MRI-Guided Robotic Prostate Biopsy
Junichi Tokuda1
1Radiology, Brigham and Women's Hospital, Boston, MA, United States
1Radiology, Brigham and Women's Hospital, Boston, MA, United States
Synopsis
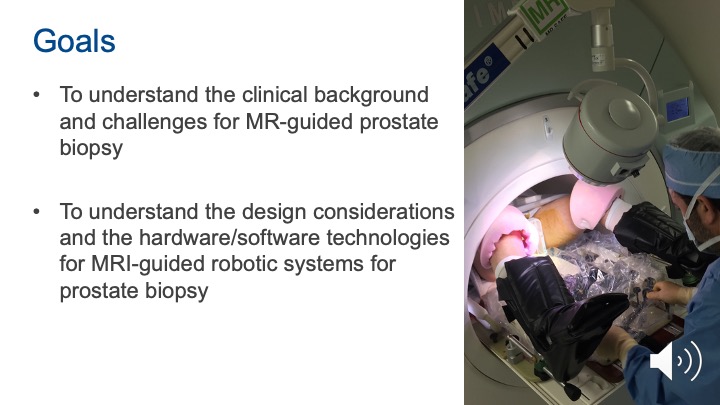
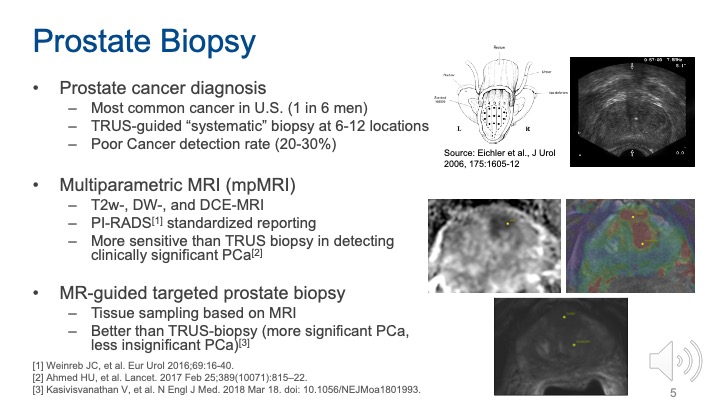
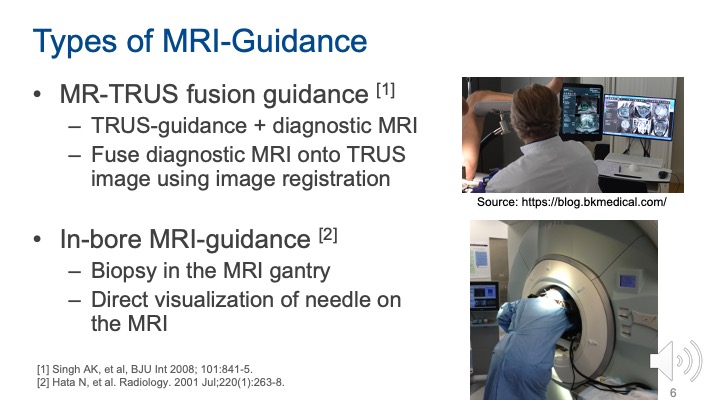
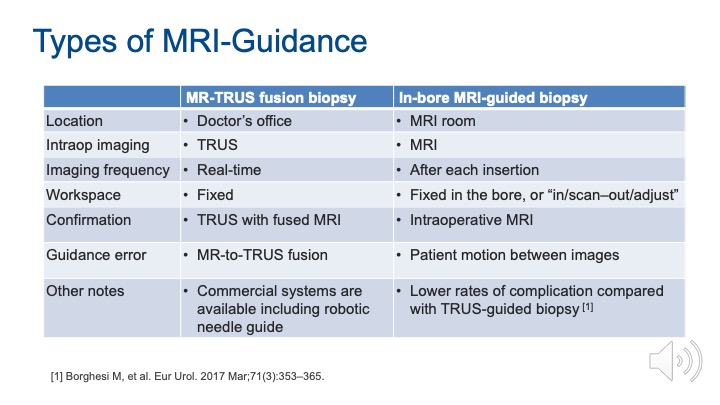
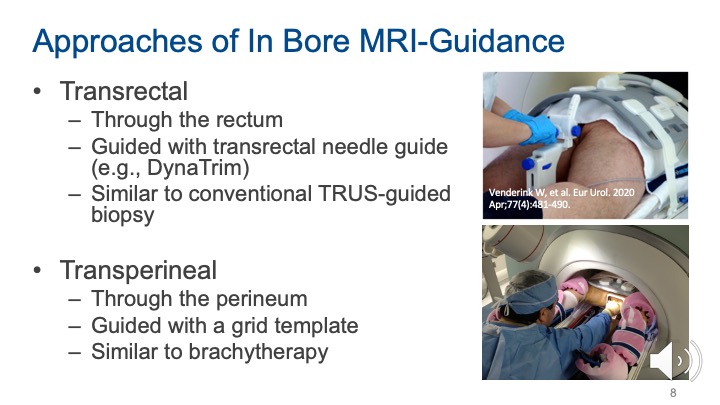
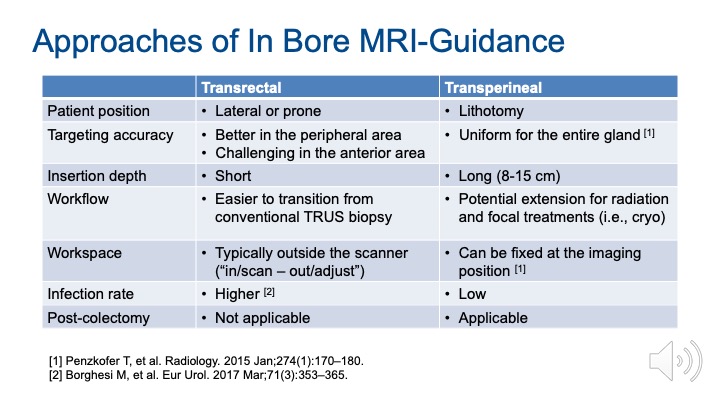
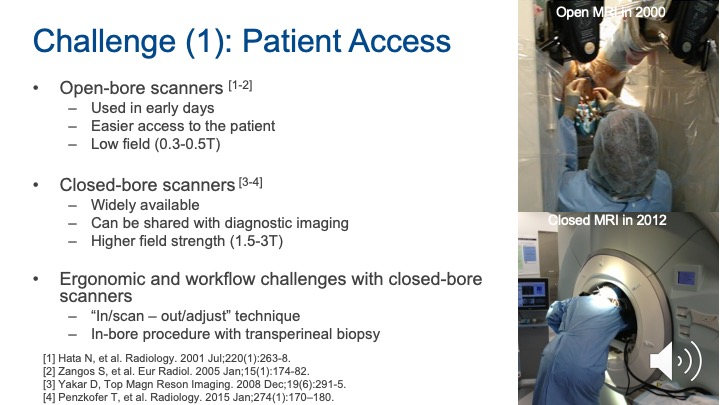
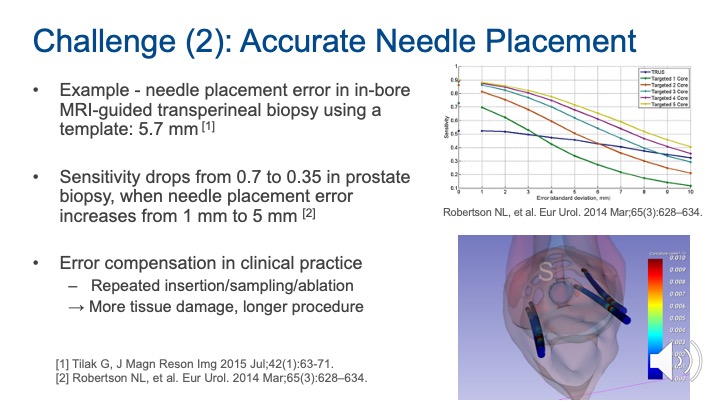
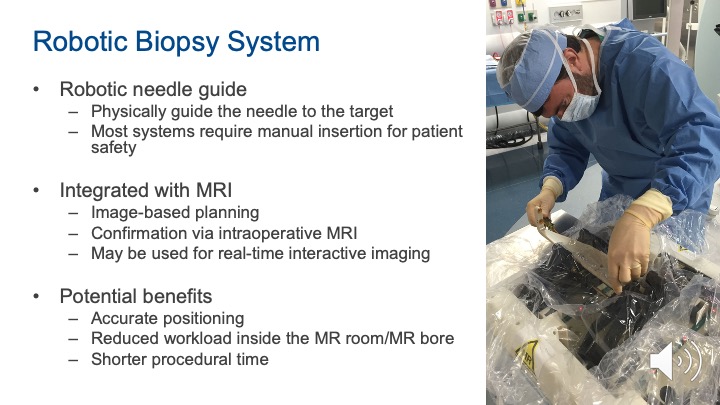
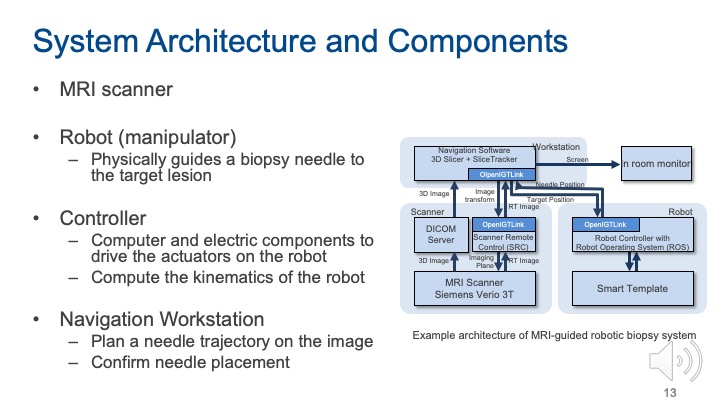
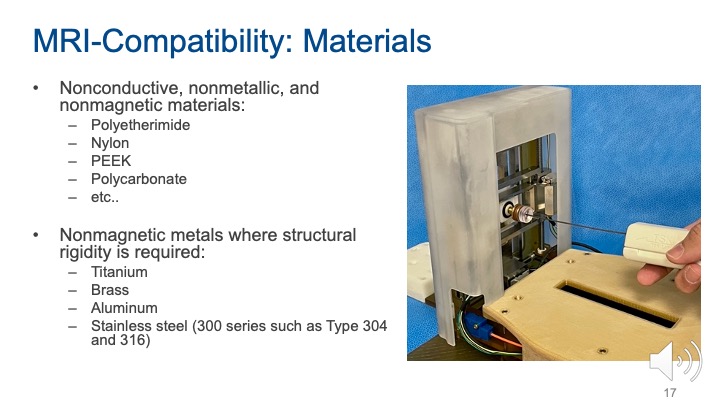
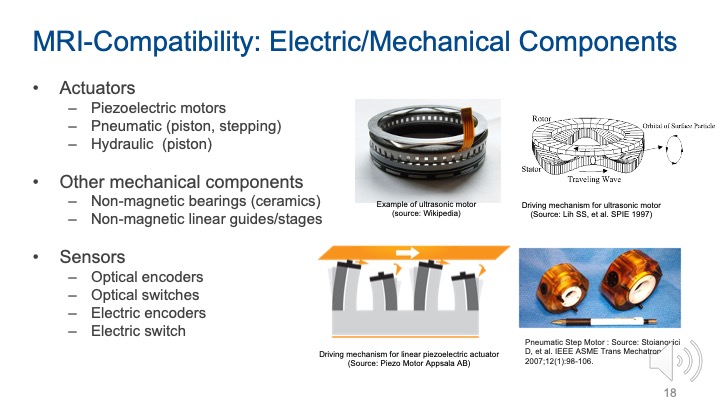
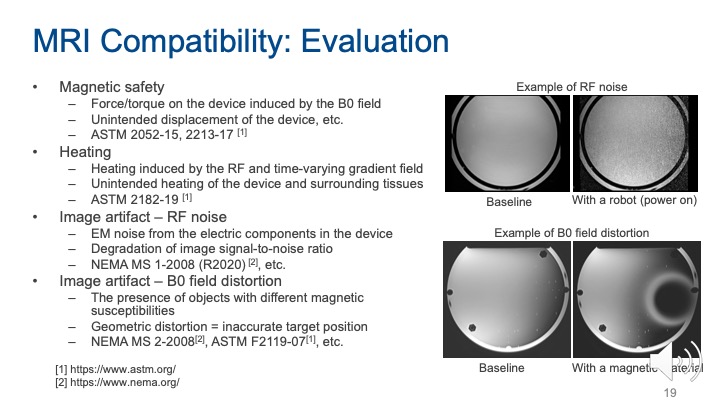
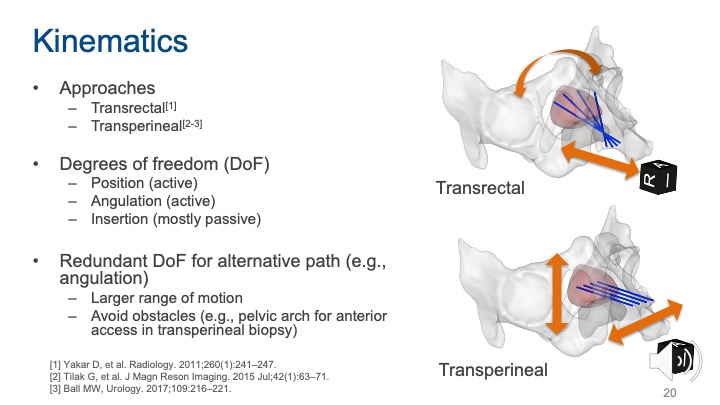
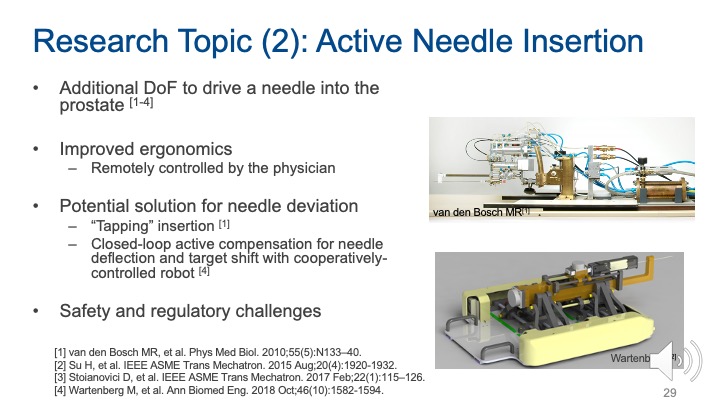
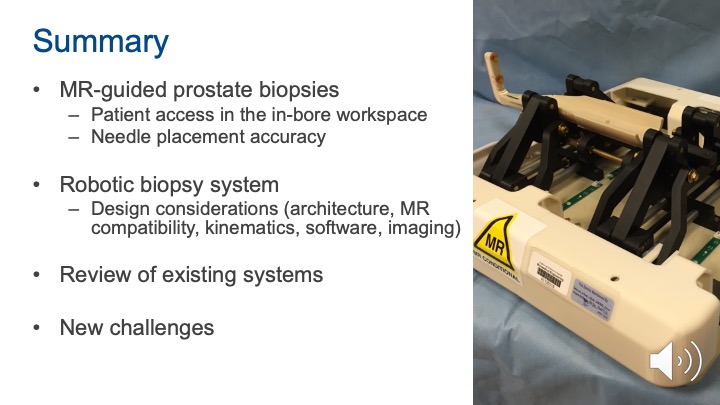
This presentation will overview the technologies and clinical application of MRI-guided robotic prostate biopsy. Robotic devices have been developed and clinically tested in recent years to address technical challenges in MRI-guided prostate biopsy, such as the limited access to the patient in the bore, and suboptimal needle placement accuracy. I will discuss the technologies for MR-guided robotic biopsy from several key aspects, including system architecture, MRI compatibility, kinematics design, software, imaging sequences, and evaluation of needle placement accuracy. Additionally, I will review some of the published studies that have demonstrated the clinical feasibility of MRI-guided robotic prostate biopsy.
Acknowledgements
No acknowledgement found.References
No reference found.Figures
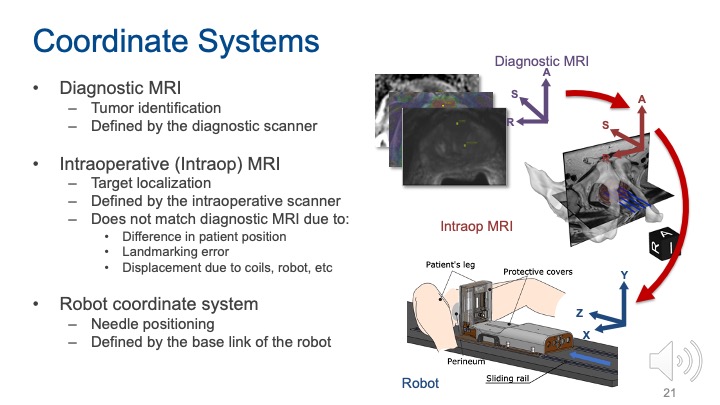
Slide #1
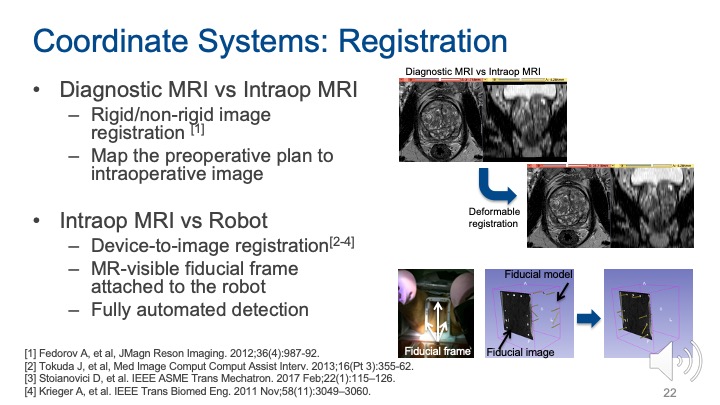
Slide #2
Slide #3
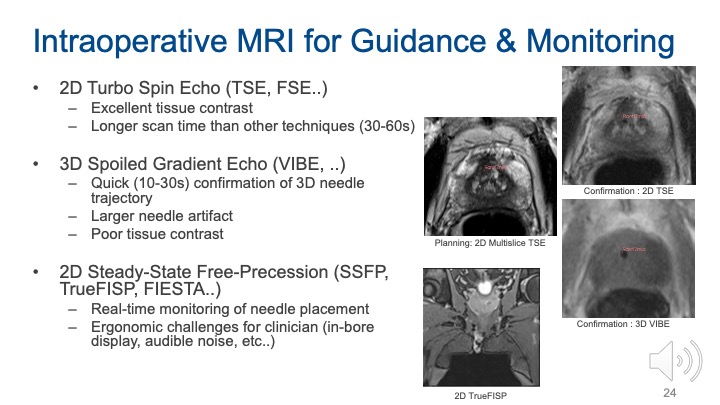
Slide #4
Slide #5
Slide #6
Slide #7
Slide #8
Slide #9
Slide #10
Slide #11
Slide #12
Slide #13
Slide #14
Slide #15
Slide #16
Slide #17
Slide #18
Slide #19
Slide #20
Slide #21
Slide #22
Slide #23
Slide #24
Slide #25
Slide #26
Slide #27
Slide #28
Slide #29
Slide #30