3770
Visual Remote Control of MRI Reconstruction Toolboxes1Fraunhofer Institute for Digital Medicine MEVIS, Bremen, Germany, 2DZHK (German Centre for Cardiovascular Research), Partner Site Goettingen, Berlin, Germany, Goettingen, Germany, 3Institute for Diagnostic and Interventional Radiology, University Medical Center Goettingen, Goettingen, Germany, 4MR-Imaging and Spectroscopy, Faculty 01 (Physics/Electrical Engineering), University of Bremen, Bremen, Germany
Synopsis
Commercial MRI software that is shipped with an MRI scanner is typically not suited for research and development in state-of-the-art MRI imaging schemes. In particular, the advanced MR imaging requires both high computing power and dedicated frameworks for (iterative) algorithms. Reconstruction frameworks tend to be rather optimized for MR reconstruction but usability, rapid prototyping and medical image analyses. We overcome this limit by providing a module interface in a medical image processing and visualization toolbox that enables remote control of virtualized MRI reconstruction toolboxes with an interface to the output data.
Introduction
With the advent of increasing computing capabilities and the development of computing intensive MRI raw data treatment such as parallel imaging and compressed sensing, the need for scalable hard- and software solutions for MR research and development has increased dramatically. Typically, production cycles of MRI vendors are comparably slow due to the regulation of medical products and cannot allways fulfill the needs of global research and development activities. Although, many regulations exist in conjunction with medical MRI scanners, different research groups have established toolboxes for advanced image reconstruction [1, 2] and MRI sequence development [3, 4]. Thereby, MRI could mature in terms of imaging speed and resolution enabling developing of next generation medical applications including also interventional procedures. Toolboxes like BART [1] are optimized for low-level programming and computing speed on GPUs. However, from a user perspective a more user-friendly interface for rapid prototyping in combination with state-of-the-art medical image processing and visualization tools is missing in the overall workflow. Due to the high demands on computing power of advanced reconstruction techniques, it may be desirable to decouple the control and outcome analysis from the actual computational unit. Here, we have embedded a remote-control interface into the MeVisLab research and development platform for medical image processing and visualization [5,6] that enables comfortable use of state-of-the-art, virtualized reconstruction frameworks.Methods
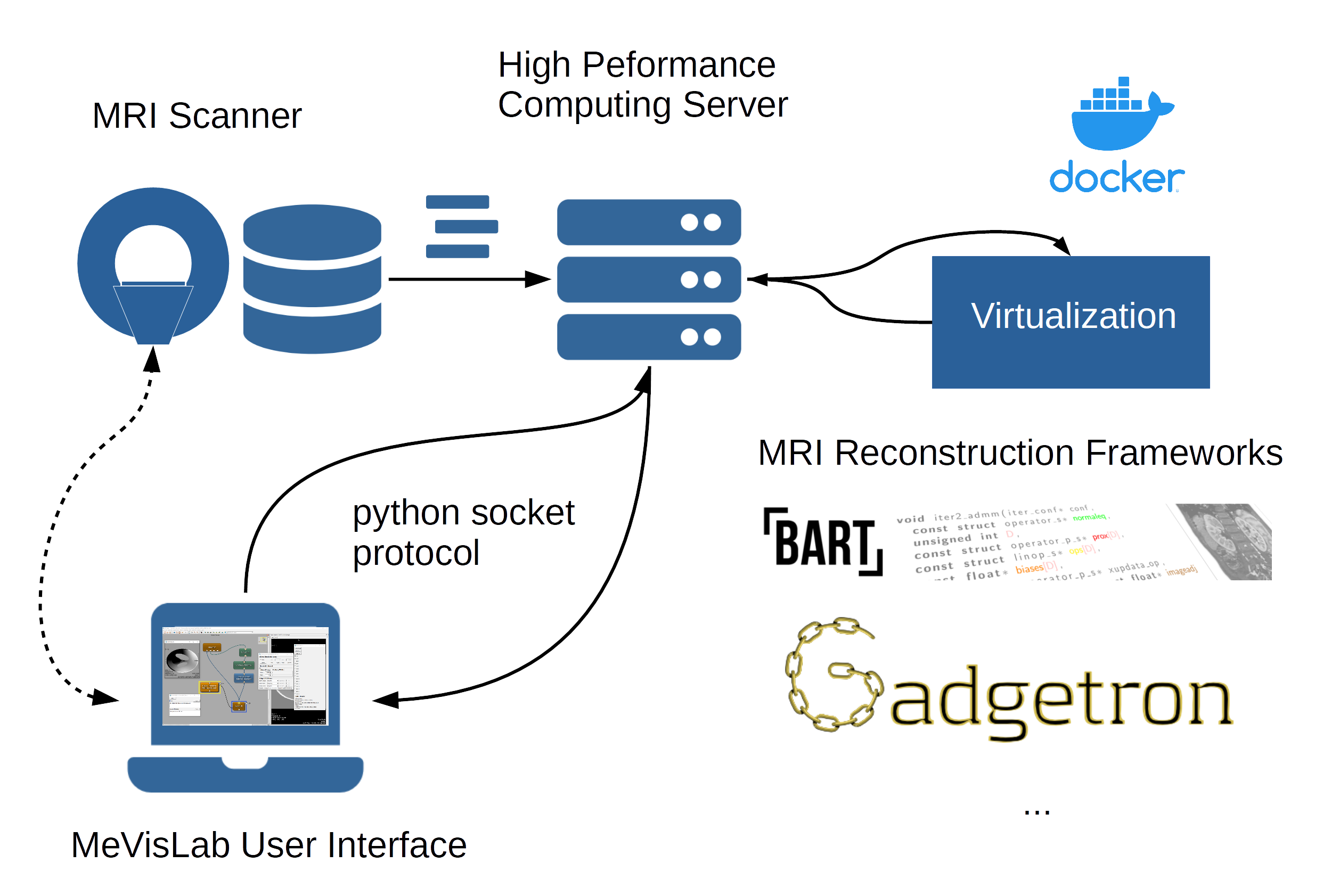
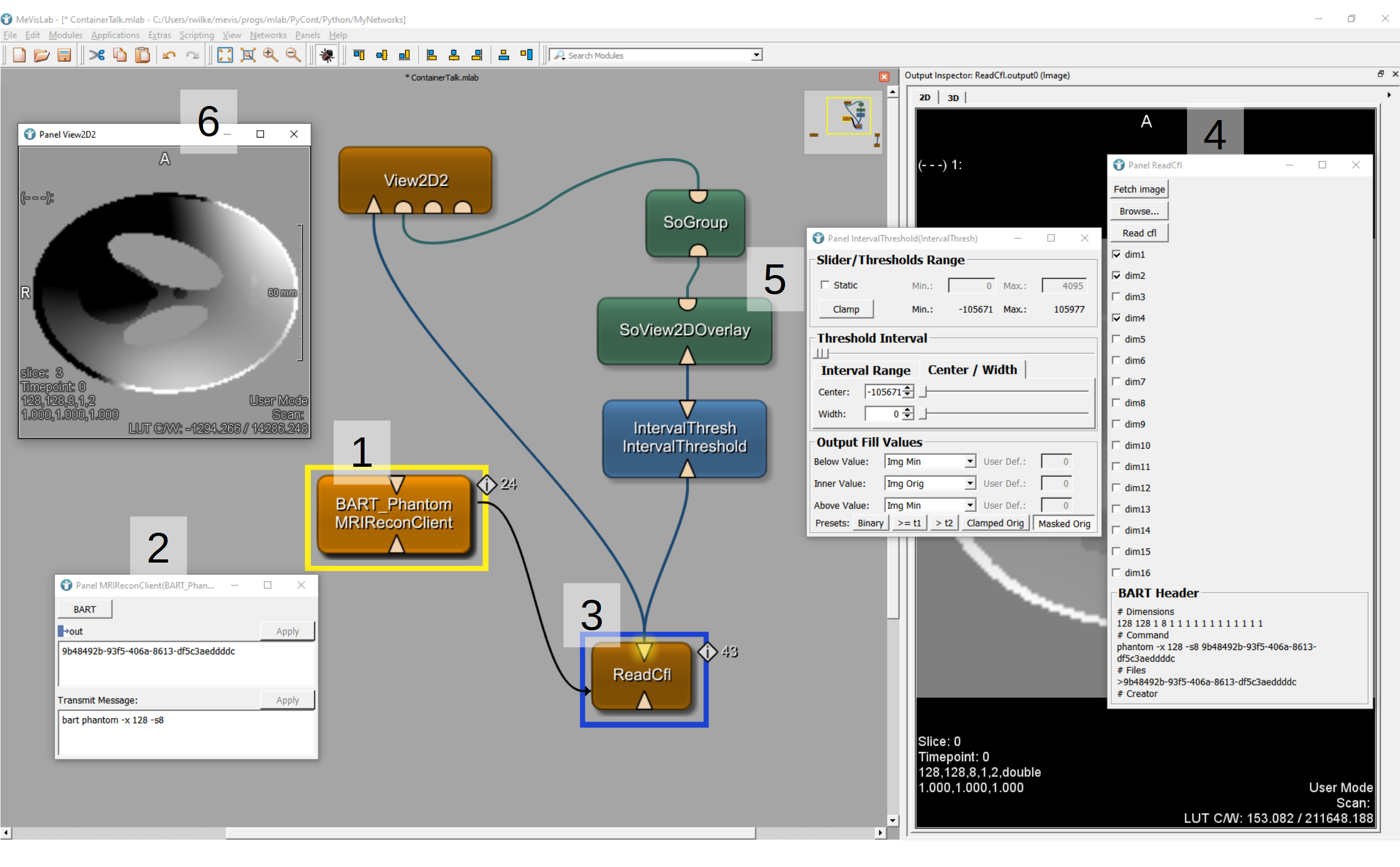
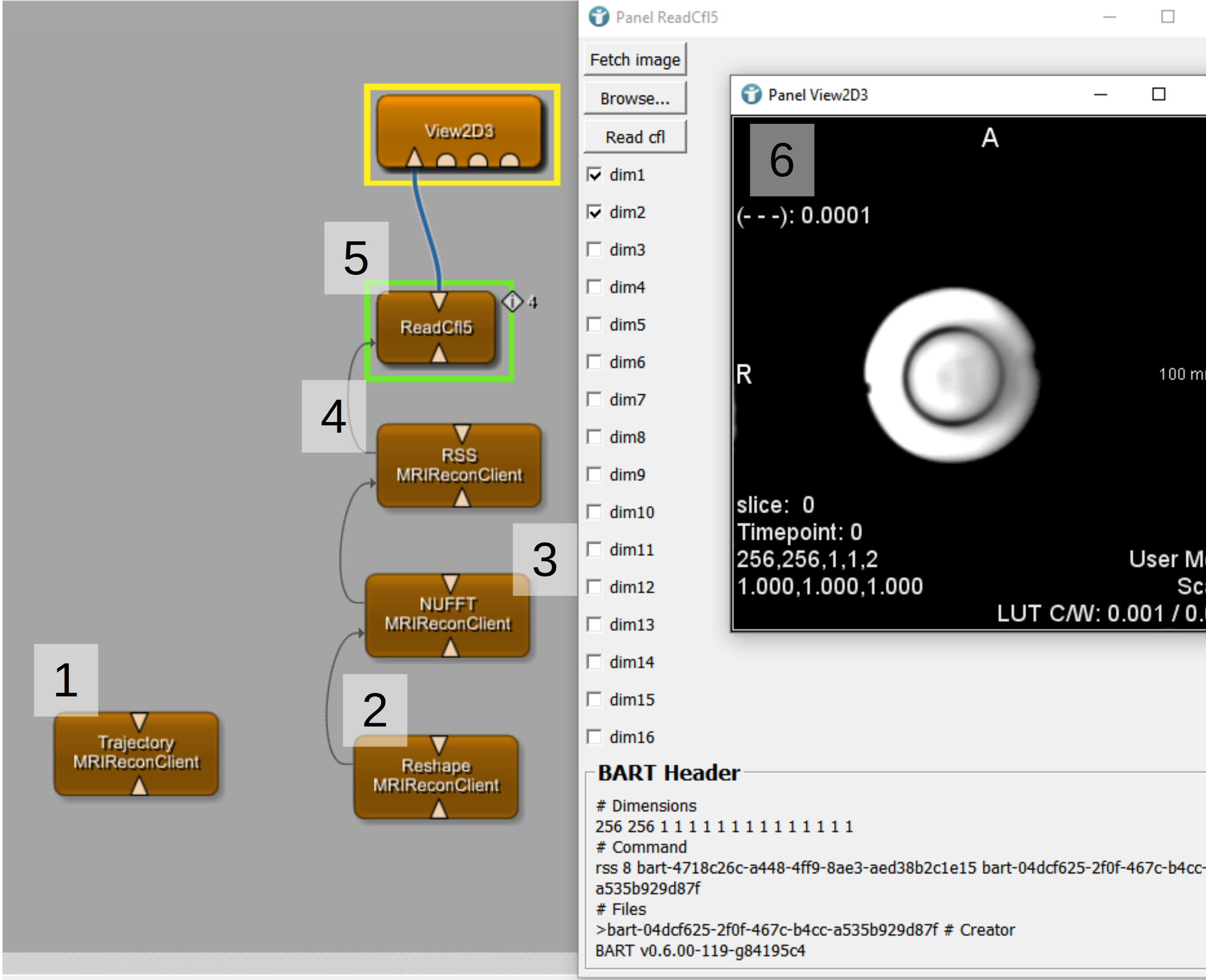
We have implemented a python-based socket server/client connection between MeVisLab and any remote computation host (Fig. 1). As an example, we have used a docker description of the BART toolbox. The server program waits for incoming reconstruction commands that are carried out via a running or freshly spawned container and provides the resulting data. Using the MeVisLab scripting language, we have implemented different modules for data transfer from and to the software and for implementation of reconstruction steps (Fig. 2). In addition, we have built a BART reconstruction chain for root-sum-of-squares (RSS) reconstruction of an MRI data set with a radial acquisition scheme (Fig. 3).Results
The implemented remote MRI reconstruction modules enable remote control of dockerized MRI data toolboxes such as BART or Gadgetron. As an example, we have shown a visualization of a phantom simulation with varying coil sensitivities from the BART software (Fig. 2) and an RSS reconstruction of real phantom MRI data (Fig. 3).Discussion & Conclusion
We believe that our results will be highly beneficial for MRI research and development groups as it encapsulates modern reconstruction approaches in a seamless manner. The development of recent virtualization concepts such as docker enables a more or less system independent deployment of these toolboxes. Notably, docker also allows NVIDIA GPU-computing and is thus also suited for specialized algorithms. Moreover, the whole reconstruction unit becomes reproducible by scripting the whole installation steps of BART into a docker file. In this sense, we also provide a small contribution to reproducible research with respect to quickly changing reconstruction toolboxes. The graphical programming in MeVisLab enables efficient rapid prototyping and composition of complicated reconstruction chains. There is a MeVisLab SDK license available for non-commercial institutions, such as universities, non-profit organizations, and other academic entities making it attractive for research groups.Acknowledgements
The authors would like to thank Sven Rothlübbers and Dennis Philipp for discussions on MeVisLab socket communication.References
[1] Uecker, M., Ong, F., Tamir, J. I., Bahri, D., Virtue, P., Cheng, J. Y., ... & Lustig, M. (2015, May). Berkeley advanced reconstruction toolbox. In Proc. Intl. Soc. Mag. Reson. Med (Vol. 23, No. 2486). https://mrirecon.github.io/bart/
[2] Hansen MS and Sorensen TS, "Gadgetron: An open source framework for medical image reconstruction", Magn. Reson. Med. Vol. 69(6), pp. 1768-1776.(2013). https://github.com/gadgetron/gadgetron/wiki
[3] Nielsen J-F and Noll DC, "TOPPE: A framework for rapid prototyping of MR pulse sequences", Magn. Reson. Med. Vol. 79(6), pp. 3128-3134. (2018). https://github.com/toppeMRI/toppe & https://toppemri.github.io/
[4] Cordes C, Konstandin S, Porter D, Günther M (2020) Portable and platform‐independent MR pulse sequence programs. Magn Reson Med 83(4):1277–1290
[5] Heckel F, Schwier M, Peitgen H-O. Object Oriented Application Development with MeVisLab and Python. Lecture Notes in Informatics (Informatik 2009: Im Focus das Leben). 2009; 154:1338-1351.
[6] Link F, Kuhagen S, Boskamp T, Rexilius J, Dachwitz S, and Peitgen HO. A Flexible Research and Development Platform for Medical Image Processing and Visualization. Proc. RSNA2004, Chicago, Dec 2004.
Figures