3051
RAMSES: Relaxation Alternate Mapping of Spoiled Echo Signals sequence for simultaneous accurate T1 and T2* mapping
Marco Andrea Zampini1,2, Jan Sijbers3, Marleen Verhoye2, and Ruslan Garipov1
1MR Solutions Ltd, Guildford, United Kingdom, 2Department of Biomedical Sciences, University of Antwerp, Wilrijk, Belgium, 3Department of Physics, University of Antwerp, Wilrijk, Belgium
1MR Solutions Ltd, Guildford, United Kingdom, 2Department of Biomedical Sciences, University of Antwerp, Wilrijk, Belgium, 3Department of Physics, University of Antwerp, Wilrijk, Belgium
Synopsis
Fast multiparametric mapping could ease the adoption of quantitative MRI in clinical practice. We propose a new 3D sequence (RAMSES) which toggles the readout modality between mono- and multi-gradient echo that, associated with the acquisition of one or several spoiled gradient echo images, can provide maps of T1, T2*, B1 and net magnetisation, M0. Results show the feasibility of RAMSES for accurate and precise relaxometry mapping within a clinically reasonable acquisition time.
Introduction
In the last decade, interest in multiparametric estimation has increased judging from the growing number of studies published on simultaneous relaxometry mapping1. Relaxometry parameters such as T1 and T2* have been demonstrated to be versatile biomarkers for the investigation of stroke, multiple sclerosis, to study the pathogenesis and the evolution of several neurodegenerative diseases, as well as for tumour identification and characterisation2,3. However, it is well known that T1 mapping can not transcend knowledge of the excitation field B1, whose inhomogeneities could hinder accuracy in T1 estimation, especially at high magnetic field4.Among the proposed sequences for B1 mapping, Actual Flip angle Imaging (AFI)5 stands out to be a low-SAR6 3D gradient-echo based sequence that implements two repetition times (TR2 = n·TR1, n>1) to sample each k-space line in different steady states. As part of TR2 is generally unused and hosts relaxation-induced signal decay, this could be sampled via multi gradient-echo readout without any time penalty. Here, we propose the Relaxation Alternate Mapping of Spoiled Echo Signals sequence (RAMSES) for simultaneous T1, T2*, B1, and net magnetisation (M0) mapping following the Variable flip angle with Actual Flip angle Imaging (VAFI)7 approach, which requires an AFI and at least a spoiled gradient echo (SPGR) image.
Methods
RAMSES was developed as a 3D RF-spoiled SPGR-based sequence – the respective pulse diagram is reported in Figure 1 – and tested at 4.7 T and 7 T with an MRI preclinical scanner (MR Solutions, Guildford, UK).Simulations: we performed sequence simulations via Extended Phase Graph model8 in order to define the RF spoiling increment to be used for TR1 = 20 ms, n = 4, T1 $$$\in$$$ [0.5, 4.5] s, T2 $$$\in$$$ [0.1, 1] s, D $$$\in$$$ [0, 0.002] mm2/s, flip angle α = 60°. RF phase for the j-th pulse was incremented as φj = φj-1 + jφ0.
Test samples: gelatin phantom and Gd-DOTA water solutions (Dotarem, Guerbet, Villepinte, FR). Ground truth values were estimated based on MRI data acquisition using a 22-points Inversion Recovery (TR = 10 s, TI $$$\in$$$ [0.075, 3.5] s) and a multi-echo gradient-echo (MGE) with bipolar readout (TR = 20 ms, α = 60°, TE1 = 2.19 ms, ΔTE = 1.24 ms, 6 echoes). RAMSES data were acquired with matrix size = [128$$$\times$$$128$$$\times$$$64], FOV = (40$$$\times$$$40$$$\times$$$40) mm3, TR1 = 20 ms, n = 4, TE = 2.19 ms, ΔTE = 1.24 ms, 5 echoes, read direction only spoiling gradient areas for TR1 and TR2 = 327.1/1414.7 mT·ms/m.
SPGR images were acquired with the same parameters, with α = [5,14,24]°, for a total of M = 3 volumes. T1, B1 and M0 were estimated voxel-wise by fitting the first two echo signals of RAMSES (SR1, SR2) and the SPGR images (SS). Steady state signal model for these were:
$$ S_{R 1,2} = M_0 \sin(\kappa\alpha) \cdot \frac{1-E_{2,1}+(1-E_{1,2})E_{2,1}\cos(\kappa\alpha)}{1-E_1E_2\cos^2(\kappa\alpha)} \, , \, S_{S} = M_0 \sin(\kappa\alpha) \cdot \frac{1-E_1}{1-E_1\cos(\kappa\alpha)} $$
with κ representing the flip angle scaling factor, E1,2 = exp(-TR1,2/T1) and assuming TE<<T2*. The residual sum of squares was minimised in a bounded condition using the L-BFGS-B algorithm9:
$$ RSS = \sum_{i=1}^2 \Big( S_{Ri} - \hat{S}_{Ri} \Big)^2 + \sum_{j=1}^{M} \Big( S_{S,j} - \hat{S}_{S,j} \Big)^2 $$ where $$$\mathrm{S}$$$ and $$$\mathrm{\hat{S}}$$$ represent the voxel-wise model and observed signal intensity, respectively. T2* was computed by fitting SRi with i=[2,5] against an exponential decay.
Results
RF spoiling characteristics for RAMSES follow the behavior of AFI sequence, so we chose the RF spoiling characteristic increment φ0 = 56.5°, which both minimises the median and the range of the absolute distance between the simulated signal and the ideally spoiled steady state signal for SR1 (see Figure 2).Full 3D RAMSES volumes with three additional SPGR volumes were acquired with a total acquisition time of 22 minutes with no additional time with respect to VAFI method. Mean and standard error for T1 and T2* estimates from RAMSES on phantoms are reported in Figure 3 and compared to IR and MGE values, respectively. T1 values show a small underestimation with respect to the ground truth values (relative difference lower than 10% - its higher value for the 125 mM sample is likely due to the T2*>>TE assumption of RAMSES, here violated), RAMSES mean and standard errors for T2* are comparable to ground truth MGE values. Independent fitting of the 3 SPGR volumes with no B1 information resulted in biased (>30%) and noisy (standard deviation > 1.2s) T1 estimates.
Discussion
RAMSES allows accurate and precise estimation of both T1 and T2* for a range of values at high magnetic field where B1 inhomogeneities can result in variations of the flip angle amplitude exceeding 40% of the nominal value. Spoiling characteristics need to be carefully taken into consideration to avoid ghost artifacts and biases from the ideal steady state, which may arise when a completely spoiled regime is not reached. Further correction of T1 values based on the computed T2* values could be integrated. Also, validation of the RAMSES protocol for in-vivo imaging is needed.Conclusion
We propose RAMSES, a new 3D gradient-echo based sequence for quantitative relaxometry mapping which, in combination with at least one SPGR is able to provide accurate T1, T2*, B1, and M0 maps.Acknowledgements
This research was funded by the B-Q MINDED EU H2020 project under grant agreement No.764513.References
[1] “Scopus.” http://www.scopus.com/. search criteria: (simultaneous OR simultaneously) AND MRI AND (mapping OR map) AND (T1 OR T2) - accessed December 4, 2020.[2] Margaret Cheng H.-L., Stikov N., Ghugre N. R., and Wright G. A., “Practical medical applications of quantitative MR relaxometry”, Journal of Magnetic Resonance Imaging, vol. 36, no. 4, pp. 805–824, 2012.
[3] Péran P., Hagberg G., Luccichenti G., Cherubini A., Brainovich V., Celsis P., Caltagirone C., and Sabatini U., “Voxel-based analysis of R2* maps in the healthy human brain”, Journal of Magnetic Resonance Imaging, vol. 26, no. 6, pp. 1413–1420, 2007.
[4] Stikov N., Boudreau M., Levesque I. R., Tardif C. L., Barral J. K., and Pike G. B., “On the accuracy of T1 mapping: searching for common ground”, Magnetic Resonance in Medicine, vol. 73, no. 2, pp. 514–522, 2015.
[5] Yarnykh V. L., “Actual flip-angle imaging in the pulsed steady state: a method for rapid three-dimensional mapping of the transmitted radiofrequency field”, Magnetic Resonance in Medicine, vol. 57, no. 1, pp. 192–200, 2007.
[6] Pohmann R. and Scheffler K., “A theoretical and experimental comparison of different techniques for B1 mapping at very high fields”, NMR in Biomedicine, vol. 26, no. 3, pp. 265–275, 2013.
[7] Hurley S. A., Yarnykh V. L., Johnson K. M., Field A. S., Alexander A. L., and Samsonov A. A., "Simultaneous variable flip angle–actual flip angle imaging method for improved accuracy and precision of three-dimensional T1 and B1 measurements”, Magnetic Resonance in Medicine, vol. 68, no. 1, pp. 54–64, 2012.
[8] Hennig J., “Echoes — how to generate, recognize, use or avoid them in MR-imaging sequences. Part I: Fundamental and not so fundamental properties of spin echoes”, Concepts in Magnetic Resonance, vol. 3, no. 3, pp. 125–143, 1991.
[9] Byrd R. H., Lu P., Nocedal J., and Zhu C., “A limited memory algorithm for bound constrained optimization”, SIAM Journal on scientific computing, vol. 16, no. 5, pp. 1190–1208, 1995.
[10] Shen Y., Goerner F. L., Snyder C., Morelli J. N., Hao D., Hu D., Li X., and Runge V. M., “T1 relaxivities of gadolinium-based magnetic resonance contrast agents in human whole blood at 1.5, 3, and 7 T”, Investigative Radiology, vol. 50, no. 5, pp. 330–338, 2015.
Figures
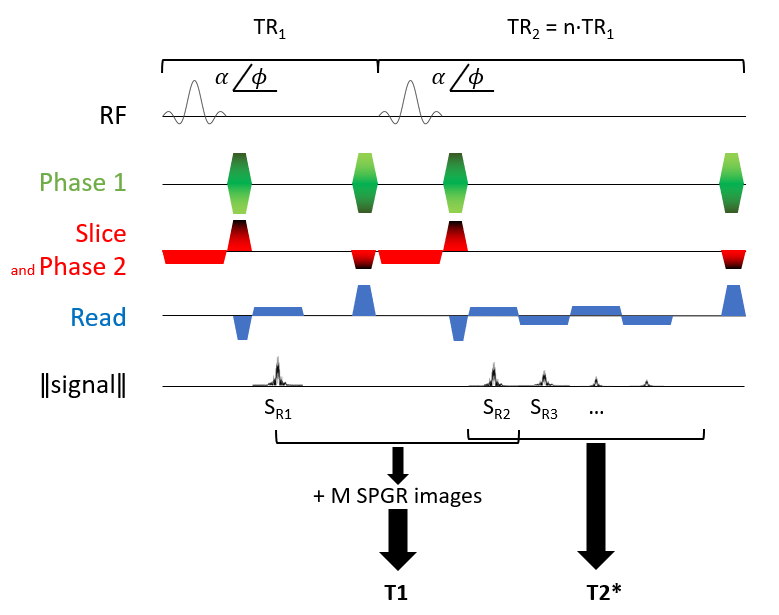
Figure 1: RAMSES pulse sequence diagram and parameter estimation scheme. With a Cartesian acquisition scheme, each k-space line is sampled during TR1 and TR2 with a mono- and multi-gradient echo, respectively. RF spoiling is employed by incrementing pulse phase φ while gradient spoiling takes place after data acquisition in read-only direction. Rewinder gradients are played in both phase directions.
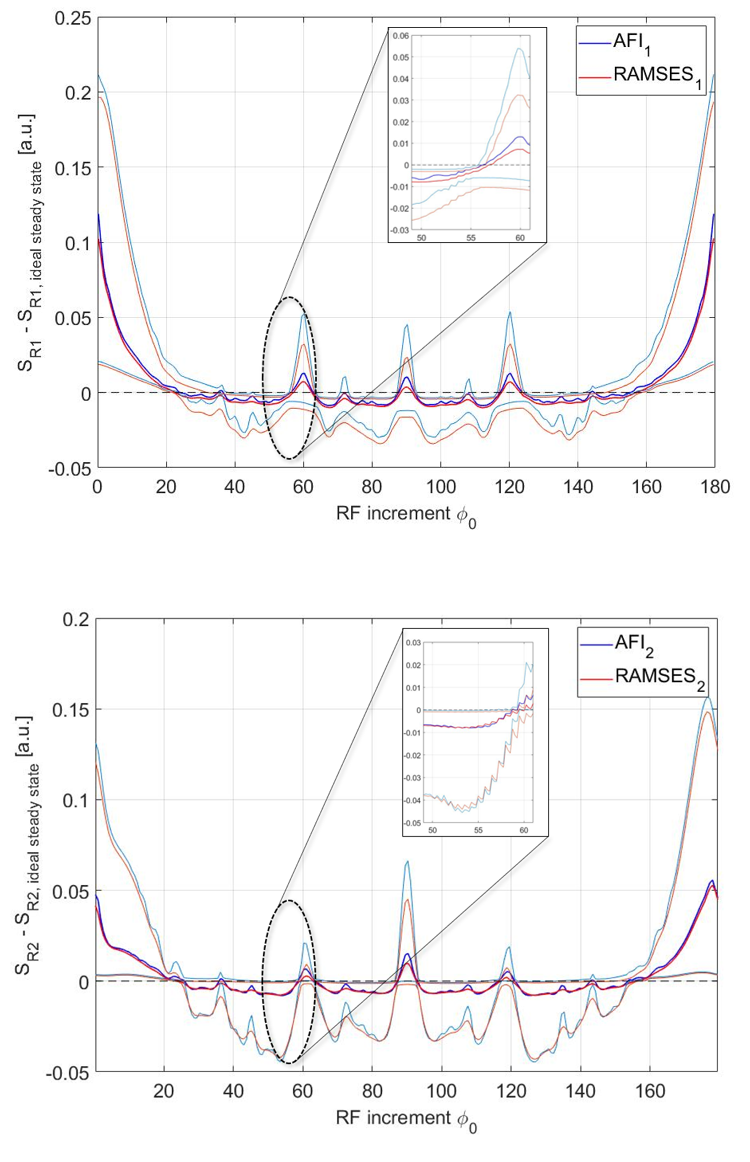
Figure 2: Distance of the signal intensity to the ideal steady state signal as a function of RF phase increment φ0 (symmetry relative to 90° and period of 180° is characteristic of AFI sequence). Horizontal dashed zero line represents the ideal steady state signal found in a completely spoiled regimen. Central blue and red lines refer to the median AFI and RAMSES signals, azure and orange lines refer to the 5th and 95th percentile of the signal distributions per each phase increment.
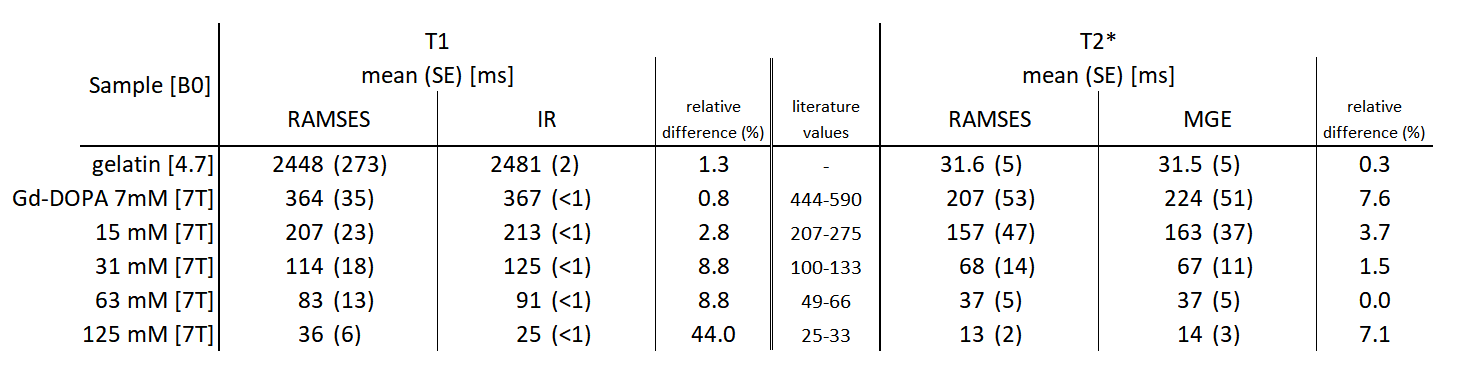
Figure 3: Estimated T1 and T2* mean and standard error values of the phantoms (gelatin and Gd-DOPA solutions) for RAMSES and their relative ground truth estimated via Inversion Recovery for T1 and multi-echo gradient-echo for T2*. Similar T1 values for Gd-DOTA solutions are found in Shen et al.10 although solvent and temperature were different (human blood at 37°C against water at room temperature).