3232
Improving iMoCo through Group-wise Registration and Motion State Weighted Reconstruction1School of Biomedical Engineering, Shanghai Jiao Tong University, Shanghai, China
Synopsis
In original iMoCo algorithm, a single frame image was reconstructed by solving the iMoCo reconstruction model including the estimated motion fields and TGV sparse constraint. Since motion fields is critical in iMoCo algorithm, errors in motion estimation would deteriorate the final reconstructed image. In this study, we improved the performance of iMoCo through (1) reconstructing the full resolution dynamic images for motion estimation, (2) estimating motion fields through nonrigid group-wise registration, and (3) using a motion state weighted iMoCo reconstruction model. Residual streaking artifacts and certain image blurring were suppressed using the proposed algorithm in comparison with the original iMoCo.
Introduction
The original iMoCo (iterative Motion Compensation) reconstruction 1 relies on the motion fields estimated from motion-resolved images reconstructed by XD-GRASP method.2 A single frame image was reconstructed by solving the iMoCo reconstruction model including the estimated motion fields and a total generalized variation (TGV) sparse constraint. iMoCo has shown the capability to achieve high resolution and SNR lung images without introducing motion artifacts. However, iMoCo also depends on accurate motion estimation; errors in the motion fields would propagate to the final reconstructed image, causing blurring or ghosting artifacts.1 On the other hand, in the original iMoCo reconstruction model (Equation 1, N is the number of coils and M is the number of motion states, $$$T_k$$$ is transformation from reference state to motion state k), different motion states data have the same influence on the final reconstructed image $$$\widehat{X } $$$which would cause blurring in the final result due to registration error of images in different motion states. In this study, we aim to improve the performance of iMoCo reconstruction through (1) reconstructing the full resolution dynamic images for motion estimation using XD-GRASP-Pro,3 (2) estimating motion fields through nonrigid group-wise registration using a Lagrangian 3D+t B-splines transformation model 4 which takes both spatial and temporal smoothness of the motion into account, and (3) using an improved motion state weighted iMoCo reconstruction model. The performance of the proposed algorithm was tested for free breathing pulmonary MRI in comparison with the original iMoCo.$$\rm arg\min_\widehat{X} \sum_{i,k}^{N,M} \left\|W(FS_i T_k \widehat{X }-y_{ik})\right\|_2^2+ λ_s TGV(\widehat{X }),(1)$$
Methods
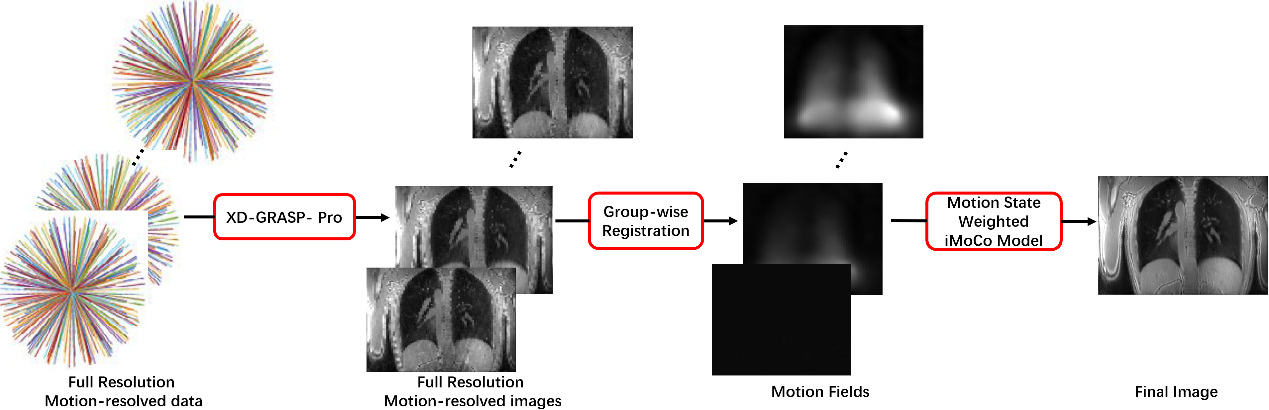
Figure 1 shows the workflow of improved iMoCo reconstruction. Motion-resolved k-space data were obtained through the same strategy used in original iMoCo which is binning the data into different motion states according to respiratory signal estimated using a k0/DC navigator.5 Given the full resolution motion-resolved k-space data, full resolution dynamic image series were reconstructed using XD-GRASP-Pro. A nonrigid group-wise registration using a Lagrangian 3D+t B-splines transformation model was then performed on the whole motion-resolved image series to simultaneously estimate motion fields from every motion state to the reference state. In the final reconstruction step, an improved reconstruction model (Equation 2) was used in which different motion states data consistency term multiply a weighted coefficient $$$α_k$$$ to adjust the influence of registration error of different motion states on the final result $$$T_k$$$. The value of $$$α_k$$$ is given in Equation 3, the larger the temporal distance, the smaller the value of $$$α_k$$$.$$\rm arg\min_\widehat{X} \sum_{i,k}^{N,M}α_k \left\|W(FS_i T_k \widehat{X }-y_{ik})\right\|_2^2+ λ_s TGV(\widehat{X }),(2)$$
$$α_k=M×\frac {e-e^{\frac {r|k-ref|}{M}}}{\sum_{t=1}^M\left(e-e^{\frac {r|t-ref|}M} \right)},0≤r≤\frac M{M-1},(3)$$
The proposed technique was evaluated in four free breathing pulmonary MRI datasets which were acquired using a 3D golden-angle half radial UTE sequence with hard pulse excitation on a 3T MR scanner (uMR790, United Imaging Healthcare, Shanghai, China). Detailed imaging parameters are: TR/TE = 3.3/0.07ms, FOV = 400×250×280mm3, voxel size = 1.14×1.14×1.14mm3, flip angle = 4°, a total of 106496 spokes were acquired during free breathing and the total scan time was 6 minutes. Both original and improved iMoCo reconstructions were performed on the pulmonary datasets with number of motion states M = 8. In order to evaluate key components of improved iMoCo, three improved terms: XD-GARSP-Pro (K = 5), group-wise registration and motion state weighted iMoCo reconstruction model (r = 1.14) were cumulatively added into the original iMoCo workflow referred to as iMoCo1, iMoCo2 and iMoCo3. The smoothness of transformation $$$T$$$ was measured as the irregularity of the ROI points trajectories:
$$Irr(p_r )=\frac1 M \sum_{k=1} ^M\left\| \frac{∂^2 T_k (p_r)}{∂k^2 }\right\|^2,(4)$$
with $$$p_r$$$ ROI point at the reference time point. Higher values mean more irregular/ less smooth trajectories.4
Results and Discussion
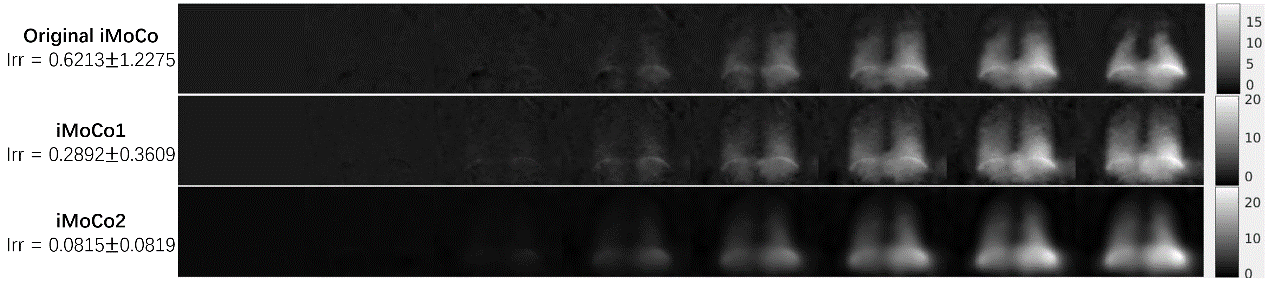
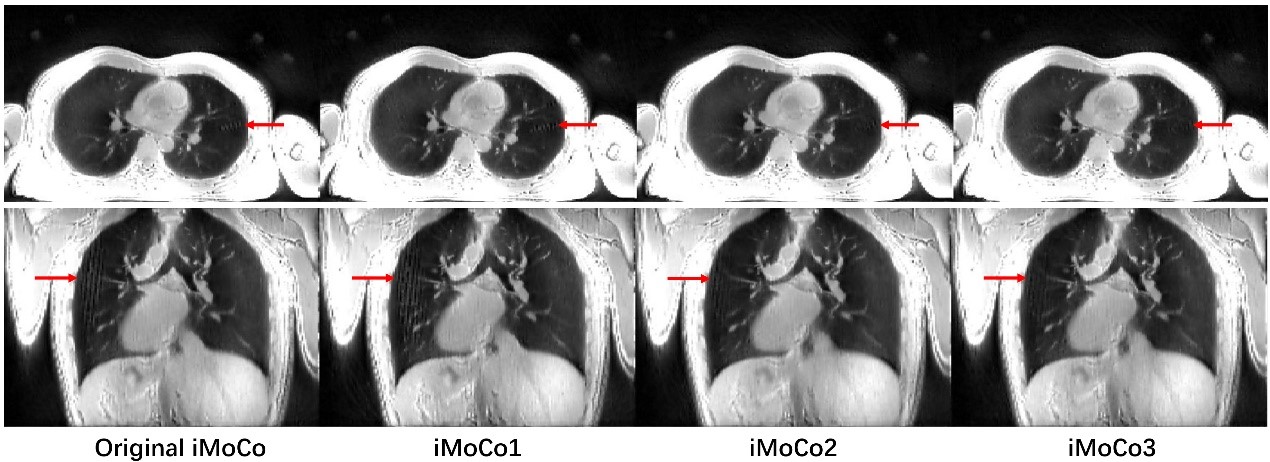
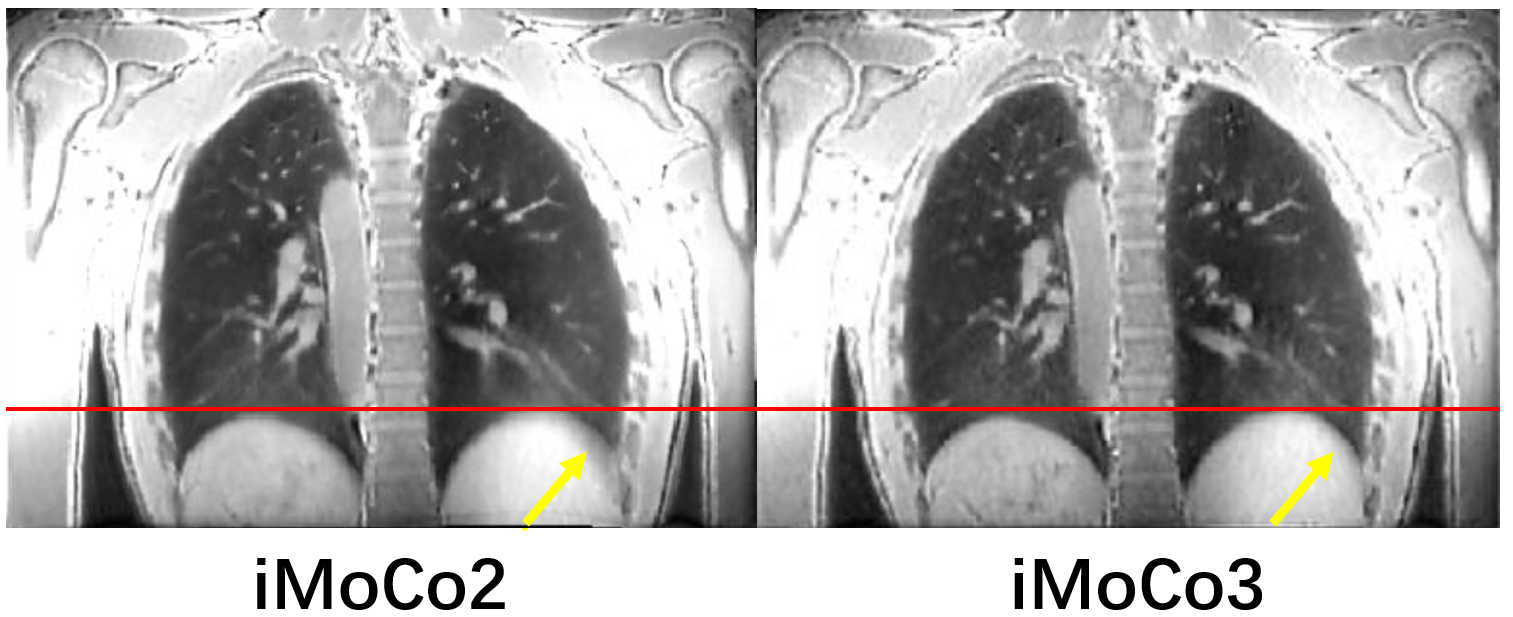
Figure 2 illustrates the motion fields from each motion state to reference state (ref =1) and Irr value derived from original iMoCo, iMoCo1 and iMoCo2. iMoCo2 including XD-GRASP-Pro and group-wise registration produced smoother spatial and temporal motion fields. Figure 3 shows the reconstruction results of different methods. Residual streaking artifacts can be observed in the images reconstructed using the original iMoCo. After using XD-GRASP-Pro reconstruct full resolution dynamic images, the streaking artifacts in final reconstruction results of iMoCo1 are still observable. By using group-wise registration on the dynamic images reconstructed by XD-GRASP-Pro, the streaking artifacts are suppressed effectively in iMoCo2 results. iMoCo3 which used a motion state weighted reconstruction model showed similar results with iMoCo2 primarily due to the negligible registration error on the showed positions. Figure 4 illustrates the registration results after performing group-wise registration (ref = 1). The registration error of yellow arrows labeled region is increased with the increased temporal distance between reference state and others. Figure 5 shows the comparison between iMoCo2 and iMoCo3 when large registration error in Figure 4 is occurred. Image blurring around diaphragm is reduced effectively using the improved reconstruction model.Conclusion
This study demonstrated the initial performance of the improved iMoCo reconstruction. The improved iMoCo employs XD-GRASP-Pro, group-wise registration and a motion state weighted iMoCo reconstruction model. Compared to the original iMoCo, the improved reconstruction is able to suppress residual streaking artifacts caused by high undersampling ratio and reduce image blurring resulted from certain large registration error effectively.Acknowledgements
No acknowledgement found.References
1. X. Zhu, M. Chan, M. Lustig, K. M. Johnson, P. E. Z. Larson, Iterative motion-compensation reconstruction ultra-short TE (iMoCo UTE) for high-resolution free-breathing pulmonary MRI. Magn Reson Med. 2020;83:1208-1221.
2. L. Feng et al., XD-GRASP: Golden-angle radial MRI with reconstruction of extra motion-state dimensions using compressed sensing. Magn Reson Med. 2016;75:775-788.
3. L.Feng et al., GRASP-Pro: imProving Golden-angle Radial MRI through a Self-Estimated Subspace. ISMRM Workshop 2020, Sedona, AZ, USA.
4. C. T. Metz, S. Klein, M. Schaap, T. van Walsum, W. J. Niessen, Nonrigid registration of dynamic medical imaging data using nD plus t B-splines and a groupwise optimization approach. Med Image Anal. 2011;15: 238-249.
5. S. Weick et al., DC-gated high resolution three-dimensional lung imaging during free-breathing. Journal Of Magnetic Resonance Imaging. 2013;37:727-732.
Figures