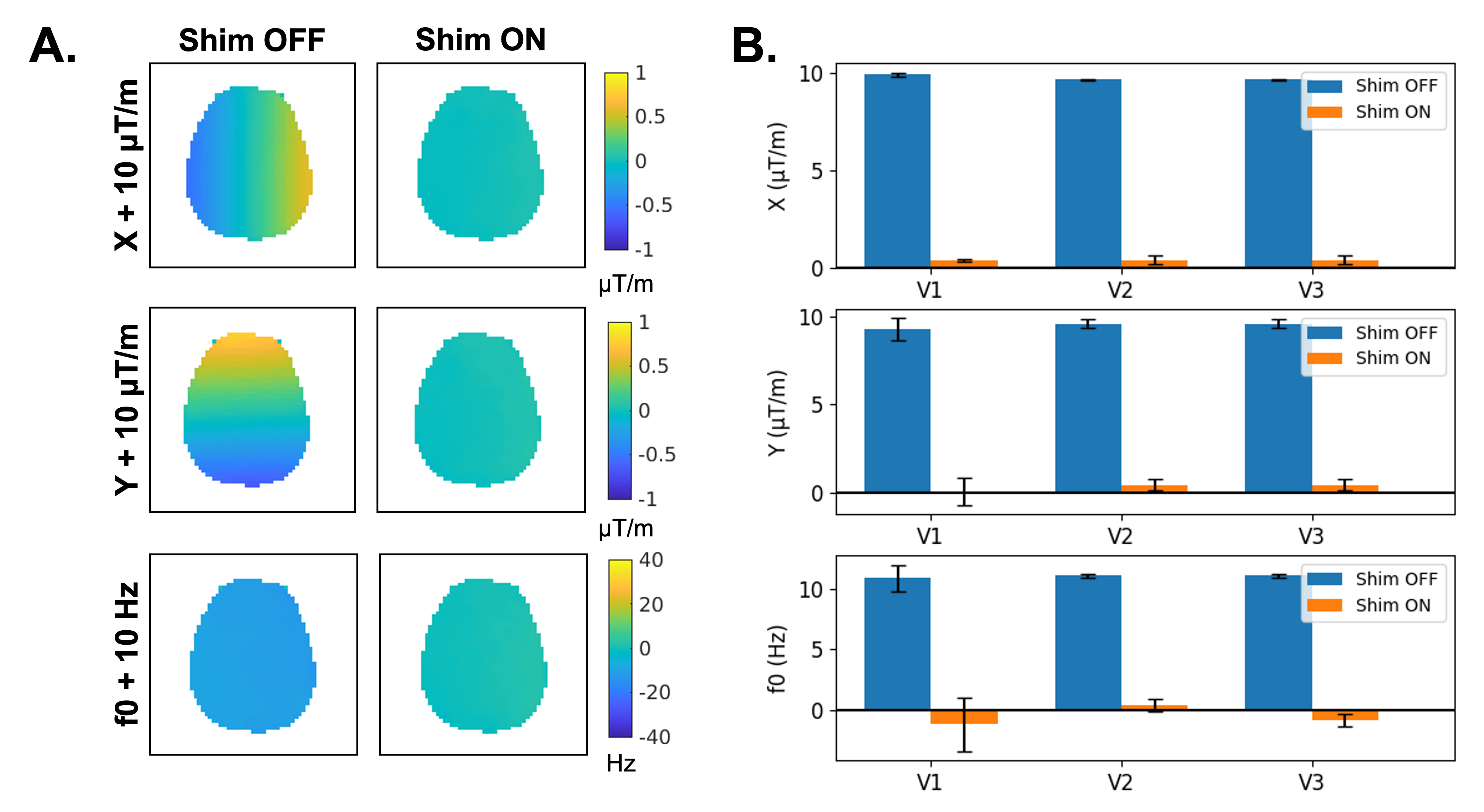
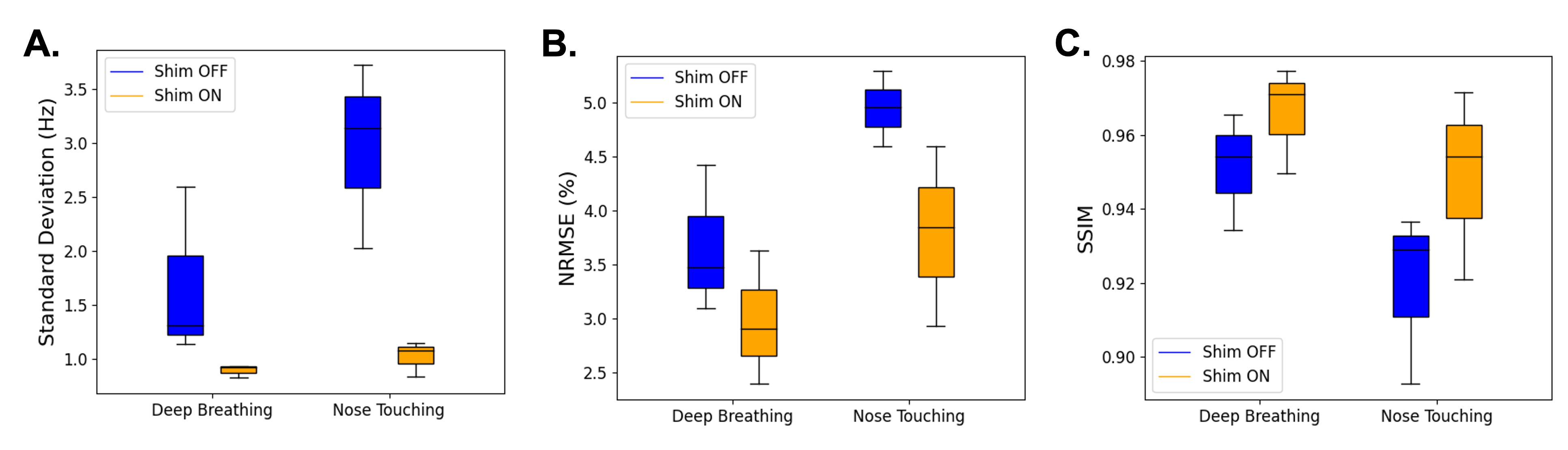
Accuracy and latency of FIDnav B0 shim updates: Figure 2 shows the measured $$$\Delta$$$B0 field maps and fitted shim coefficients with gradient offsets of 10 $$$\mu$$$T/m in X and Y, and a shift in the center frequency of 10 Hz. Applying measured FIDnav shim updates successfully compensated for the applied field offsets across all volunteers. The residual measured shim coefficients following application of FID-navigated field control were 0.41 ± 0.18 $$$\mu$$$T/m, 0.33 ± 0.47 $$$\mu$$$T/m, and 0.48 ± 1.09 Hz in X, Y and f0, respectively. The measured latency of FIDnav B0 shim updates was <12 ms.High-resolution T2*-weighted imaging: The impact of FID-navigated real-time shimming on T2*-weighted image quality during deep breathing and nose touching in volunteers is shown in Figures 3 and 4. Ghosting, blurring and signal dropout artifacts are visibly reduced with application of real-time shimming. Across all volunteers, FID-navigated shimming successfully reduced B0 field modulations and resulted in a substantial improvement in image quality (Fig. 5).
Discussion and Conclusion
FIDnavs facilitate real-time field control without impacting the timing of the acquisition or requiring any additional hardware. As spatial encoding information is captured in a separate reference scan, B0 field coefficients can be rapidly estimated and applied for slice-wise shimming. In this study, we demonstrate that FID-navigated B0 shim updates can successfully counteract spatiotemporal field perturbations and substantially improve T2*-weighted image quality in the presence of both deep breathing and nose touching. Improvement in T2*-weighted imaging is important for a range of clinical and research applications, particularly for subjects who are prone to move and/or breathe deeply, such as children or patients with Alzheimer’s disease.2 The proposed method could be extended to 3-dimensional acquisitions by estimating an additional shim coefficient in the Z-dimension. While FIDnavs can measure higher order spatiotemporal field changes, the second-order shim coils on the scanner are not designed for rapid switching. Future work will investigate higher order shimming with FIDnavs using a custom shim array coil.11Acknowledgements
This work was supported in part by the National Institutes of Health (NIH) under award number S10 OD0250111, in part by the NIH National Institute of Biomedical Imaging and Bioengineering (NIBIB) under award number R01 EB019483, and in part by an Early Career Award (#14989) from the Thrasher Research Fund.References
1. Van de Moortele, P.-F., Pfeuffer, J., Glover, G. H., Ugurbil, K. & Hu, X. Respiration-induced B0 fluctuations and their spatial distribution in the human brain at 7 tesla. Magn. Reson. Med. 47, 888–895 (2002).
2. Versluis, M. J. et al. Origin and reduction of motion and f0 artifacts in high resolution T2* magnetic resonance imaging: Application in Alzheimer’s disease patients. Neuroimage 51, 1082–1088 (2010).
3. Andersen, M. et al. Measuring motion-induced B0-fluctuations in the brain using field probes. Magn. Reson. Med. 75, 2020–2030 (2016).
4. Splitthoff, D. N. & Zaitsev, M. SENSE shimming (SSH): A fast approach for determining B0 field inhomogeneities using sensitivity coding. Magn. Reson. Med. 62, 1319–1325 (2009).
5. Wallace, T. E., Afacan, O., Kober, T. & Warfield, S. K. Rapid measurement and correction of spatiotemporal B0 field changes using FID navigators and a multi-channel reference image. Magn. Reson. Med. 83, 575–589 (2020).
6. Wallace, T. E. et al. Dynamic distortion correction for functional MRI using FID navigators. Magn. Reson. Med. 85, 1294–1307 (2021).
7. Duerst, Y. et al. Utility of real-time field control in T2*-weighted head MRI at 7T. Magn. Reson. Med. 76, 430–439 (2016).
8. Duerst, Y. et al. Real-time feedback for spatiotemporal field stabilization in MR systems. Magn. Reson. Med. 73, 884–893 (2015).
9. Ward, H. A., Riederer, S. J. & Jack, C. R. Real-time autoshimming for echo planar timecourse imaging. Magn. Reson. Med. 48, 771–780 (2002).
10. Alhamud, A., Taylor, P. A., van der Kouwe, A. J. W. & Meintjes, E. M. Real-time measurement and correction of both B0 changes and subject motion in diffusion tensor imaging using a double volumetric navigated (DvNav) sequence. Neuroimage 126, 60–71 (2016).
11. Stockmann, J. P. et al. A 31-channel integrated “AC/DC” B0 shim and radiofrequency receive array coil for improved 7T MRI. Magn. Reson. Med. 1–19 (2021). doi:10.1002/mrm.29022
Figures